ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству определения формы волны возбуждения, устройству приведения в действие двигателя, способу определения формы волны возбуждения, способу приведения в действие двигателя и программе, и в частности пригодно для использования для возбуждения двигателя. Данная заявка базируется на и испрашивает приоритет предыдущей японской патентной заявки № 2021-185783, поданной 15 ноября 2021 г., содержание которой в полном объеме включено в данное описание посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Если двигатель в ходе приведения в действие вибрирует, может генерироваться шум. Дополнительно, если двигатель, являющийся источником мощности, вибрирует в гибридном транспортном средстве или электрическом транспортном средстве, это может негативно сказываться на комфорте езды. Таким образом, желательно подавлять вибрацию вращающейся электрической машины. Для подавления вибрации двигателя, можно рассмотреть возможность изменения конструкции двигателя. Однако, например, для изменения конструкции существующего двигателя требуется серьезная работа, например, замена вращающейся электрической машины. Соответственно, осуществляется управление сигналом возбуждения, который подается на обмотку статора двигателя для возбуждения двигателя.
[0003] Непатентный источник 1 описывает, что для подавления генерации пульсации крутящего момента, ток возбуждения, полученный наложением тока третьей гармоники на ток основной волны, используется в качестве тока возбуждения, который должен протекать через конструкцию разомкнутой обмотки PMSM (синхронного двигателя с постоянными магнитами). Дополнительно, патентный источник 1 описывает, что, когда базовый ток каждой фазы n-фазного переменного тока выражается как B × cosθ + C × sinθ, ток возбуждения, полученный суммированием тока высокого порядка, выраженного в виде e × cos(pθ) + f × sin(pθ), где p устанавливается равным 6m±1 (m - натуральное число), с базовым током, используется в качестве тока возбуждения, который должен протекать через обмотку возбуждения n-фазного переменного тока.
Библиография
Патентный источник
[0004] Патентный источник 1: японская выложенная патентная публикация № 2007-312520
Непатентный источник
[0005] Непатентный источник 1: В соавторстве Kazunari Honda и Kan Akatsu, “Driving an Open-Winding Structure PMSM Using Third Harmonic Current Control”, IEEJ Transactions on Industry Applications, т. 141, № 1, стр. 35-45, 1 января 2021 г.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая проблема
[0006] Однако в технике, описанной в непатентном источнике 1, в качестве порядка высокой частоты, подлежащей наложению на основную волну, порядок, способный снижать пульсацию крутящего момента синхронного двигателя заранее задается на основе теоретических соображений, и на ток основной волны накладывается только гармоническая компонента заданного порядка. Дополнительно, в технике, описанной в патентном источнике 1, в качестве порядка высокой частоты, подлежащей наложению на основную волну, порядок, способный снижать электромагнитную силу в радиальном направлении синхронного двигателя, заранее задается на основании результата феноменологического анализа, и на ток основной волны накладывается только гармоническая компонента заданного порядка. Таким образом, токи возбуждения, которые можно получать способами, описанными в непатентном источнике 1 и патентном источнике 1, вряд ли можно рассматривать как токи возбуждения, достаточные для подавления вибраций двигателей, и, таким образом могут существовать более оптимальные токи возбуждения. Фактически, непатентный источник 1 описывает, что шестую гармоническую компоненту пульсации крутящего момента PMSM можно в достаточной степени подавлять, но невозможно в достаточной степени подавлять вибрацию PMSM.
[0007] Настоящее изобретение было сделано на основании вышеописанных проблем, и его задача состоит в определении временной формы волны сигнала возбуждения, способной эффективно подавлять вибрацию двигателя.
Решение проблемы
[0008] Устройство определения формы волны возбуждения настоящего изобретения представляет собой устройство определения формы волны возбуждения для определения формы волны возбуждения как временной формы волны сигнала возбуждения, который подается на обмотку статора двигателя, причем устройство определения формы волны возбуждения содержит: блок установления возможного решения, выполненный с возможностью установления группы возможных решений, включающей в себя одно или более возможных решений по форме волны возбуждения; блок анализа электромагнитного поля, выполненный с возможностью вычисления электромагнитной силы, формируемой в статоре двигателя, когда одно или более возможных решений, включенных в группу возможных решений, подается на двигатель, путем выполнения анализа электромагнитного поля; и блок определения формы волны возбуждения, выполненный с возможностью определения формы волны возбуждения на основании результата выполнения анализа электромагнитного поля блоком анализа электромагнитного поля, в котором блок установления возможного решения включает в себя: блок установления первоначального возможного решения, который устанавливает первоначальную группу возможных решений на основании состояния основной волны, которое задает основную волну формы волны возбуждения, и состояния наложения гармоники, которое задает гармонику, подлежащую наложению на основную волну; и блок обновления возможного решения, который устанавливает новую группу возможных решений из введенной в него группы возможных решений; и при этом блок определения формы волны возбуждения определяет форму волны возбуждения из первоначальной группы возможных решений или новой группы возможных решений.
Устройство приведения в действие двигателя настоящего изобретения представляет собой устройство приведения в действие двигателя для приведения в действие двигателя, содержащее: блок получения рабочего состояния, выполненный с возможностью получения рабочего состояния при работе двигателя; блок получения формы волны возбуждения, выполненный с возможностью получения, из фрагментов информации, каждый из которых задает форму волны возбуждения, определенную для каждого из состояний основной волны устройством определения формы волны возбуждения по любому из пп. 1-9, информации, которая задает форму волны возбуждения, соответствующую рабочему состоянию при работе двигателя, полученному блоком получения рабочего состояния; и блок генерации сигнала возбуждения, выполненный с возможностью генерации сигнала возбуждения для возбуждения двигателя, на основании информации, которая задает форму волны возбуждения, полученную блоком получения формы волны возбуждения.
[0009] Способ определения формы волны возбуждения настоящего изобретения представляет собой способ определения формы волны возбуждения для определения формы волны возбуждения, представляющей собой временную форму волны сигнала возбуждения, который подается на обмотку статора двигателя, причем способ определения формы волны возбуждения содержит: этап установления возможного решения, на котором устанавливают группу возможных решений, включающую в себя одно или более возможных решений по форме волны возбуждения; этап анализа электромагнитного поля, на котором вычисляют электромагнитную силу, формируемую в статоре двигателя, когда одно или более возможных решений, включенных в группу возможных решений, подается на двигатель, путем выполнения анализа электромагнитного поля; и этап определения формы волны возбуждения, на котором определяют форму волны возбуждения на основании результата выполнения анализа электромагнитного поля на этапе анализа электромагнитного поля, в котором этап установления возможного решения включает в себя: этап установления первоначального возможного решения, на котором устанавливают первоначальную группу возможных решений на основании состояния основной волны, которое задает основную волну формы волны возбуждения, и состояния наложения гармоники, которое задает гармонику, подлежащую наложению на основную волну; и этап обновления возможного решения, на котором устанавливают новую группу возможных решений из введенной в него группы возможных решений; и при этом на этапе определения формы волны возбуждения определяют форму волны возбуждения из первоначальной группы возможных решений или новой группы возможных решений.
Способ приведения в действие двигателя настоящего изобретения представляет собой способ приведения в действие двигателя для приведения в действие двигателя, причем способ приведения в действие двигателя включает в себя: этап получения рабочего состояния, на котором получают рабочее состояние при работе двигателя; этап получения формы волны возбуждения, на котором получают, из фрагментов информации, каждый из которых задает форму волны возбуждения, определенную для каждого из состояний основной волны способом определения формы волны возбуждения, информацию, которая задает форму волны возбуждения, соответствующую рабочему состоянию при работе двигателя, полученному на этапе получения рабочего состояния; и этап генерации сигнала возбуждения, на котором генерируют сигнал возбуждения для возбуждения двигателя, на основании информации, которая задает форму волны возбуждения, полученную на этапе получения формы волны возбуждения.
[0010] Программа настоящего изобретения предписывает компьютеру функционировать как каждый блок устройства определения формы волны возбуждения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
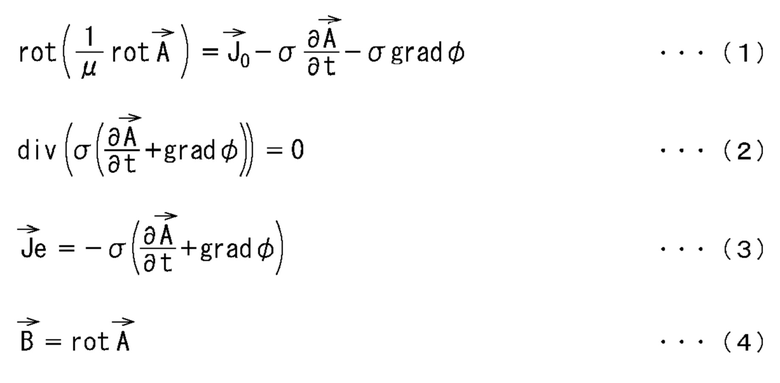
[0011] Фиг. 1 - вид, демонстрирующий один пример функциональной конфигурации устройства определения формы волны возбуждения.
Фиг. 2 - вид, демонстрирующий один пример функциональной конфигурации устройства приведения в действие двигателя.
Фиг. 3 - вид, демонстрирующий один пример конфигурации двигателя.
Фиг. 4 - вид, демонстрирующий один пример временной формы волны тока возбуждения.
Фиг. 5 - блок-схема операций, поясняющая один пример способа определения формы волны возбуждения.
Фиг. 6 - блок-схема операций, поясняющая один пример способа приведения в действие двигателя.
Фиг. 7 - вид, демонстрирующий один пример конфигурации оборудования устройства определения формы волны возбуждения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0012] Далее вариант осуществления настоящего изобретения будет описан со ссылкой на чертежи.
Заметим, что описание, указывающее, что цели сравнения, например, длины, позиции, размеры и интервалы одинаковы, включает в себя не только случай, когда они строго одинаковы, но и случай, когда они отличаются в диапазоне, который не отклоняется от сущности изобретения (различаются в диапазоне допуска, заданном, например, на стадии проектирования).
[0013] Система приведения в действие двигателя настоящего варианта осуществления включает в себя: устройство 100 определения формы волны возбуждения; и устройство 200 приведения в действие двигателя. На фиг. 1 показан вид, демонстрирующий один пример функциональной конфигурации устройства 100 определения формы волны возбуждения. На фиг. 2 показан вид, демонстрирующий один пример функциональной конфигурации устройства 200 приведения в действие двигателя. Оборудование устройства 100 определения формы волны возбуждения и устройства 200 приведения в действие двигателя может быть реализовано с использованием, например, процессора (например, CPU), запоминающих устройств (например, главного запоминающего устройства и вспомогательного запоминающего устройства), устройства обработки информации, включающего в себя различные интерфейсные устройства или специализированное оборудование. Заметим, что настоящий вариант осуществления демонстрирует случай, когда устройство 100 определения формы волны возбуждения и устройство 200 приведения в действие двигателя реализованы отдельными фрагментами оборудования. Однако устройство 100 определения формы волны возбуждения и устройство 200 приведения в действие двигателя также могут быть реализованы элементом оборудования (одним устройством).
[0014] Устройство 100 определения формы волны возбуждения
Сначала объясним один пример функций устройства 100 определения формы волны возбуждения. Устройство 100 определения формы волны возбуждения определяет форму волны возбуждения как временную форму волны сигнала возбуждения, который подается на обмотку статора двигателя M для возбуждения двигателя M. Настоящий вариант осуществления демонстрирует случай, когда временная форма волны тока возбуждения определяется как форма волны возбуждения. Однако можно также определять временную форму волны напряжения возбуждения как форму волны возбуждения. Необходимо, чтобы форма волны возбуждения имела только возможность задавать значение в каждый момент времени одного цикла электрического угла. Например, когда форма волны возбуждения устанавливается для выражения значения в каждый момент времени одного цикла электрического угла, значение в каждый момент времени каждого электрического угла выводится из значения формы волны возбуждения. Дополнительно, когда, из значения в каждый момент времени полуцикла электрического угла, выводится, например, значение в каждый момент времени остального полуцикла электрического угла, форма волны возбуждения может устанавливаться для выражения значения в каждый момент времени полуцикла электрического угла.
[0015] Двигатель M
На фиг. 3 показан вид, демонстрирующий один пример конфигурации двигателя M. На фиг. 3, линии со стрелками и символ, проиллюстрированный вблизи x, y и z указывают направления координаты x, координаты y и координаты z в прямоугольной системе координат x-y-z. Заметим, что символ белого кружка (○) с черной точкой (●) посередине указывает направление координаты z. Положительное направление оси z представляет собой направление от дальней стороны к ближней стороне листа бумаги. Дополнительно, на фиг. 3, линии со стрелками и символ, проиллюстрированный вблизи r, θ и z указывают направления координаты r, координаты θ и координаты z в цилиндрической системе координат. Дополнительно, началом каждой из координат является ось 0 вращения (центральная линия), например, двигателя M. Однако на фиг. 3 соответствующие координаты указаны в позициях, отделенных от оси 0 вращения двигателя M, для удобства обозначения.
[0016] На фиг. 3 двигатель M включает в себя ротор 310 и статор 320.
Ротор 310 включает в себя сердечник 311 ротора и постоянные магниты 312a - 312d. Сердечник 311 ротора сформирован пакетированием нескольких листов электротехнической стали, имеющих, например, одинаковую плоскую форму. Заметим, что сердечник 311 ротора не ограничивается тем, который использует листы электротехнической стали, являющиеся одним примером листов магнитно-мягкого материала. Сердечник 311 ротора также может быть, например, порошковым магнитным сердечником, аморфным сердечником и нанокристаллическим сердечником.
