Изобретение относится к машиностроению, к разделу управления, и может быть использовано при создании электромеханических систем, таких как металлообрабатывающие станки, роботы, поворотные столы антенных устройств и т.п. В указанных системах появление зазоров в передаточных механизмах существенно ухудшает статическую и динамическую точность управления положением рабочего органа, следовательно, ухудшает качество выпускаемой продукции, снижает эффективность производства.
Известен способ компенсации зазоров в червячных передачах при возвратно-вращательном движении (патент на изобретение RU 2737563, «Способ компенсации зазоров в червячных передачах при возвратно-вращательном движении и беззазорная червячная передача», МПК F1H 55/24, 2020 г.), включающий сближение контактирующих поверхностей червяка и червячного колеса при повороте одной из деталей пары к другой, в котором сближение осуществляют поворотом червячного колеса вокруг своей оси под действием пружины.
Недостатками указанного способа являются низкая точность из-за возможного влияния пружины на динамические процессы в передаче и появления неконтролируемых статических и динамических ошибок в переходных процессах, например, при реверсе механизма; необходимость подбирать пружину с требуемыми свойствами и геометрическими размерами; невозможность применения для сложных, высокотехнологичных установок и установок с жесткими требованиями к массогабаритным показателям.
Известен способ управления следящим электроприводом для управления положением (источник книга С.Г. Воронин. Электропривод летательных аппаратов: Учебно-методический комплекс. Offline версия 1.0 - Челябинск, 1995-2011, http://model.exponenta.ru/epivod/cntnts.htm Глава 9. Следящие электроприводы, функциональная схема следящего электропривода, рис. 9.1). Способ заключается в том, что управление осуществляют при помощи системы автоматического регулирования, для обеспечения точности управления измеряют угловое перемещение рабочего органа, сравнивают его с заданным значением, масштабируют и интегрируют полученную разность значений, и на этой основе формируют соответственно пропорциональную и интегральную составляющие управляющего воздействия на электродвигатель через силовой преобразователь.
Основным недостатком способа является низкая точность, на всем протяжении процесса регулирования при отсутствии интегральной составляющей в контуре управления наблюдается наличие значительной статической ошибки.
Известен способ компенсации влияния механического зазора на работу следящего электропривода, (патент на изобретение RU 2811332, МПК G05B 11/01, Н02Р7/00, 2024 г.), принятый за прототип, в котором управление осуществляют при помощи системы подчиненного регулирования координат с контурами тока, скорости и углового положения, предварительно измеряют величину зазора между угловыми перемещениями вала электродвигателя и вала рабочего органа, по полученному значению зазора настраивают переходную характеристику вход-выход монитора зазора, в процессе управления измеряют угловое перемещение вала рабочего органа, сравнивают его с заданным значением, полученную разность масштабируют и интегрируют, по полученным значениям формируют пропорциональную и интегральную составляющие управляющего воздействия на электродвигатель через силовой преобразователь, измеряют угловое перемещение вала электродвигателя, угловое перемещение вала рабочего органа пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала рабочего органа к валу электродвигателя, задают верхний и нижний пределы изменений модуля углового перемещения вала электродвигателя, которые вычисляют по заявленным формулам, при достижении валом электродвигателя верхнего предела модуля углового перемещения осуществляют ступенчатое снижение его модуля до нижнего предела с одновременным ступенчатым снижением модуля углового перемещения вала рабочего органа на такую же величину, получают преобразованные угловые перемещения вала электродвигателя и вала рабочего органа, определяют разность преобразованных угловых перемещений вала электродвигателя и вала рабочего органа, сравнивают ее с величиной зазора, оценивают состояние зазора «раскрыт» или «выбран», при состоянии зазора «раскрыт» прекращают формирование интегральной составляющей управляющего воздействия и сохраняют достигнутое значение управляющего воздействия, при состоянии зазора «выбран» восстанавливают формирование интегральной составляющей управляющего воздействия, и на основе получаемой разности угловых перемещений формируют дополнительное управляющее воздействие на электродвигатель через силовой преобразователь.
Недостатком прототипа является низкая точность управления положением при появлении ошибок в определении реальной величины зазора, при отклонениях величины реального зазора от установленного в мониторе значения, обусловленных износом элементов кинематических передач в процессе эксплуатации или погрешностями их изготовления и монтажа, динамическая точность слежения существенно снижается.
Этот недостаток можно объяснить тем, что в данном случае в зависимости от состояния зазора прекращают или восстанавливают формирование интегральной составляющей управляющего воздействия на электродвигатель, т.е. осуществляют изменение той части структуры управляющего устройства, которая формирует необходимые форсировки силовых исполнительных элементов электропривода и объекта управления. Как следствие, это приводит к высокой чувствительности системы к изменениям величины реального зазора и требует высокой точности определения его состояния на основе информации, введенной в монитор зазора.
Проиллюстрируем этот недостаток использования способа-прототипа путем оценки его работоспособности на компьютерной модели. В качестве начального условия эксперимента зададим величину зазора а, равной исходной уставке монитора зазора, принятой при его настройке после измерения (случай первый).