На сердечнике 311 ротора сформированы сквозные отверстия 311a - 311i, проходящие через сердечник 311 ротора в направлении, параллельном вращающемуся валу двигателя M (направлению оси z).
[0017] Центральная позиция сквозного отверстия 311a идентична позиции оси 0 вращения двигателя M. В сквозном отверстии 311a располагается вращающийся вал.
Сквозные отверстия 311b - 311e располагаются с интервалом между ними в круговом направлении (направлении θ) двигателя M таким образом, чтобы окружать сквозное отверстие 311a. Формы и размеры сквозных отверстий 311b - 311e одинаковы. В сквозных отверстиях 311b - 311e, располагаются постоянные магниты 312a - 312d. В состоянии, когда постоянные магниты 312a - 312d располагаются в сквозных отверстиях 311b - 311e, по обе стороны каждого из постоянных магнитов 312a - 312d сформированы пустоты. Пустоты являются частичными областями сквозных отверстий 311b - 311e.
[0018] Сквозные отверстия 311f - 311i располагаются в областях на наружной периферийной стороне (стороне положительного направления оси r) двигателя M, относительно сквозных отверстий 311b - 311e. Формы и размеры сквозных отверстий 311f - 311i одинаковы. В сквозных отверстиях 311f - 311i располагаются, например, не показанные заклепки и т.п. для крепления сердечника 311 ротора.
[0019] Несколько листов электротехнической стали, каждый из которых имеет круглую форму, сформированных с отверстиями, соответствующими вышеописанным сквозным отверстиям 311a - 311i, наслаиваются и фиксируются таким образом, чтобы выравнивать позиции отверстий, образуя таким образом сердечник 311 ротора. Заметим, что сквозное отверстие, отличное от сквозных отверстий 311a - 311i, также может быть сформировано на сердечнике 311 ротора. Дополнительно, вместо по меньшей мере одного сквозного отверстия из сквозных отверстий 311b - 311e, другое сквозное отверстие, в котором по меньшей мере одно из его формы, размера и позиции отличается от формы, размера и позиции замененного сквозного отверстия также может быть сформировано на сердечнике 311 ротора. Дополнительно, сердечник 311 ротора также может быть сформирован путем осуществления так называемого перекоса.
[0020] Статор 320 включает в себя сердечник 321 статора и обмотки 322 статора. Сердечник 321 статора сформирован наслоением нескольких листов электротехнической стали, имеющих, например, одинаковую плоскую форму. Заметим, что сердечник 321 статора не ограничивается тем, который использует листы электротехнической стали, являющиеся одним примером листов магнитно-мягкого материала. Сердечник 321 статора также может быть, например, порошковым магнитным сердечником, аморфным сердечником и нанокристаллическим сердечником. Сердечник 321 статора включает в себя несколько участков 321a зубьев и участок 321b ярма (задний участок сердечника). Заметим, что на фиг. 3, ссылочной позицией 321a для удобства обозначения снабжен только один из множества участков зубьев.
[0021] Несколько участков 321a зубьев располагаются с равным интервалом между ними в круговом направлении двигателя M. Формы и размеры нескольких участков 321a зубьев одинаковы. Участок 321b ярма имеет приблизительно пустотелую цилиндрическую форму. Несколько участков 321a зубьев и участок 321b ярма располагаются таким образом, что торцевая поверхность на внутренней периферийной стороне участка 321b ярма и торцевые поверхности на наружной периферийной стороне нескольких участков 321a зубьев подогнаны друг к другу. Однако несколько участков 321a зубьев и участок 321b ярма объединены (граничная линия между ними отсутствует).
[0022] Дополнительно, в пазу 321c располагается обмотка 322 статора. Паз 321c представляет собой область между двумя участками 321a зубьев, соседствующими в состоянии наличия интервала между ними в круговом направлении двигателя M. Заметим, что на фиг. 3, ссылочной позицией 322, для удобства обозначения, снабжена только одна обмотка статора.
[0023] Несколько листов электротехнической стали, каждый из которых имеет круглую форму и обработан для формирования формы, соответствующей нескольким участкам 321a зубьев и участку 321b ярма (пазам), как описано выше, наслаиваются и фиксируются таким образом, что их контуры (внутренний край участка ярма и наружные края нескольких участков зубьев) подогнаны друг к другу, образуя таким образом сердечник 321 статора. Заметим, что сердечник 321 статора также может быть сформирован путем осуществления так называемого перекоса.
[0024] Заметим, что, согласно фиг. 3, настоящий вариант осуществления демонстрирует случай, когда двигатель M является двигателем IPM (с внутренним постоянным магнитом) с внутренним ротором. Однако двигатель M не ограничивается IPM-двигателем с внутренним ротором. Например, двигатель M может быть двигателем, отличным от синхронного двигателя, и также может быть двигателем типа наружного ротора. Дополнительно, двигатель M не ограничивается двигателем типа с радиальным зазором, и также может быть двигателем типа с осевым зазором.
[0025] Блок 101 получения состояния
Блок 101 получения состояния получает различные состояния, необходимые для вычисления для определения формы волны возбуждения в устройстве 100 определения формы волны возбуждения. Блок 101 получения состояния получает по меньшей мере состояние BC основной волны и состояние HC наложения гармоники. Дополнительно, блок 101 получения состояния может также получать рабочее состояние двигателя M.
Состояние BC основной волны является информацией для задания основной волны (синусоидальной волны). Состояние BC основной волны включает в себя, например, амплитуду основной волны и частоту основной волны (основную частоту). Дополнительно, состояние BC основной волны также может включать в себя угол опережения.
[0026] Рабочее состояние двигателя M включает в себя командное значение скорости двигателя M и командное значение крутящего момента двигателя M. Командное значение скорости двигателя M является командным значением скорости вращения двигателя M. Командное значение крутящего момента двигателя M является командным значением крутящего момента двигателя M. Командное значение скорости двигателя M и командное значение крутящего момента двигателя M, полученные блоком 101 получения состояния, являются значениями (предполагаемыми значениями), предполагаемыми как скорость вращения и крутящий момент двигателя M. Скорость вращения двигателя M соответствует основной частоте. Крутящий момент двигателя M соответствует амплитуде и углу опережения тока возбуждения. Соответственно, блок 101 получения состояния может также получать амплитуду и частоту, включенные в состояние BC основной волны, путем вычисления их из рабочего состояния двигателя M. Настоящий вариант осуществления демонстрирует случай, когда блок 101 получения состояния получает состояние BC основной волны путем вычисления его из рабочего состояния двигателя M.
[0027] Заметим, что можно также предписывать устройству 100 определения формы волны возбуждения заранее сохранять поисковую таблицу, где хранятся скорость вращения, крутящий момент и угол опережения двигателя M и амплитуда, основная частота и угол опережения основной волны, например, путем связывания их друг с другом. В таком случае, блок 101 получения состояния считывает амплитуду, основную частоту и угол опережения основной волны из поисковой таблицы, как информацию, соответствующую командному значению скорости двигателя M и командному значению крутящего момента двигателя M. Заметим, что, когда угол опережения является фиксированным, угол опережения может храниться или не храниться в поисковой таблице.
[0028] Состояние HC наложения гармоники является информацией, которая задает гармонику, подлежащую наложению на основную волну. Настоящий вариант осуществления демонстрирует случай, когда состояние HC наложения гармоники включает в себя порядок n гармоники, то есть информацию, которая задает порядок гармоники, подлежащей наложению на основную волну, включенную в форму волны возбуждения. Дополнительно, настоящий вариант осуществления демонстрирует случай, когда блок 101 получения состояния получает положительное целочисленное значение n, большее или равное 2, в качестве порядка n гармоники. Дополнительно, настоящий вариант осуществления демонстрирует случай, когда при получении порядка n гармоники, гармоники соответствующих порядков больших или равных 2 и меньших или равных n, накладываются на основную волну. Например, когда 3 получается в качестве порядка n гармоники (n=3), вторая гармоника и третья гармоника накладываются на основную волну. Однако порядок n гармоники не ограничивается определенными выше. Например, значение n может устанавливаться по одному. Например, можно установить, что, когда 3 получается в качестве порядка n гармоники (n=3), на основную волну накладывается только третья гармоника. Дополнительно, возможно также, что при получении 3 и 5 (n=3, 5), на основную волну накладываются третья гармоника и пятая гармоника. Как описано выше, в настоящем варианте осуществления, можно устанавливать произвольный порядок в качестве порядка гармоники (порядок n гармоники), подлежащей наложению на основную волну.
[0029] Дополнительно, состояние HC наложения гармоники также может включать в себя информацию, которая задает амплитуду каждой гармоники. Однако, в настоящем варианте осуществления, амплитуда каждой гармоники устанавливается в описанном ниже блоке 103 установления возможного решения. Таким образом, устанавливается, что информация, которая задает амплитуду каждой гармоники, не включена в состояние HC наложения гармоники.
[0030] Дополнительно, состояние HC наложения гармоники не обязано включать в себя порядок n гармоники, при условии, что оно является информацией, которая задает гармонику, подлежащую наложению на основную волну. Например, состояние HC наложения гармоники может включать в себя, вместо или помимо порядка n гармоники, информацию, способную задавать порядок n гармоники. Информация, способная задавать порядок n гармоники, например, частоту гармоники n-го порядка (частоту, в n раз превышающую частоту основной волны). Состояние HC наложения гармоники предпочтительно представляет собой информацию, способную задавать порядок n гармоники без осуществления частотного анализа (преобразования Фурье). Дело в том, что вычислительная нагрузка может снижаться. Например, в случае, когда по меньшей мере любой из порядка n гармоники и частоты гармоники n-го порядка включен в состояние HC наложения гармоники, состояние HC наложения гармоники включает в себя информацию, способную задавать порядок n гармоники без осуществления частотного анализа. Однако состояние HC наложения гармоники также может представлять собой информацию, способную задавать порядок n гармоники путем осуществления частотного анализа (преобразования Фурье). Например, состояние HC наложения гармоники также может включать в себя состояние модуляции. Состояние модуляции является информацией, используемой для модуляции основной волны. Состояние модуляции включает в себя, например, по меньшей мере любую из частоты модуляции и количества импульсов на цикл электрического угла.
[0031] Дополнительно, состояние BC основной волны и состояние HC наложения гармоники предпочтительно являются фрагментами информации, которые задают основную частоту и частоту гармоники, соответственно, без осуществления частотного анализа (преобразования Фурье). Дело в том, что вычислительная нагрузка может снижаться. Например, когда состояние BC основной волны включает в себя основную частоту, и состояние HC наложения гармоники включает в себя порядок n гармоники, состояние BC основной волны и состояние HC наложения гармоники включают в себя фрагменты информации, которые задают основную частоту и частоту гармоники, соответственно, без осуществления частотного анализа.
[0032] Блок 101 получения состояния получает, помимо состояния BC основной волны и состояния HC наложения гармоники, информацию, необходимую для выполнения описанного ниже анализа электромагнитного поля. Блок 101 получения состояния получает, например, форму, размер, значение физической характеристики и т.д. двигателя M.
[0033] Как форма получения различных состояний, полученных блоком 101 получения состояния, может быть представлена операция ввода оператором OP пользовательского интерфейса устройства 100 определения формы волны возбуждения. Однако форма получения различных состояний, полученных блоком 101 получения состояния, не ограничивается операцией ввода оператором OP. Например, блок 101 получения состояния может также получать различные состояния путем приема от внешнего устройства или считывания с портативного носителя данных.
[0034] Блок 102 вычисления опорного значения
Блок 102 вычисления опорного значения вычисляет, на основании состояния BC основной волны, полученного блоком 101 получения состояния, опорное значение электромагнитной силы, то есть электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора) двигателя M при возбуждении двигателя M током возбуждения основной волны. Здесь, опорное значение электромагнитной силы обозначено как Fs. Дополнительно, блок 102 вычисления опорного значения вычисляет, на основании состояния BC основной волны, полученного блоком 101 получения состояния, опорное значение крутящего момента, то есть крутящего момента, формируемого в двигателе M при возбуждении двигателя M током возбуждения основной волны. Здесь, опорное значение крутящего момента обозначено как Ts.
[0035] Здесь будет объяснена причина вычисления опорного значения электромагнитной силы Fs.
Как будет описано ниже, блок 104 анализа электромагнитного поля вычисляет расчетное значение электромагнитной силы, то есть электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора) двигателя M при возбуждении двигателя M током возбуждения, полученным наложением гармоники на основную волну. Здесь, расчетное значение электромагнитной силы обозначено как Fc. Главной причиной генерации шума в двигателе M является вибрация статора 320 (сердечника 321 статора). Вибрация статора 320 напрямую определяется электромагнитной силой, формируемой в статоре 320 двигателя M. Дополнительно, когда расчетное значение электромагнитной силы Fc становится меньше, чем опорное значение электромагнитной силы Fs, шум двигателя M снижается больше по сравнению со случаем использования тока возбуждения основной волны. Соответственно, в настоящем варианте осуществления, устанавливается, что оценивается разность (величина разности) между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs. На этом основании, в настоящем варианте осуществления, блок 102 вычисления опорного значения вычисляет опорное значение электромагнитной силы Fs для оценивания разности между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs.
[0036] Далее будет объяснена причина вычисления опорного значения крутящего момента Ts.
Как будет описано ниже, блок 104 анализа электромагнитного поля вычисляет расчетное значение крутящего момента, формируемого в двигателе M при возбуждении двигателя M током возбуждения, полученным наложением гармоники на основную волну. Здесь, расчетное значение крутящего момента обозначено как Tc. Как описано выше, когда расчетное значение электромагнитной силы Fc становится меньше, чем опорное значение электромагнитной силы Fs, шум двигателя M снижается. Однако двигатель M может быть неспособен выводить предполагаемый крутящий момент поскольку гармоника накладывается на основную волну и, таким образом, эффективное значение тока возбуждения уменьшается. С такой точки зрения, предпочтительно, чтобы разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts значительно не отклонялась. На этом основании, в настоящем варианте осуществления, блок 102 вычисления опорного значения вычисляет опорное значение крутящего момента Ts для оценивания разности между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts.
[0037] Блок 102 вычисления опорного значения вычисляет плотность магнитного потока (вектор) B на каждом блоке двигателя M при возбуждении двигателя M током возбуждения основной волны, заданным как описано выше, путем выполнения анализа электромагнитного поля на основании численного анализа. Настоящий вариант осуществления демонстрирует случай, когда для анализа электромагнитного поля используется метод нелинейных переходных конечных элементов, который является одним примером численного анализа. Дополнительно, настоящий вариант осуществления демонстрирует случай, когда вычисляются плотность магнитного потока B и плотность вихревого тока (вектор) Je каждом элементе (ячейке), установленном в отношении расчетной модели двигателя M. Заметим, что для анализа электромагнитного поля можно также использовать метод численного анализа, отличный от метода конечных элементов (метода дискретизации), например, метода разностей.
[0038] В качестве способа анализа электромагнитного поля с использованием метода конечных элементов, предусмотрен способ с использованием метода A-φ. В этом случае, примитивные уравнения для осуществления анализа электромагнитного поля задаются следующими уравнениями (1) - (4), на основании уравнений Максвелла. Заметим, что в каждом уравнении → обозначает вектор.
[0039] Математическое выражение 1
[0040] В уравнениях (1) - (4), μ - магнитная проницаемость, A - векторный потенциал, σ - электропроводность, J0 - плотность тока возбуждения, Je - плотность вихревого тока, и B - плотность магнитного потока. Одновременно решая уравнение (1) и уравнение (2), можно определить векторный потенциал A и скалярный потенциал φ. После этого, из уравнения (3) и уравнения (4), определяются плотность магнитного потока B и плотность вихревого тока Je в отношении каждый элемент. Заметим, что уравнение (1) выражает уравнение для случая, когда x-компонента μx, y-компонента μy и z-компонента μz магнитной проницаемости равны (μx=μy=μz), для упрощения описания.
[0041] В настоящем варианте осуществления, блок 102 вычисления опорного значения вычисляет электромагнитную силу F, формируемую в сердечнике 321 статора, на основании плотности магнитного потока B в каждом элементе, установленном относительно сердечника 321 статора. Дополнительно, блок 102 вычисления опорного значения вычисляет крутящий момент T, формируемый в двигателе M, на основании плотности магнитного потока B в каждом элементе, установленном относительно воздушного зазора между сердечником 311 ротора и сердечником 321 статора. Электромагнитную силу F и крутящий момент T можно вычислять с использованием, например, общеизвестного метода узловых сил. Согласно методу узловых сил, максвелловский тензор напряжений вычисляется на основании плотности магнитного потока B, и максвелловский тензор напряжений используется для вычисления электромагнитной силы (вектора) F, включающей в себя компоненты электромагнитной силы Fr, Fθ и Fz в направлении r, направлении θ и направлении z. Дополнительно, электромагнитная сила Fθ в направлении θ используется для вычисления крутящего момента (вектора) T. Заметим, что способ вычисления электромагнитной силы F и крутящего момента T не ограничивается методом узловых сил, и может применяться любой другой общеизвестный способ.
[0042] Заметим, что здесь представлен случай выполнения трехмерного анализа, но трехмерный анализ не всегда должен выполняться. Например, также может быть выполняться двухмерный анализ в отношении поперечного сечения, полученного разрезанием двигателя M перпендикулярно оси 0 вращения (направлению оси z).
Дополнительно, сам способ осуществления анализа электромагнитного поля является общим способом. Таким образом, подробное объяснение анализа электромагнитного поля будет опущено.
Дополнительно, опорное значение крутящего момента Ts соответствует амплитуде основной волны, что также позволяет вычислять его из основной волны. Таким образом, для вычисления опорного значения крутящего момента Ts не всегда нужно использовать результат анализа электромагнитного поля.
[0043] Блок 103 установления возможного решения
Блок 103 установления возможного решения устанавливает одно или несколько возможных решений по форме волны возбуждения, на основании состояния основной волны и состояния наложения гармоники (порядка n гармоники), полученных блоком 101 получения состояния. Здесь состояние основной волны обозначено как BC. Дополнительно, состояние наложения гармоники обозначено как HC.
В настоящем варианте осуществления, блок 103 установления возможного решения включает в себя блок 103a установления первоначального возможного решения и блок 103b обновления возможного решения.
Блок 103a установления первоначального возможного решения генерирует первоначальную группу возможных решений, сформированную из одного или несколько возможных решений, на основании состояния BC основной волны и состояния HC наложения гармоники (порядка n гармоники), полученных блоком 101 получения состояния. Блок 103b обновления возможного решения устанавливает новую группу возможных решений из введенной в него группы возможных решений. Например, формы волны возбуждения, в которых гармоники порядков n и меньших n накладываются на основную волну, устанавливаются как возможные решения. Здесь, первоначальная группа возможных решений обозначена как IS. Дополнительно, новая группа возможных решений обозначена как US.
[0044] Дополнительно, в настоящем варианте осуществления, блок 103a установления первоначального возможного решения и блок 103b обновления возможного решения установили несколько возможных решений (первоначальную группу IS возможных решений и новую группу US возможных решений) в соответствии с действительнозначным генетическим алгоритмом, который является одним примером метаэвристического метода. Однако также может быть выполняться оптимизационное вычисление на основании метаэвристического метода, отличного от генетического алгоритма. В качестве метаэвристического метода, отличного от генетического алгоритма, могут выступать, например, поиск восхождением к вершине, поиск с запретами, имитация отжига и алгоритм муравьиной колонии.
[0045] Количество возможных решений, включенных в группы возможных решений (первоначальную группу IS возможных решений и новую группу US возможных решений), может определяться алгоритмом оптимизационного вычисления или также может определяться указанием количества, времени вычисления и пр. Пользователем. Когда номер порядка гармоники, заданный порядком n гармоники, включенным в состояние HC наложения гармоники, равен единице, блок 103a установления первоначального возможного решения и блок 103b обновления возможного решения устанавливают временную форму волны, полученную наложением временной формы волны основной волны на временную форму волны гармоники порядка, как одно из возможных решений. Когда номер порядка гармоники, заданный порядком n гармоники, включенным в состояние HC наложения гармоники, больше или равен двум, блок 103a установления первоначального возможного решения и блок 103b обновления возможного решения устанавливают временную форму волны, полученную наложением временной формы волны основной волны на временную форму волны в результате суммирования временных форм волны двух или более номеров гармоник, как одно из возможных решений. Одно возможное решение включает в себя информацию, которая задает значение (текущее значение) в каждый момент времени одного цикла электрического угла.
[0046] Блок 103a установления первоначального возможного решения устанавливает порядок, заданный порядком n гармоники, в качестве порядка гармоники. Дополнительно, блок 103a установления первоначального возможного решения устанавливает параметр за исключением порядка гармоники, например, произвольным образом. Блок 103a установления первоначального возможного решения вычисляет первоначальное возможное решение на основании порядка гармоники и параметра за исключением порядка гармоники. Блок 103a установления первоначального возможного решения вычисляет несколько первоначальных возможных решений, различия порядок гармоники и содержание параметра за исключением порядка гармоники. Блок 103a установления первоначального возможного решения устанавливает несколько первоначальных возможных решений как первоначальную группу IS возможных решений. Дополнительно, блок 103b обновления возможного решения устанавливает возможные решения при повторной обработке второй раз и последующего применения генетического алгоритма, в качестве новых возможных решений. В это время, блок 103b обновления возможного решения выбирает, из нескольких возможных решений, включенных в текущую группу возможных решений, введенных в блок 103b обновления возможного решения, заранее определенное количество возможных решений в восходящем порядке значения оценочной функции J в уравнении (5), вычисленном блоком 105a оценки, например, описанным ниже, в качестве новых возможных решений US. В это время, блок 103b обновления возможного решения выбирает только возможные решения, которые удовлетворяют ограничительному уравнению (6) вычисленному блоком 105a оценки, описанным ниже. В частности, блок 103b обновления возможного решения размещает возможные решения, которые удовлетворяют ограничительному уравнению (6) в восходящем порядке значения оценочной функции J в уравнении (5), и выбирает только заранее определенное количество размещенных возможных решений в восходящем порядке значения оценочной функции J.
[0047] Затем блок 103b обновления возможного решения выполняет кроссинговер или мутацию. Блок 103b обновления возможного решения устанавливает выбранное заранее определенное количество возможных решений и возможные решения, генерируемые посредством кроссинговера или мутации, как новую группу US возможных решений (группу возможных решений нового поколения). Новая группа US возможных решений, сгенерированных посредством кроссинговера или мутации, также генерируется на основании состояния BC основной волны и состояния HC наложения гармоники (порядка n гармоники), полученных блоком 101 получения состояния. Как описано выше, одно возможное решение включает в себя значение (текущее значение) в каждый момент времени одного цикла электрического угла.
[0048] Настоящий вариант осуществления демонстрирует случай, когда возможное решение, как описано выше, является возможным решением временной формы волны тока возбуждения. На фиг. 4 показан вид, демонстрирующий один пример временной формы волны тока 401 возбуждения. Согласно фиг. 4, временная форма волны (форма волны возбуждения) тока 401 возбуждения становится временной формой волны, в которой гармоника накладывается на основную волну.
[0049] Блок 104 анализа электромагнитного поля
Блок 104 анализа электромагнитного поля выводит плотность магнитного потока B и плотность вихревого тока Je в двигателе M при возбуждении двигателя M каждым возможным решением формы волны возбуждения (тока возбуждения), включенным в группы возможных решений (первоначальную группу IS возможных решений и новую группу US возможных решений), установленные блоком 103 установления возможного решения, путем выполнения анализа электромагнитного поля на основании уравнений Максвелла. Дополнительно, блок 104 анализа электромагнитного поля вычисляет, на основании плотности магнитного потока B в каждом элементе, установленном относительно сердечника 321 статора, электромагнитную силу F, формируемую в статоре 320 (сердечнике 321 статора), в качестве расчетного значения электромагнитной силы Fc. Дополнительно, блок 104 анализа электромагнитного поля вычисляет, на основании плотности магнитного потока B в каждом элементе, установленном относительно воздушного зазора между сердечником 311 ротора и сердечником 321 статора, крутящий момент T, формируемый в двигателе M в качестве расчетного значения крутящего момента Tc. Один пример способа вычисления плотности магнитного потока B, плотности вихревого тока Je, электромагнитной силы и крутящего момента объяснен в разделе "Блок 102 вычисления опорного значения", и поэтому подробное объяснение способа вычисления будет здесь опущено.
Заметим, что настоящий вариант осуществления демонстрирует случай, когда каждое из опорного значения электромагнитной силы Fs и расчетного значения электромагнитной силы Fc выражается вектором электромагнитной силы (вектором, определенным компонентой в круговом направлении и компонентой в радиальном направлении). Однако, он не обязательно сконструирован, как описано выше. Например, каждое из опорного значения электромагнитной силы Fs и расчетного значения электромагнитной силы Fc также может быть выражено с использованием только компоненты в радиальном направлении.
[0050] Блок 105 определения формы волны возбуждения
Блок 105 определения формы волны возбуждения определяет форму волны возбуждения из первоначальной группы IS возможных решений или новой группы US возможных решений, установленной блоком 103 установления возможного решения, на основании результата выполнения анализа электромагнитного поля блоком 104 анализа электромагнитного поля. В частности, когда блок 105 определения формы волны возбуждения может определять (выбирать) форму волны возбуждения из первоначальной группы IS возможных решений, блок 103 установления возможного решения не устанавливает новую группу US возможных решений. С другой стороны, когда блок 105 определения формы волны возбуждения не может определять форму волны возбуждения из первоначальной группы IS возможных решений, блок 103 установления возможного решения последовательно генерирует новые группы US возможных решений путем обновления первоначальной группы IS возможных решений. Блок 105 определения формы волны возбуждения определяет (выбирает) форму волны возбуждения из новых групп US возможных решений, последовательно генерируемых блоком 103 установления возможного решения. В настоящем варианте осуществления, блок 105 определения формы волны возбуждения включает в себя блок 105a оценки и блок 105b определения.
[0051] Блок 105a оценки
Блок 105a оценки вычисляет значение индекса оценки, включающего в себя индекс оценки электромагнитной силы для оценивания значения электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора), на основании результата выполнения анализа электромагнитного поля блоком 104 анализа электромагнитного поля. Дополнительно, в настоящем варианте осуществления, блок 105a оценки дополнительно вычисляет, в качестве индекса оценки, значение индекса оценки крутящего момента для оценивания значения крутящего момента, формируемого в статоре 320 (сердечнике 321 статора), на основании результата выполнения анализа электромагнитного поля блоком 104 анализа электромагнитного поля.
Как описано выше, в настоящем варианте осуществления, когда расчетное значение электромагнитной силы Fc, вычисленное блоком 104 анализа электромагнитного поля, становится меньше, чем опорное значение электромагнитной силы Fs, вычисленное блоком 102 вычисления опорного значения, шум двигателя M снижается, и, таким образом, представлен случай, когда индекс оценки разности между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs устанавливается равным индексу оценки электромагнитной силы. Дополнительно, в настоящем варианте осуществления, предпочтительно, чтобы расчетное значение крутящего момента Tc, вычисленное блоком 104 анализа электромагнитного поля, значительно не отклонялось от опорного значения крутящего момента Ts вычисленного блоком 102 вычисления опорного значения, и, таким образом, представлен случай, когда индекс оценки разности между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts устанавливается равным индексу оценки крутящего момента.
[0052] Здесь, электромагнитная сила вычисляется как вектор, и, таким образом, величина расчетного значения электромагнитной силы Fc обозначено как |Fc|. Аналогичным образом, величина опорного значения электромагнитной силы Fs обозначено как |Fs|. Дополнительно, крутящий момент также вычисляется как вектор, и, таким образом, величина расчетного значения крутящего момента Tc обозначена как |Tc|. Аналогичным образом, величина опорного значения крутящего момента Ts обозначена как |Ts|. Настоящий вариант осуществления демонстрирует случай, когда разность между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs оценивается значением оценочной функции J в следующем уравнении (5). Дополнительно, представлен случай, когда разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts оценивается ограничительным уравнением следующего уравнения (6).
[0053] Математическое выражение 2

[0054] В уравнении (5) символ min. указывает производительность вычисления минимального значения J. Дополнительно, в уравнении (6), ε - заранее установленное положительное значение. Когда значение ε чрезмерно велико, возможное решение, имеющее большую разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts, выбирается с наибольшей вероятностью. С другой стороны, когда значение ε чрезмерно мало, отыскание решения может оказаться невозможно (может возникать так называемое отсутствие решения). С такой точки зрения, ε заранее устанавливается.
В настоящем варианте осуществления, каждое из значения в правой стороне уравнения (5) и значения в левой стороне уравнения (6) является одним примером значения индекса оценки. Дополнительно, правая сторона уравнения (5) является одним примером индекса оценки электромагнитной силы, и левая сторона уравнения (6) является одним примером индекса оценки крутящего момента.
[0055] Когда значения индексов оценки вычисляются блоком 105a оценки вышеописанным образом, блок 103b обновления возможного решения размещает возможные решения, которые удовлетворяют ограничительному уравнению (6) в восходящем порядке значения оценочной функции J в уравнении (5), и выбирает только заранее определенное количество размещенных возможных решений в восходящем порядке значения оценочной функции J, как описано выше. Затем блок 103b обновления возможного решения выполняет кроссинговер или мутацию. Блок 103b обновления возможного решения устанавливает выбранное заранее определенное количество возможных решений и возможные решения, генерируемые посредством кроссинговера или мутации, как новую группу US возможных решений (группу возможных решений нового поколения).
[0056] Обработка в блоке 103b обновления возможного решения, блоке 104 анализа электромагнитного поля и блоке 105a оценки неоднократно выполняется, пока не будет выполнено заранее определенное условие окончания вычисления. Блок 103b обновления возможного решения выводит возможное решение при выполнении заранее определенного условия окончания вычисления, на блок 105b определения. Здесь, возможное решение при выполнении заранее определенного условия окончания вычисления обозначено как ES. Настоящий вариант осуществления демонстрирует случай, когда выполняется оптимальное вычисление на основании действительнозначного генетического алгоритма. Таким образом, в качестве условия окончания вычисления, в общем случае используется состояние, применяемое в способе генетического алгоритма, благодаря чему, например, чередование поколений осуществляется заранее определенное количество раз, или разность между возможным решением последнего раза и возможным решением этого раза удовлетворяет заранее определенному условию (возможное решение не изменилось, например, между последним разом и этим разом).
Заметим, что сам генетический алгоритм может быть реализован общеизвестной техникой, и поэтому его подробное объяснение будет здесь опущено.
[0057] Блок 105b определения
Блок 105b определения определяет форму волны возбуждения на основании значения индекса оценки, вычисленного блоком 105a оценки.
Блок 105b определения устанавливает, из возможных решений ES при выполнении заранее определенного условия окончания вычисления, возможное решение, имеющее минимальное значение оценочной функции J в уравнении (5), как оптимальное решение, и вычисляет (определяет) форму волны возбуждения заданный из возможного решения, как оптимальное решение формы волны возбуждения. Оптимальное решение формы волны возбуждения включает в себя информацию, которая задает значение (текущее значение) в каждый момент времени одного цикла электрического угла. В нижеприведенном объяснении информация, которая задает значение (текущее значение) в каждый момент времени одного цикла электрического угла также именуется информацией задания оптимальной формы волны.
[0058] Обработка для каждого состояния BC основной волны (рабочего состояния двигателя M)
Обработка блоком 102 вычисления опорного значения, блоком 103 установления возможного решения, блоком 104 анализа электромагнитного поля и блоком 105 определения формы волны возбуждения выполняется для каждого из одного или нескольких состояний BC основной волны, полученных блоком 101 получения состояния. Как описано выше, состояние BC основной волны включает в себя амплитуду и частоту (основную частоту) основной волны. Дополнительно, состояние BC основной волны также может включать в себя угол опережения. Скорость вращения двигателя M соответствует основной частоте. Крутящий момент двигателя M соответствует амплитуде и углу опережения тока возбуждения. Таким образом, выполнение обработки блоком 102 вычисления опорного значения, блоком 103 установления возможного решения, блоком 104 анализа электромагнитного поля и блоком 105 определения формы волны возбуждения для каждого из одного или нескольких состояний BC основной волны, соответствует выполнению обработки для каждого из одного или нескольких рабочих состояний (частоты вращения, крутящего момента и т.д.) двигателя M. Заметим, что, когда номер состояния BC основной волны (рабочего состояния двигателя M), полученного блоком 101 получения состояния равен единице, обработка блоком 102 вычисления опорного значения, блоком 103 установления возможного решения, блоком 104 анализа электромагнитного поля и блоком 105 определения формы волны возбуждения может выполняться в отношении только состояния BC основной волны (рабочего состояния).
[0059] Блок 106 вывода
Блок 106 вывода выводит оптимальное решение формы волны возбуждения (информацию задания оптимальной формы волны), определенное блоком 105b определения. В качестве формы вывода информации задания оптимальной формы волны представлена передача на устройство 200 приведения в действие двигателя. Связь между устройством 100 определения формы волны возбуждения и устройством 200 приведения в действие двигателя может быть проводной связью или беспроводной связью. Дополнительно, форма вывода информации задания оптимальной формы волны не ограничивается передачей на устройство 200 приведения в действие двигателя. Например, блок 106 вывода может сохранять информацию задания оптимальной формы волны на внутреннем или внешнем носителе данных устройства 100 определения формы волны возбуждения или может отображать информацию на компьютерном дисплее.
[0060] Устройство 200 приведения в действие двигателя
Далее, один пример функций устройства 200 приведения в действие двигателя будет описан. Устройство 200 приведения в действие двигателя приводит в действие двигатель M на основании формы волны возбуждения, определенной устройством 100 определения формы волны возбуждения.
Блок 201 хранения формы волны возбуждения
Блок 201 хранения формы волны возбуждения сохраняет информацию задания оптимальной формы волны, определенную устройством 100 определения формы волны возбуждения, для каждого рабочего состояния двигателя M. Как описано выше, рабочее состояние двигателя M включает в себя командное значение скорости двигателя M и командное значение крутящего момента двигателя M. Заметим, что блок 201 хранения формы волны возбуждения также может быть обеспечен вне устройства 200 приведения в действие двигателя. Дополнительно, устройство 100 определения формы волны возбуждения определяет информацию задания оптимальной формы волны для каждого из одного или нескольких состояний BC основной волны. Как описано выше, определение информации задания оптимальной формы волны для каждого из одного или нескольких состояний BC основной волны эквивалентно определению информации задания оптимальной формы волны для каждого из одного или нескольких рабочих состояний двигателя M. Таким образом, хранение информации задания оптимальной формы волны, определенной устройством 100 определения формы волны возбуждения для каждого рабочего состояния двигателя M, эквивалентно хранению информации задания оптимальной формы волны, определенной устройством 100 определения формы волны возбуждения для каждого состояния BC основной волны.
[0061] Блок 202 получения рабочего состояния
Блок 202 получения рабочего состояния получает, в качестве рабочего состояния при работе двигателя M, новое рабочее состояние, отличное от текущего рабочего состояния. Предполагается, что в начале работы двигателя M, текущего рабочего состояния не существует. Таким образом, в начале работы двигателя M, блок 202 получения рабочего состояния получает рабочее состояние в начале работы двигателя M как новое рабочее состояние. Как описано выше, рабочее состояние двигателя M включает в себя командное значение скорости двигателя M и командное значение крутящего момента двигателя M. Блок 202 получения рабочего состояния получает рабочее состояние при работе двигателя M, например, от устройства 210 управления. Здесь, рабочее состояние при работе двигателя M обозначено как OC. Устройство 210 управления может генерировать командное значение крутящего момента в соответствии с разностью между фактически измеренным значением и целевым значением крутящего момента двигателя M, или оно также может генерировать командное значение скорости, например, в соответствии с разностью между фактически измеренным значением и целевым значением скорости вращения двигателя M. Заметим, что блок 202 получения рабочего состояния не всегда должен получать рабочее состояние OC при работе двигателя M от устройства 210 управления. Например, рабочее состояние OC при работе двигателя M также может быть ранее установлено (запланировано). В таком случае, блок 202 получения рабочего состояния может также получать установленное рабочее состояние на основании, например, операции ввода оператором пользовательского интерфейса устройства 200 приведения в действие двигателя.
[0062] Блок 203 получения формы волны возбуждения
Блок 203 получения формы волны возбуждения получает информацию задания оптимальной формы волны, соответствующую рабочему состоянию OC при работе двигателя M полученный блоком 202 получения рабочего состояния, из фрагментов информации задания оптимальной формы волны для каждого из рабочих состояний двигателя M, хранящихся в блоке 201 хранения формы волны возбуждения.
[0063] Блок 204 генерации сигнала возбуждения
Блок 204 генерации сигнала возбуждения генерирует ток возбуждения для возбуждения двигателя M, на основании информации задания оптимальной формы волны, полученной блоком 203 получения формы волны возбуждения. Например, когда устройство 200 приведения в действие двигателя выполняет управление PWM (широтно-импульсной модуляции), блок 204 генерации сигнала возбуждения выполняет, например, следующую обработку. Сначала блок 204 генерации сигнала возбуждения генерирует модулированную волну на основании информации задания оптимальной формы волны. Затем блок 204 генерации сигнала возбуждения сравнивает сгенерированную модулированную волну с заранее определенной несущей волной (например, треугольной волной) для генерации импульсного сигнала, и подает импульсный сигнал на обмотку 322 статора двигателя M. Заметим, что способ генерации тока возбуждения не ограничивается способом на основании управления PWM, и он может быть другим общеизвестным способом (например, способом на основании управления PAM (амплитудно-импульсной модуляции)). Дополнительно, блок 204 генерации сигнала возбуждения может напрямую подавать ток возбуждения, заданный информацией задания оптимальной формы волны, на двигатель M. Дополнительно, блок 204 генерации сигнала возбуждения может преобразовывать ток возбуждения заданный информацией задания оптимальной формы волны в напряжение возбуждения с использованием импеданса двигателя M, и затем подавать напряжение возбуждения на двигатель M.
[0064] Блок-схема операций
Далее, один пример способа определения формы волны возбуждения настоящего варианта осуществления с использованием устройства 100 определения формы волны возбуждения, будет объяснен со ссылкой на блок-схему операций на фиг. 5. Блок-схема операций на фиг. 5 может быть реализована посредством обработки, включающей в себя выполнение программы, хранящейся в запоминающем устройстве устройства 100 определения формы волны возбуждения, например, процессором устройства 100 определения формы волны возбуждения.
Сначала, на этапе S501, блок 101 получения состояния получает различные состояния, необходимые для вычисления для определения формы волны возбуждения в устройстве 100 определения формы волны возбуждения. Состояния включают в себя состояние BC основной волны, и состояние HC наложения гармоники. Настоящий вариант осуществления демонстрирует случай, когда блок 101 получения состояния вычисляет состояние BC основной волны на основании рабочего состояния двигателя M, чтобы, таким образом, получать состояние BC основной волны. Рабочее состояние двигателя M включает в себя командное значение скорости двигателя M и командное значение крутящего момента двигателя M.
Далее, на этапе S502, блок 101 получения состояния выбирает, из состояний BC основной волны (рабочих состояний двигателя M), полученных на этапе S501, одно состояние BC основной волны, которое не выбрано на этом этапе S502.
[0065] Далее, на этапе S503, блок 102 вычисления опорного значения вычисляет опорное значение электромагнитной силы Fs, то есть электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора) двигателя M при возбуждении двигателя M током возбуждения основной волны, определенным из состояния BC основной волны, выбранного на этапе S502, и опорное значение крутящего момента Ts, то есть крутящего момента, формируемого в двигателе M при возбуждении двигателя M током возбуждения основной волны, путем выполнения анализа электромагнитного поля в отношении двигателя M.
[0066] Далее, на этапе S504, блок 103a установления первоначального возможного решения устанавливает первоначальную группу IS возможных решений, то есть начальное значение группы возможных решений, сформированной из нескольких возможных решений по форме волны возбуждения.
Далее, на этапе S505, блок 104 анализа электромагнитного поля вычисляет расчетное значение электромагнитной силы Fc, то есть электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора) двигателя M при возбуждении двигателя M формой волны возбуждения (током возбуждения), заданной возможным решением, установленным на этапе S103, и расчетное значение крутящего момента Tc, то есть крутящего момента, формируемого в двигателе M при возбуждении двигателя M формой волны возбуждения (током возбуждения), путем выполнения анализа электромагнитного поля в отношении двигателя M. Блок 104 анализа электромагнитного поля выполняет вышеописанное вычисление расчетного значения электромагнитной силы Fc и расчетного значения крутящего момента Tc для каждого возможного решения, включенного в первоначальную группу IS возможных решений.
[0067] Далее, на этапе S506, блок 105a оценки вычисляет значение индекса оценки, который оценивает разность между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs, и значение индекса оценки, который оценивает разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts. В частности, блок 105a оценки вычисляет значение оценочной функции J (= |Fc| - |Fs|) в уравнении (5), и значение левой стороны (= ||Ts| - |Tc||) в уравнении (6).
[0068] Далее, на этапе S507, блок 103b обновления возможного решения обновляет группу возможных решений для установления новой группы US возможных решений. В частности, блок 103 установления возможного решения размещает возможные решения, которые удовлетворяют ограничительному уравнению (6) в восходящем порядке значения оценочной функции J в уравнении (5), и выбирает только заранее определенное количество размещенных возможных решений в восходящем порядке значения оценочной функции J. Затем блок 103b обновления возможного решения выполняет кроссинговер или мутацию. Блок 103b обновления возможного решения устанавливает выбранное заранее определенное количество возможных решений, и возможные решения, генерируемые посредством кроссинговера или мутации, как новую группу US возможных решений (группа возможных решений нового поколения).
[0069] Далее, на этапе S508, блок 105b определения решает, выполняется ли условие окончания вычисления. Когда, в результате этого решения, условие окончания вычисления не выполняется (Нет на этапе S508), обработка на этапе S505 выполняется повторно. В этом случае, на этапе S505, используется не первоначальная группа возможных решений, установленная на этапе S504, но новая группа US возможных решений, обновленная на этапе S507.
[0070] Когда, в результате решения на этапе S508, условие окончания вычисления выполняется (Да на этапе S508), выполняется обработка на этапе S509. На этапе S509, блок 105b определения устанавливает, из возможных решений ES при выполнении условия окончания вычисления, возможное решение, имеющее минимальное значение оценочной функции J в уравнении (5), как оптимальное решение, и вычисляет (определяет) форму волны возбуждения заданный из возможного решения, как оптимальное решение формы волны возбуждения. Дополнительно, блок 105b определения генерирует информацию, которая задает значение (текущее значение) в каждый момент времени одного цикла электрического угла, включенного в оптимальное решение формы волны возбуждения, в качестве информации задания оптимальной формы волны.
[0071] Далее, на этапе S510, блок 106 вывода выводит информацию задания оптимальной формы волны, генерируемую на этапе S509, на устройство 200 приведения в действие двигателя.
Далее, на этапе S511, устройство 100 определения формы волны возбуждения решает, сгенерирована ли информация задания оптимальной формы волны в отношении всех состояний BC основной волны (рабочих состояний двигателя M), полученных на этапе S501. Когда, в результате этого решения, информация задания оптимальной формы волны не была сгенерирована в отношении всех состояний BC основной волны (рабочих состояний двигателя M), полученных на этапе S501 (Нет на этапе S511), обработка на этапе S502 выполняется повторно. Дополнительно, когда информация задания оптимальной формы волны сгенерирована в отношении всех состояний BC основной волны (рабочих состояний двигателя M), полученных на этапе S501 (Да на этапе S511), обработка согласно блок-схеме операций на фиг. 5 заканчивается.
[0072] Далее, один пример способа приведения в действие двигателя настоящего варианта осуществления с использованием устройства 200 приведения в действие двигателя, будет объяснен со ссылкой на блок-схему операций на фиг. 6. Заметим, что здесь, предполагается, что фрагменты информации задания оптимальной формы волны, касающиеся состояний BC основной волны, соответствующих всем рабочим состояниям, которые можно рассматривать как рабочие состояния двигателя M, сохраняются в блоке 201 хранения формы волны возбуждения до начала блок-схемы операций на фиг. 6. Блок-схема операций на фиг. 6 может быть реализована посредством обработки, включающей в себя выполнение программы, хранящейся, например, в запоминающем устройстве устройства 200 приведения в действие двигателя процессором устройства 200 приведения в действие двигателя.
[0073] Сначала, на этапе S601, блок 202 получения рабочего состояния решает, получено ли рабочее состояние, отличное от текущего рабочего состояния, как рабочее состояние OC при работе двигателя M. Когда, в результате этого решения, рабочее состояние OC при работе двигателя M не получено (Нет на этапе S601), блок 202 получения рабочего состояния ожидает получения рабочего состояния OC при работе двигателя M. Дополнительно, когда рабочее состояние OC при работе двигателя M получено (Да на этапе S601), выполняется обработка на этапе S602.
[0074] На этапе S602, устройство 200 приведения в действие двигателя решает, подлежит ли завершению работа двигателя M, на основании рабочего состояния OC при работе двигателя M. Когда, в результате этого решения, работа двигателя M не подлежит завершению (Нет на этапе S602), выполняется обработка на этапе S603. На этапе S603, блок 203 получения формы волны возбуждения получает информацию задания оптимальной формы волны, соответствующую рабочему состоянию OC при работе двигателя M полученный блоком 202 получения рабочего состояния, из фрагментов информации задания оптимальной формы волны для соответствующих состояний BC основной волны (рабочих состояний двигателя M), хранящихся в блоке 201 хранения формы волны возбуждения.
[0075] Далее, на этапе S604, блок 204 генерации сигнала возбуждения генерирует ток возбуждения для возбуждения двигателя M, на основании информации задания оптимальной формы волны, полученной на этапе S603, и подает ток возбуждения на двигатель M.
[0076] Когда, в результате решения на вышеописанном этапе S602, работа двигателя M подлежит завершению (Да на этапе S604), выполняется обработка на этапе S605. На этапе S605 блок 204 генерации сигнала возбуждения останавливает подачу тока возбуждения на двигатель M. Когда обработка на этапе S605 заканчивается, обработка согласно блок-схеме операций на фиг. 6 заканчивается.
[0077] Оборудование устройства 100 определения формы волны возбуждения
Далее будет объяснен один пример оборудования устройства 100 определения формы волны возбуждения. На фиг. 7, устройство 100 определения формы волны возбуждения включает в себя CPU 701, главное запоминающее устройство 702, вспомогательное запоминающее устройство 703, схему 704 связи, схему 705 обработки сигнала, схему 706 обработки изображений, схему 707 I/F, пользовательский интерфейс 708, дисплей 709 и шину 710.
[0078] CPU 701 полностью управляет всем устройством 100 определения формы волны возбуждения. CPU 701 использует главное запоминающее устройство 702 в качестве рабочей зоны для выполнения программы, хранящейся во вспомогательном запоминающем устройстве 703. Главное запоминающее устройство 702 сохраняет данные временно. Вспомогательное запоминающее устройство 703 сохраняет различные виды данных, помимо программы, выполняемой CPU 701.
[0079] Схема 704 связи является схемой для осуществления связи с периферией устройства 100 определения формы волны возбуждения. Схема 704 связи может осуществлять беспроводную связь или проводную связь с периферией устройства 100 определения формы волны возбуждения.
[0080] Схема 705 обработки сигнала осуществляет различные виды обработки сигнала на сигнале, принятом схемой 704 связи, или сигнале, вводимом под управлением CPU 701.
Схема 706 обработки изображений осуществляет различные виды обработки изображений на сигнале, вводимом под управлением CPU 701. После того, как сигнал подвергается этой обработке изображений, он выводится, например, на дисплей 709.
Пользовательский интерфейс 708 является блоком, с помощью которого оператор OP выдает команды на устройство 100 определения формы волны возбуждения. Пользовательский интерфейс 708 включает в себя, например, кнопку, переключатель, поворотный регулятор и пр. Дополнительно, пользовательский интерфейс 708 может включать в себя графический пользовательский интерфейс который использует дисплей 709.
[0081] Дисплей 709 отображает изображение на основании сигнала, выводимого из схемы 706 обработки изображений. Схема 707 I/F обменивается данными с устройством, подключенным к схеме 707 I/F. На фиг. 7, пользовательский интерфейс 708 и дисплей 709 указаны как устройства, подключенные к схеме 707 I/F. Однако устройство, подключенное к схеме 707 I/F, этим не ограничивается. Например, к схеме 707 I/F может быть подключен портативный носитель данных. Дополнительно, по меньшей мере часть пользовательского интерфейса 708 и дисплея 709 также может быть обеспечена вне устройства 100 определения формы волны возбуждения.
[0082] Заметим, что CPU 701, главное запоминающее устройство 702, вспомогательное запоминающее устройство 703, схема 705 обработки сигнала, схема 706 обработки изображений и схема 707 I/F подключены к шине 710. Связь между этими компонентами осуществляется через шину 710. Дополнительно, оборудование устройства 200 приведения в действие двигателя может быть реализовано, например, в разделе "оборудование устройства 100 определения формы волны возбуждения" и на фиг. 7, где устройство 100 определения формы волны возбуждения заменено устройством 200 приведения в действие двигателя. Таким образом, подробное объяснение оборудования устройства 200 приведения в действие двигателя будет опущено. Дополнительно, оборудование устройства 100 определения формы волны возбуждения и устройства 200 приведения в действие двигателя не ограничивается оборудованием, проиллюстрированным на фиг. 7, при условии, что можно реализовать функции вышеописанных устройства 100 определения формы волны возбуждения и устройства 200 приведения в действие двигателя. Например, вместо или помимо CPU 701, в качестве процессора также может использоваться GPU.
[0083] Пример вычисления
Далее будет объяснен пример вычисления. В этом примере вычисления, численный анализ выполнялся с использованием IPM-двигателя с внутренним ротором в качестве двигателя цели вычисления. Типичная спецификация IPM-двигателя такова.
Наружный диаметр статора: 140 мм
Наружный диаметр ротора: 88,4 мм
Высота (толщина наслоения сердечника): 24 мм
Количество пазов стартера: 48
Количество полюсов: 8
В таблице 1 приведены результаты этого примера вычисления. Заметим, что в таблице 1, значения электромагнитной силы и крутящего момента являются безразмерными значениями, будучи относительными значениями за счет того, что максимальные значения электромагнитной силы и крутящего момента соответственно установлены равными единице.
[0084] Таблица 1
(об/мин)
(-)
сила (-)
число (%)
[0085] В таблице 1, opt (пример изобретения) указывает, что IPM-двигатель возбуждался оптимальным решением формы волны возбуждения (тока возбуждения), вычисленной способом настоящего варианта осуществления. sin (сравнительный пример) указывает, что IPM-двигатель возбуждался основной волной (тока возбуждения), используемой при вычислении оптимального решения формы волны возбуждения. В объяснении этого примера вычисления, оптимальное решение формы волны возбуждения (тока возбуждения), вычисленной способом настоящего варианта осуществления, также именуется opt ток. Дополнительно, основная волна (ток возбуждения), используемая при вычислении оптимального решения формы волны возбуждения, также именуется sin ток.
[0086] Частота вращения является частотой вращения IPM-двигателя (ротора). Электромагнитная сила является электромагнитной силой, формируемой в сердечнике статора. Крутящий момент является крутящим моментом, формируемым в IPM-двигателе. Передаточное число является передаточным числом электромагнитной силы, формируемой в IPM-двигателе при возбуждении IPM-двигателя opt током к электромагнитной силе, формируемой в IPM-двигателе при возбуждении IPM-двигателя sin током. В частности, передаточное число вычисляется путем выполнения вычисления (sin - opt) ÷ sin × 100. В этом выражении opt это электромагнитная сила, формируемая в IPM-двигателе при возбуждении IPM-двигателя opt током. Sin это электромагнитная сила, формируемая в IPM-двигателе при возбуждении IPM-двигателя sin током.
[0087] Из таблицы 1, можно понять, что электромагнитная сила в opt (пример изобретения) снижается больше, чем в sin (сравнительный пример), в каждом из состояний 1-4. Дополнительно, можно понять, что в рабочем состоянии наподобие состояния 1, в котором частота вращения и крутящий момент малы, и, таким образом, вибрация IPM-двигателя не растет, эффект снижения электромагнитной силы не растет. Дополнительно, если сравнивать состояния 1 и 2, можно понять, что чем больше крутящий момент, тем больше эффект снижения электромагнитной силы. Дополнительно, если сравнивать состояния 1, 3 и 4, можно понять, что чем выше частота вращения, тем больше эффект снижения электромагнитной силы. Из вышесказанного можно понять, что в этом примере вычисления, с ростом крутящего момента и частоты вращения, можно ожидать усиления эффекта снижения электромагнитной силы.
[0088] Соответственно, блок 106 вывода (фиг. 1) также могут выводить форму волны возбуждения на основании частоты вращения и крутящего момента. В частности, когда выполняется заранее определенное условие вывода, блок 106 вывода может выводить возможное решение ES при выполнении условия окончания вычисления. Заранее определенное условие вывода представляет собой, например, условие, определенное между следующими тремя состояниями. Первым условием является условие частоты вращения, указывающее, что частота вращения двигателя M является заранее определенной частотной вращения или более. Вторым условием является условие крутящего момента, указывающее, что крутящий момент двигателя M является заранее определенным крутящим моментом или более. Третьим условием является условие, указывающее, что условие частоты вращения и условие крутящего момента оба выполняются (условие, указывающее, что частота вращения двигателя M является заранее определенной частотой вращения или более, и крутящий момент двигателя M является заранее определенным крутящим моментом или более). Дополнительно, когда заранее определенное условие вывода не выполняется, блок 106 вывода может не выводить возможное решение и может выводить информацию, указывающую, например, что условие вывода не выполняется. Если устройство 200 приведения в действие двигателя сконструировано, как описано выше, например (на фиг. 2), оно может использовать форму волны возбуждения, определенную устройством 100 определения формы волны возбуждения в диапазоне в соответствии с по меньшей мере любым из условия частоты вращения и условия крутящего момента. Таким образом, возможно также, что устройство 200 приведения в действие двигателя использует форму волны возбуждения, определенную устройством 100 определения формы волны возбуждения, только при сильном эффекте подавления вибрации двигателя M, при приведении в действие двигателя M. Например, когда блок 204 генерации сигнала возбуждения генерирует форму волны возбуждения с использованием инвертора, например, PWM-инвертора, форма волны возбуждения, подлежащая генерации, может усложняться. В этом случае, переключение инвертора увеличивается, что может увеличивать потери. Таким образом, когда эффект подавления вибрации двигателя M слаб или вовсе почти не существует, устройство 200 приведения в действие двигателя может приводить в действие двигатель M на основании нормальной формы волны возбуждения. Заметим, что устройство 100 определения формы волны возбуждения может проверять, выполняется ли условие крутящего момента, на основании опорного значения крутящего момента Ts, выводимого, например, из блока 102 вычисления опорного значения. В таком случае, устройство 100 определения формы волны возбуждения может исключать возможное решение, которое не удовлетворяет условию крутящего момента, например, из предлагаемого оптимального решения. Таким образом, можно снизить нагрузку устройства 100 определения формы волны возбуждения. Дополнительно, блок 203 получения формы волны возбуждения также может определять, используется ли блок 201 хранения информации формы волны возбуждения, на основании рабочего состояния, полученного от блока 202 получения рабочего состояния и по меньшей мере любого из условия крутящего момента и условия частоты вращения. Дополнительно, когда блок 201 хранения информации формы волны возбуждения не используется, блок 203 получения формы волны возбуждения может вычислять форму волны возбуждения посредством общеизвестной нормальной обработки, и может также получать форму волны возбуждения, генерируемую другим функциональным блоком (не показан), который осуществляет общеизвестную нормальную обработку.
[0089] Сущность изобретения
Как описано выше, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения устанавливает первоначальную группу IS возможных решений и новую группу US возможных решений как одну или несколько из предлагаемых групп формы волны возбуждения, на основании состояния HC наложения гармоники, то есть информации, которая задает гармонику, подлежащую наложению на основную волну, включенную в форму волны возбуждения. Устройство 100 определения формы волны возбуждения вычисляет соответствующие электромагнитные силы, формируемые в статоре 320 (сердечнике 321 статора), когда предписывает возможным решениям, включенным в одну или несколько из установленных групп возможных решений по форме волны возбуждения течь через двигатель M, путем выполнения анализа электромагнитного поля. Устройство 100 определения формы волны возбуждения определяет форму волны возбуждения на основании результата выполнения анализа электромагнитного поля. Это позволяет определять временную форму волны сигнала возбуждения, способную эффективно подавлять вибрацию двигателя M.
[0090] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения вычисляет значение индекса оценки, включающего в себя индекс оценки электромагнитной силы для оценивания значения электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора), на основании результата выполнения анализа электромагнитного поля, и определяет форму волны возбуждения на основании расчетного значения индекса оценки. Соответственно, можно определять форму волны возбуждения на основании объективного значения индекса. Это позволяет определять временную форму волны сигнала возбуждения, способного более надежно подавлять вибрацию двигателя M.
[0091] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения определяет форму волны возбуждения с использованием значения индекса оценки, который оценивает разность между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs, как значение индекса оценки электромагнитной силы для оценивания значения электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора). Это позволяет определять форму волны возбуждения на основании результата оценивания, насколько электромагнитная сила, формируемая в статоре 320 (сердечнике 321 статора) двигателя M может снижаться по сравнению с случаем возбуждения двигателя M основной волной.
[0092] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения вычисляет опорное значение электромагнитной силы Fs путем выполнения анализа электромагнитного поля. Таким образом, можно использовать точную электромагнитную силу как электромагнитную силу, формируемую в статоре 320 (сердечнике 321 статора) двигателя M при возбуждении двигателя M основной волной.
[0093] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения вычисляет электромагнитную силу, формируемую в статоре 320 (сердечнике 321 статора), и крутящий момент, формируемый в двигателе M, соответственно, когда возможное решение подается на обмотку 322 статора двигателя M, путем выполнения анализа электромагнитного поля. Соответственно, можно определять форму волны возбуждения с учетом не только электромагнитной силы, формируемой в статоре 320 (сердечнике 321 статора), но и крутящего момента, формируемого в двигателе M. Это позволяет определять временную форму волны сигнала возбуждения, способного более эффективно подавлять вибрацию двигателя M.
[0094] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения определяет форму волны возбуждения с использованием значения индекса оценки, который оценивает разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts, как значения индекса оценки крутящего момента для оценивания значения крутящего момента, формируемого в двигателе M. Это позволяет определять форму волны возбуждения, эффективное значение которой не сильно отличается от основной волны.
Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения вычисляет опорное значение крутящего момента Ts путем выполнения анализа электромагнитного поля. Таким образом, можно использовать точный крутящий момент как крутящий момент, формируемый в двигателе M при возбуждении двигателя M основной волной.
[0095] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения получает состояние HC наложения гармоники, включающее в себя порядок n гармоники (n - целое число, большее или равное 2), которая является информацией, которая задает порядок гармоники, подлежащей наложению на основную волну, включенную в форму волны возбуждения, и устанавливает возможные решения в результате наложения гармоник порядков n и меньших n на основную волну. Соответственно, можно устанавливать предлагаемые формы волны возбуждения, не ограничивая порядок гармоники конкретным порядком. Это позволяет определять временную форму волны сигнала возбуждения, способного более эффективно подавлять вибрацию двигателя M.
[0096] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения устанавливает новое возможное решение с использованием метаэвристического метода. Это позволяет определять временную форму волны сигнала возбуждения, способную эффективно подавлять вибрацию двигателя M, не осуществляя логический анализ или феноменологический анализ.
[0097] Дополнительно, в настоящем варианте осуществления, устройство 100 определения формы волны возбуждения определяет форму волны возбуждения для каждого состояния BC основной волны. Таким образом, даже в случае, когда рабочее состояние двигателя M, соответствующее состоянию BC основной волны, изменяется, можно определить временную форму волны сигнала возбуждения, способной эффективно подавлять вибрацию двигателя M в каждом рабочем состоянии.
[0098] Дополнительно, в настоящем варианте осуществления, устройство 200 приведения в действие двигателя получает информацию задания оптимальной формы волны, соответствующую рабочему состоянию OC при работе двигателя M, из фрагментов информации задания оптимальной формы волны, каждый из которых задает форму волны возбуждения, определенную для каждого из состояний BC основной волны устройством 100 определения формы волны возбуждения. Устройство 200 приведения в действие двигателя генерирует сигнал возбуждения для возбуждения двигателя M, на основании полученной информации задания оптимальной формы волны. Таким образом, можно эффективно подавлять вибрацию двигателя M, независимо от рабочего состояния OC при работе двигателя M.
[0099] Модифицированный пример
Настоящий вариант осуществления демонстрирует случай, когда разность между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs оценивается значением оценочной функции J в уравнении (5). Дополнительно, настоящий вариант осуществления представляет случай, когда разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts оценивается с использованием ограничительного уравнения (6). Однако, он не обязательно сконструирован, как описано выше. Например, разность между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs, и разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts также может быть оцениваться с использованием следующего уравнения (7).
[0100] Математическое выражение 3

[0101] В уравнении (7), каждый из w1 и w2 является весовым коэффициентом, имеющим положительное значение. Весовые коэффициенты w1, w2 являются заранее установленными коэффициентами для балансировки оценивания разности между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs, и оценивания разности между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts. Например, когда разность между расчетным значением электромагнитной силы Fc и опорным значением электромагнитной силы Fs важнее, чем разность между расчетным значением крутящего момента Tc и опорным значением крутящего момента Ts, значение весового коэффициента w1 сделано большим, чем значение весового коэффициента w2. Когда в уравнении (7) используется оценочная функция J, ограничительное уравнение (6) не нужно.
[0102] Дополнительно, представлен случай, когда, в уравнении (5) и уравнении (7), задача оптимизации является задачей минимизации, состоящая в определении минимального значения оценочной функции J. Однако, он не обязательно сконструирован, как описано выше. Например, оценочной функцией J также может быть оценочная функция, полученная умножением всей правой стороны уравнения (5) и уравнения (7) на (-1). В таком случае, задача оптимизации становится задачей максимизации, состоящей в определении максимального значения оценочной функции J.
[0103] Дополнительно, настоящий вариант осуществления представляет случай, когда устройство 100 определения формы волны возбуждения (блок 103 установления возможного решения) устанавливает несколько возможных решений как возможные решения. Однако, количество возможных решений, установленных устройством 100 определения формы волны возбуждения (блок 103 установления возможного решения) также может быть равно единице. В таком случае, когда электромагнитная сила и крутящий момент, формируемые в статоре 320 (сердечнике 321 статора) при подаче формы волны возбуждения возможного решения на двигатель M, меньше пороговых значений, устройство 100 определения формы волны возбуждения может определять возможное решение как форму волны возбуждения, например, подаваемую на двигатель M.
[0104] Заметим, что устройство определения формы волны возбуждения, устройство приведения в действие двигателя, способ определения формы волны возбуждения, способ приведения в действие двигателя и пр., объясненные в вариантах осуществления настоящего изобретения, можно реализовать, когда компьютер выполняет программу. Дополнительно, компьютерно-считываемый носитель записи, где записана программа, и компьютерный программный продукт, например, программа также может применяться как варианты осуществления настоящего изобретения. Заметим, что компьютерно-считываемый носитель записи указывает нетранзиторный носитель записи. Нетранзиторный носитель записи является, например, носителем записи, способным непрерывно записывать данные даже в отсутствие внешнего питания на носитель записи. В качестве нетранзиторного носителя записи можно использовать, например, гибкий диск, жесткий диск, оптический диск, магнито-оптический диск, CD-ROM, магнитную ленту, энергонезависимую карту памяти, ROM и т.п. Дополнительно, варианты осуществления настоящего изобретения также могут быть реализованы посредством PLC (программируемого логического контроллера) или специализированного оборудования, например ASIC (специализированной интегральной схемы).
Следует отметить, что объясненные выше варианты осуществления настоящего изобретения лишь иллюстрируют конкретные примеры осуществления настоящего изобретения, и эти варианты осуществления не следует рассматривать в порядке ограничения технического объема настоящего изобретения. Таким образом, настоящее изобретение может быть реализован в различных формах без выхода за рамки технической сущности или его основных признаков.
Промышленное применение
[0105] Настоящее изобретение можно использовать, например, для приведения в действие двигателя.
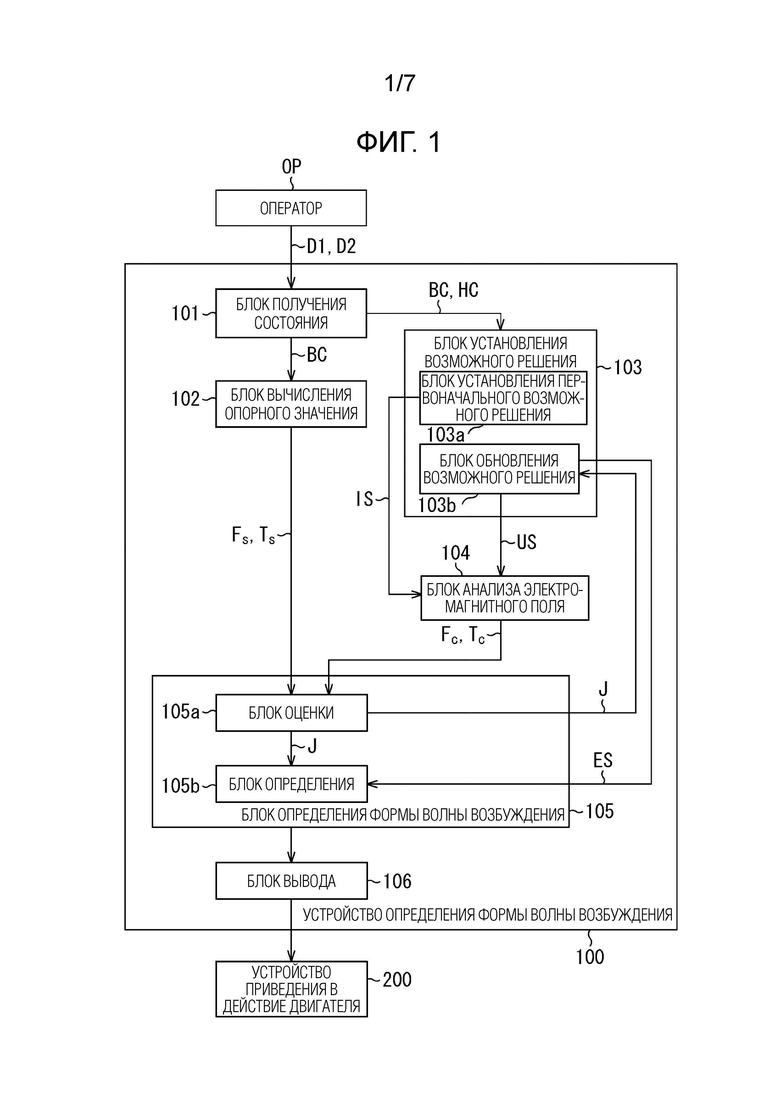
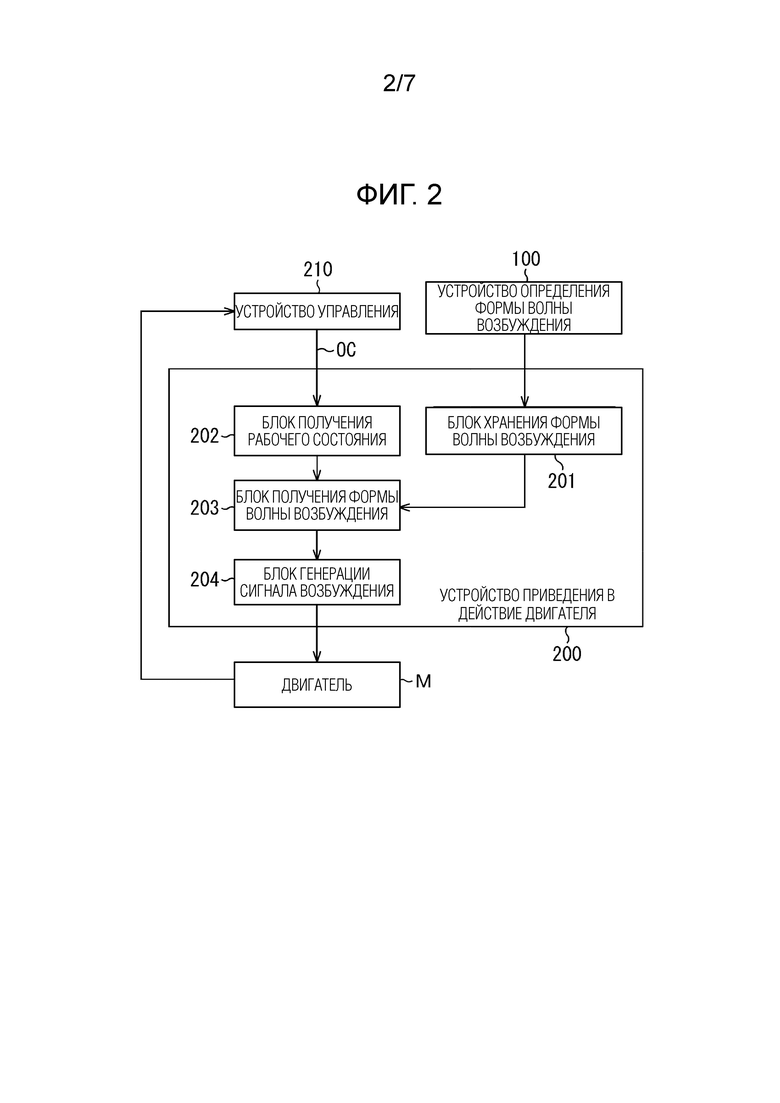
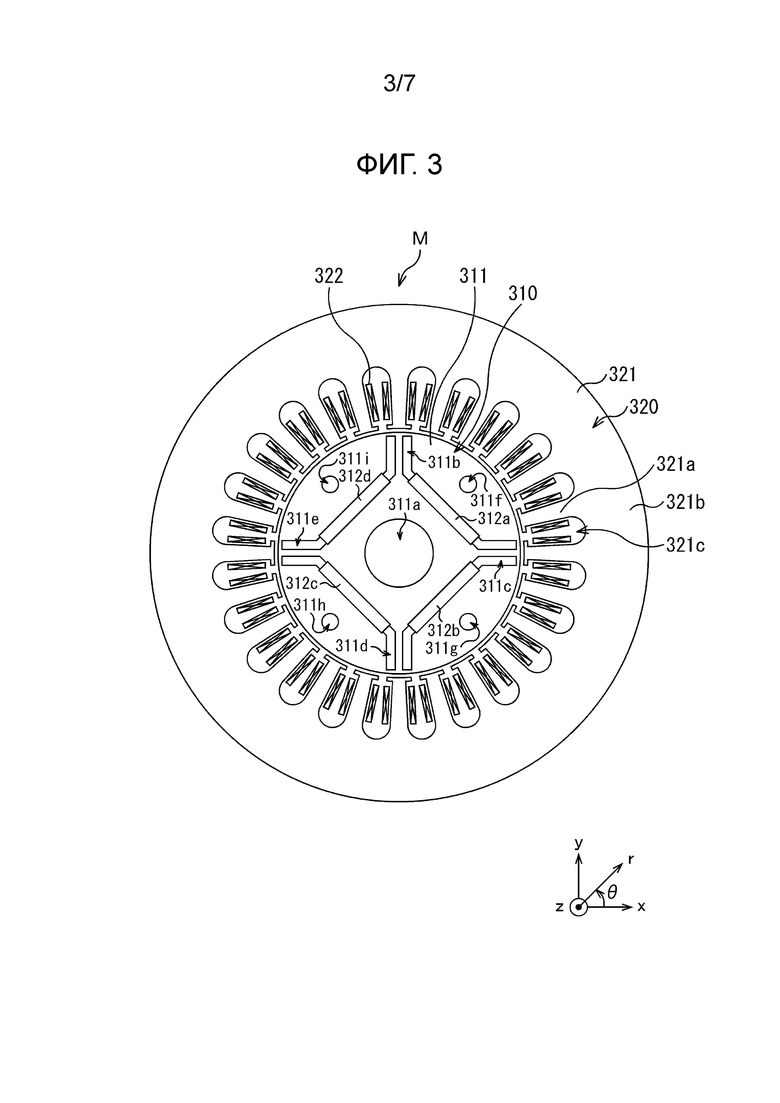
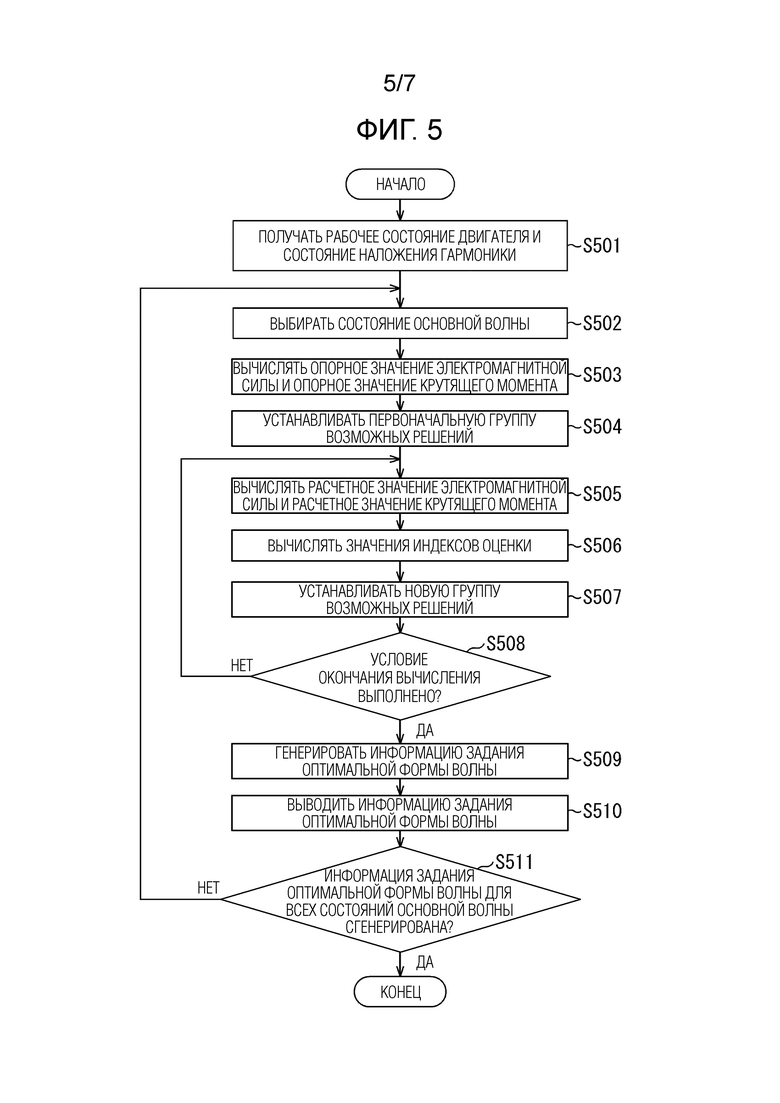
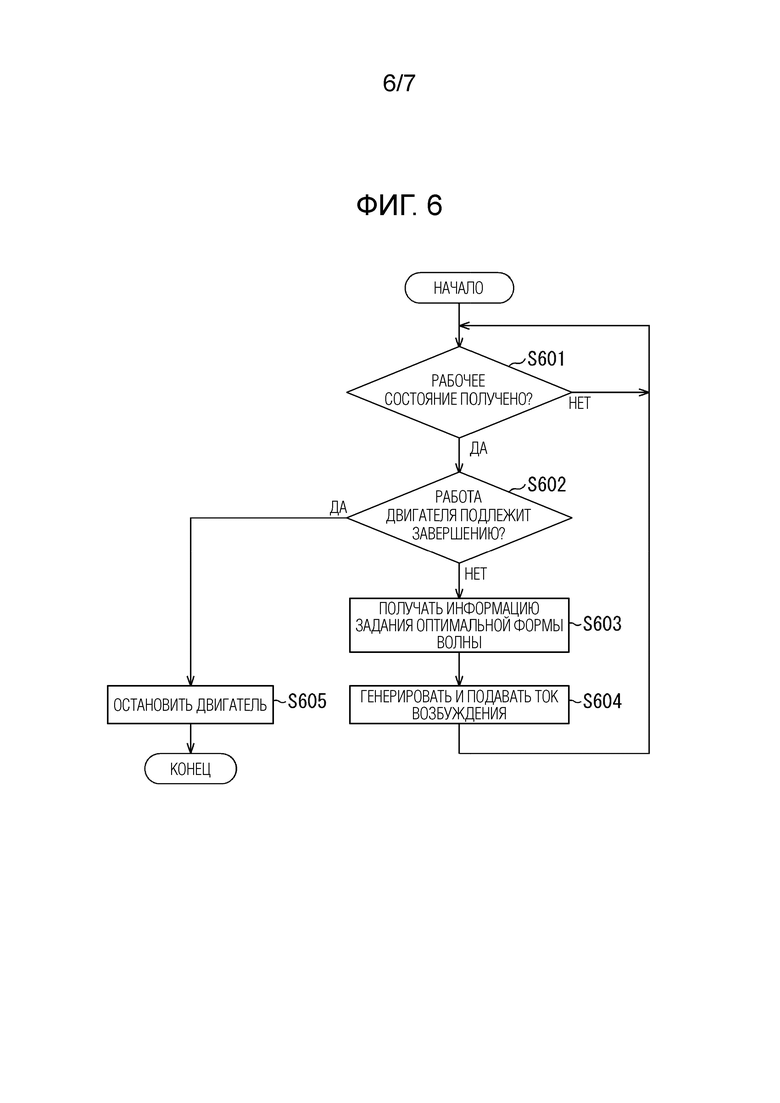
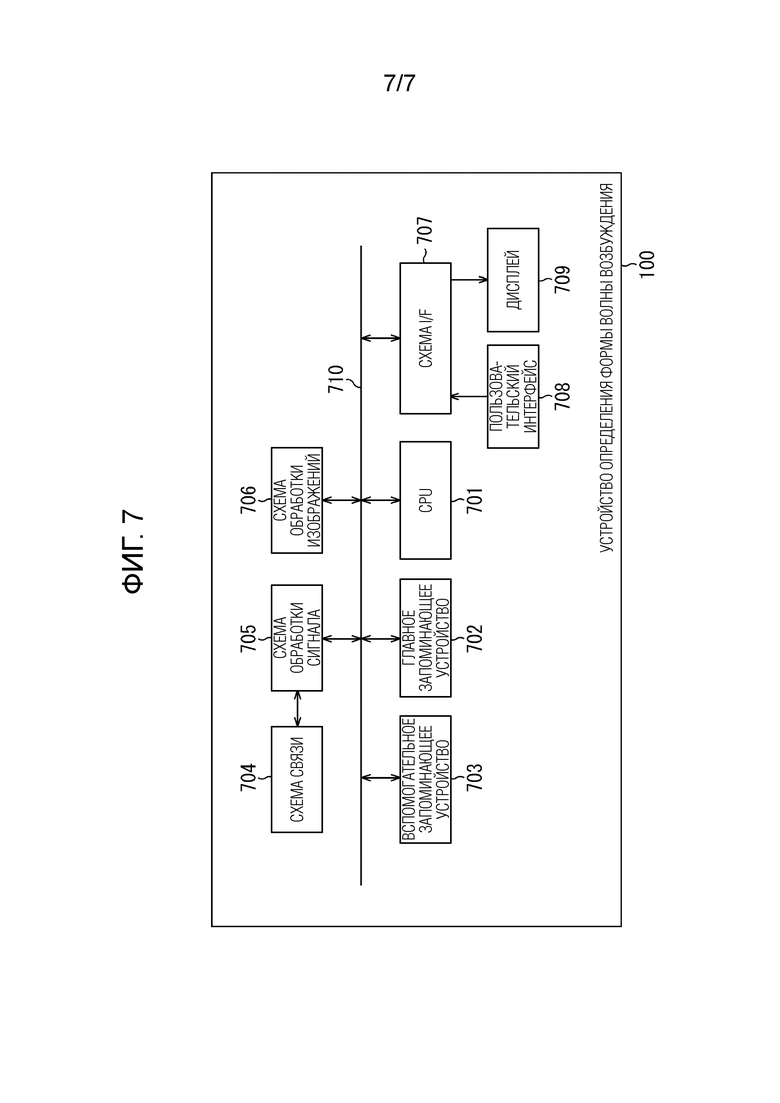
Изобретение относится к электротехнике. Технический результат заключается в определении временной формы волны сигнала возбуждения, способной эффективно подавлять вибрацию двигателя. Устройство (100) определения формы волны возбуждения для определения формы волны возбуждения, представляющей собой временную форму волны сигнала возбуждения, который подается на обмотку статора двигателя, причем устройство определения формы волны возбуждения содержит блок установления возможного решения, блок анализа электромагнитного поля, блок определения формы волны возбуждения. Блок установления возможного решения включает в себя блок установления первоначального возможного решения, который устанавливает первоначальную группу возможных решений на основании состояния основной волны, которое задает основную волну формы волны возбуждения, и состояния наложения гармоники, которое задает гармонику, подлежащую наложению на основную волну, блок обновления возможного решения, который устанавливает новую группу возможных решений из введенной в него группы возможных решений. Устройство (100) определения формы волны возбуждения устанавливает первоначальную группу (IS) возможных решений и новую группу (US) возможных решений как одну или несколько из возможных групп формы волны возбуждения на основании состояния (HC) наложения гармоники; выполняет анализ электромагнитного поля для вычисления соответствующих электромагнитных сил, формируемых в статоре (320), когда предписывает возможным решениям, включенным в одну или несколько из установленных групп возможных решений по форме волны возбуждения, течь через двигатель (M); определяет форму волны возбуждения на основании результата выполнения анализа электромагнитного поля. 5 н. и 8 з.п. ф-лы, 7 ил., 1 табл.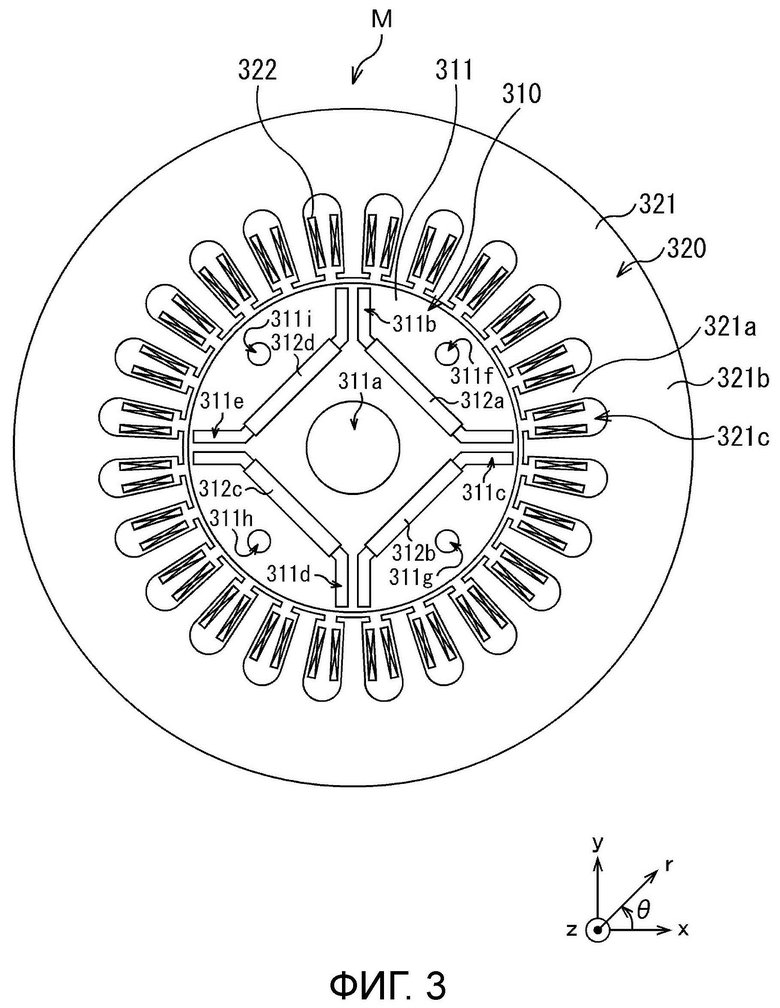
1. Устройство определения формы волны возбуждения для определения формы волны возбуждения, представляющей собой временную форму волны сигнала возбуждения, который подается на обмотку статора двигателя, причем устройство определения формы волны возбуждения содержит:
блок установления возможного решения, выполненный с возможностью установления группы возможных решений, включающей в себя одно или более возможных решений по форме волны возбуждения;
блок анализа электромагнитного поля, выполненный с возможностью вычисления электромагнитной силы, формируемой в статоре двигателя, когда одно или более возможных решений, включенных в группу возможных решений, подается на двигатель, путем выполнения анализа электромагнитного поля; и
блок определения формы волны возбуждения, выполненный с возможностью определения формы волны возбуждения на основании результата выполнения анализа электромагнитного поля блоком анализа электромагнитного поля,
причем блок установления возможного решения включает в себя:
блок установления первоначального возможного решения, который устанавливает первоначальную группу возможных решений на основании состояния основной волны, которое задает основную волну формы волны возбуждения, и состояния наложения гармоники, которое задает гармонику, подлежащую наложению на основную волну; и
блок обновления возможного решения, который устанавливает новую группу возможных решений из введенной в него группы возможных решений; и
при этом блок определения формы волны возбуждения определяет форму волны возбуждения из первоначальной группы возможных решений или новой группы возможных решений.
2. Устройство определения формы волны возбуждения по п. 1, в котором
блок определения формы волны возбуждения включает в себя:
блок оценки, который вычисляет значение индекса оценки, включающего в себя индекс оценки электромагнитной силы для оценивания значения электромагнитной силы, формируемой в статоре посредством возможного решения, на основании результата выполнения анализа электромагнитного поля; и
блок определения, который определяет форму волны возбуждения на основании значения индекса оценки, вычисленного блоком оценки.
3. Устройство определения формы волны возбуждения по п. 2, в котором
индекс оценки электромагнитной силы представляет собой индекс, который оценивает разность между расчетным значением электромагнитной силы, формируемой в статоре посредством возможного решения, вычисленным блоком анализа электромагнитного поля, и опорным значением электромагнитной силы, формируемой в статоре, когда сигнал возбуждения основной волны подается на обмотку статора двигателя.
4. Устройство определения формы волны возбуждения по п. 3, дополнительно содержащее
блок вычисления опорного значения, выполненный с возможностью вычисления опорного значения электромагнитной силы путем выполнения анализа электромагнитного поля.
5. Устройство определения формы волны возбуждения по любому из пп. 1-4, в котором
блок анализа электромагнитного поля выполняет анализ электромагнитного поля для дополнительного вычисления крутящего момента, формируемого в двигателе, когда возможное решение формы волны возбуждения, включенное в группу возможных решений, подается на обмотку статора двигателя.
6. Устройство определения формы волны возбуждения по п. 5, в котором
блок определения формы волны возбуждения включает в себя:
блок оценки, который вычисляет значение индекса оценки, включающего в себя индекс оценки крутящего момента для оценивания значения крутящего момента, формируемого в двигателе посредством возможного решения, на основании результата выполнения анализа электромагнитного поля; и
блок определения, который определяет форму волны возбуждения на основании значения индекса оценки, вычисленного блоком оценки, причем
индекс оценки крутящего момента представляет собой индекс, который оценивает разность между расчетным значением крутящего момента, формируемого в двигателе посредством возможного решения, вычисленным блоком анализа электромагнитного поля, и опорным значением крутящего момента, представляющим собой крутящий момент, соответствующий амплитуде сигнала возбуждения основной волны.
7. Устройство определения формы волны возбуждения по любому из пп. 1-6, в котором
состояние наложения гармоники включает в себя порядок гармоники, который задает порядок гармоники, и при этом
когда порядок гармоники устанавливается равным n (n - целое число, большее или равное 2), первоначальная группа возможных решений включает в себя возможные решения в результате наложения гармоник порядков n и меньших n на основную волну.
8. Устройство определения формы волны возбуждения по любому из пп. 1-7, в котором
блок обновления возможного решения устанавливает новое возможное решение с использованием метаэвристического метода.
9. Устройство определения формы волны возбуждения по любому из пп. 1-8, в котором:
блок анализа электромагнитного поля вычисляет соответствующие электромагнитные силы, формируемые в статоре, когда возможные решения, включенные в группу возможных решений, подаются на обмотку статора двигателя, путем выполнения анализа электромагнитного поля, для каждого из состояний основной волны; и
блок определения формы волны возбуждения определяет форму волны возбуждения на основании результата выполнения анализа электромагнитного поля блоком анализа электромагнитного поля, для каждого из состояний основной волны.
10. Устройство приведения в действие двигателя для приведения в действие двигателя, содержащее:
блок получения рабочего состояния, выполненный с возможностью получения рабочего состояния при работе двигателя;
блок получения формы волны возбуждения, выполненный с возможностью получения, из фрагментов информации, каждый из которых задает форму волны возбуждения, определенную для каждого из состояний основной волны устройством определения формы волны возбуждения по любому из пп. 1-9, информации, которая задает форму волны возбуждения, соответствующую рабочему состоянию при работе двигателя, полученному блоком получения рабочего состояния; и
блок генерации сигнала возбуждения, выполненный с возможностью генерации сигнала возбуждения для возбуждения двигателя, на основании информации, которая задает форму волны возбуждения, полученную блоком получения формы волны возбуждения.
11. Способ определения формы волны возбуждения для определения формы волны возбуждения, представляющей собой временную форму волны сигнала возбуждения, который подается на обмотку статора двигателя, причем способ определения формы волны возбуждения содержит:
этап установления возможного решения, на котором устанавливают группу возможных решений, включающую в себя одно или более возможных решений по форме волны возбуждения;
этап анализа электромагнитного поля, на котором вычисляют электромагнитную силу, формируемую в статоре двигателя, когда одно или более возможных решений, включенных в группу возможных решений, подается на двигатель, путем выполнения анализа электромагнитного поля; и
этап определения формы волны возбуждения, на котором определяют форму волны возбуждения на основании результата выполнения анализа электромагнитного поля на этапе анализа электромагнитного поля,
в котором этап установления возможного решения включает в себя:
этап установления первоначального возможного решения, на котором устанавливают первоначальную группу возможных решений на основании состояния основной волны, которое задает основную волну формы волны возбуждения, и состояния наложения гармоники, которое задает гармонику, подлежащую наложению на основную волну; и
этап обновления возможного решения, на котором устанавливают новую группу возможных решений из введенной в него группы возможных решений; и
при этом на этапе определения формы волны возбуждения определяют форму волны возбуждения из первоначальной группы возможных решений или новой группы возможных решений.
12. Способ приведения в действие двигателя для приведения в действие двигателя, причем способ приведения в действие двигателя содержит:
этап получения рабочего состояния, на котором получают рабочее состояние при работе двигателя;
этап получения формы волны возбуждения, на котором получают, из фрагментов информации, каждый из которых задает форму волны возбуждения, определенную для каждого из состояний основной волны способом определения формы волны возбуждения по п. 11, информацию, которая задает форму волны возбуждения, соответствующую рабочему состоянию при работе двигателя, полученному на этапе получения рабочего состояния; и
этап генерации сигнала возбуждения, на котором генерируют сигнал возбуждения для возбуждения двигателя, на основании информации, которая задает форму волны возбуждения, полученную на этапе получения формы волны возбуждения.
13. Некратковременный компьютерно-считываемый компьютерный носитель, хранящий программу, предписывающую компьютеру выполнять определение формы волны возбуждения, представляющей собой временную форму волны сигнала возбуждения, который подается на обмотку статора двигателя, причем программа предписывает компьютеру выполнять:
этап установления возможного решения, на котором устанавливают группу возможных решений, включающую в себя одно или несколько возможных решений по форме волны возбуждения;
этап анализа электромагнитного поля, на котором вычисляют электромагнитную силу, формируемую в статоре двигателя, когда возможное решение, включенное в группу возможных решений, подается на двигатель, путем выполнения анализа электромагнитного поля; и
этап определения формы волны возбуждения, на котором определяют форму волны возбуждения на основании результата выполнения анализа электромагнитного поля на этапе анализа электромагнитного поля, причем:
этап установления возможного решения включает в себя:
этап установления первоначального возможного решения, на котором устанавливают группу возможных решений из первоначальных возможных решений на основании состояния основной волны, представляющего собой информацию, которая задает основную волну формы волны возбуждения, и состояния наложения гармоники, представляющего собой информацию, которая задает гармонику, подлежащую наложению на основную волну; и
этап обновления возможного решения, на котором устанавливают новую группу возможных решений из введенной в него группы возможных решений; и
на этапе определения формы волны возбуждения определяют форму волны возбуждения из первоначальной группы возможных решений или новой группы возможных решений.
| JP 2021027766 A, 22.02.2021 | |||
| US 9041328 B2, 26.05.2015 | |||
| WO 2019202915 A1, 24.10.2019 | |||
| JP 2020048384 A, 26.03.2020 | |||
| Смесь для изготовления литейных форм и стержней | 1988 |
|
SU1588482A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С СИНХРОННЫМ ДВИГАТЕЛЕМ БЕЗ ДАТЧИКА ПОЛОЖЕНИЯ РОТОРА | 2020 |
|
RU2746795C1 |