На фиг. 1 представлены результаты моделирования для первого случая исследований в виде переходных процессов для задающего сигнала ϕзад (график а) и углового перемещения вала рабочего органа ϕ2 (график б). На этой фигуре сигнал задания ϕзад увеличивается от нуля до 5 радиан за 10 секунд, а затем на участке от десятой до двадцатой секунды снижается от 5 радиан до нуля. Данная последовательность подачи задающего сигнала соответствует моделированию процесса управления положением вала рабочего органа при изменении направления движения.
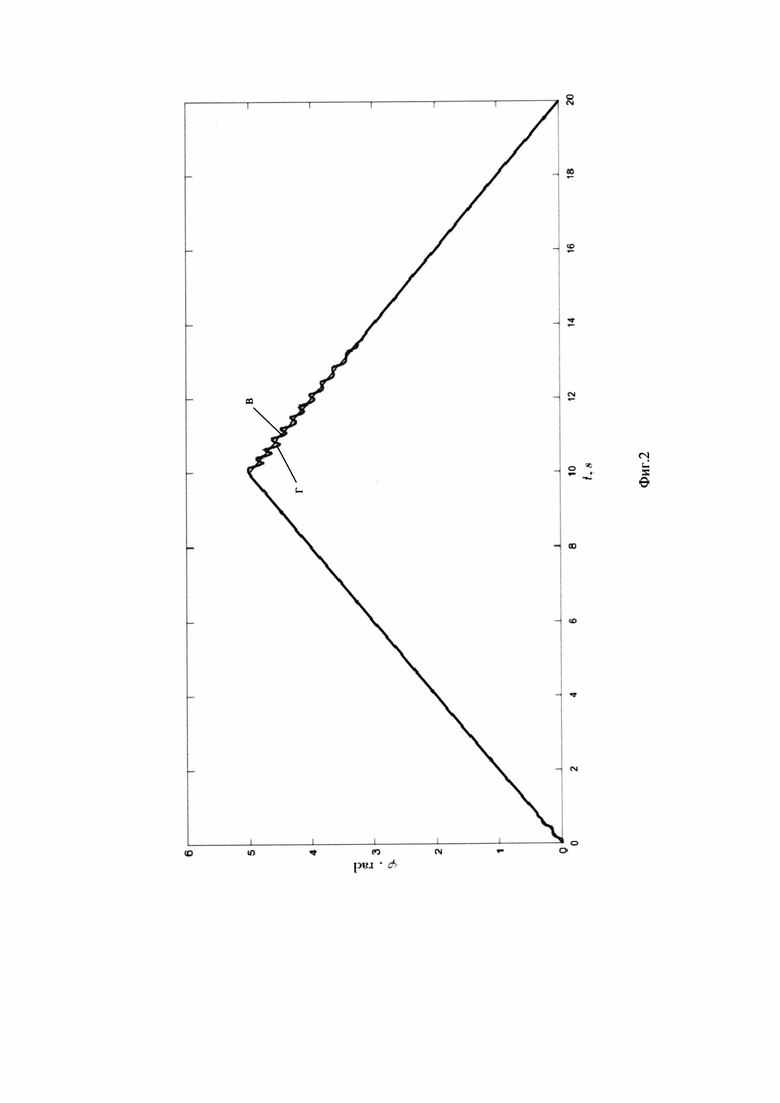
Результаты компьютерного моделирования системы для случая два, когда условия эксперимента и порядок подачи задающего сигнала аналогичны первому случаю, но величина реального зазора а на 50% выше его исходного значения, принятого при наладке монитора зазора, приведены на фиг. 2. Здесь график в соответствует переходному процессу для задающего сигнала ϕзад, график г - отработанному системой угловому перемещению вала рабочего органа ϕ2.
Сравнение результатов свидетельствует о существенном снижении динамической точности управления положением рабочего органа в процессе слежения с изменением направления движения при неконтролируемых изменениях величины реального зазора.
Технический результат предлагаемого изобретения заключается в повышении точности управления положением.
Технический результат достигается тем, что в способе управления следящим электроприводом с зазором в жесткой кинематической передаче при помощи системы подчиненного регулирования координат с контурами тока, скорости и углового положения, в котором предварительно измеряют величину зазора между угловыми перемещениями вала электродвигателя и вала рабочего органа, измеряют угловое перемещение вала рабочего органа, сравнивают его с заданным значением, измеряют угловое перемещение вала электродвигателя, угловое перемещение вала рабочего органа пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала рабочего органа к валу электродвигателя, задают верхний и нижний пределы изменений модуля углового перемещения вала электродвигателя, при достижении валом электродвигателя верхнего предела осуществляют ступенчатое снижение его модуля до нижнего предела с одновременным снижением модуля углового перемещения вала рабочего органа на такую же величину, получают преобразованные угловые перемещения, определяют их разность, сравнивают ее с величиной зазора, оценивают состояние зазора «раскрыт» или «выбран» и в зависимости от состояния зазора осуществляют изменения структуры управляющего устройства, на основе получаемой разности угловых перемещений формируют дополнительное управляющее воздействие на электродвигатель через силовой преобразователь, угловое перемещение вала электродвигателя пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала электродвигателя к валу рабочего органа, в состоянии зазора «выбран» заданное значение углового перемещения сравнивают с измеренным угловым перемещением вала рабочего органа, а в состоянии зазора «раскрыт» сравнение заданного перемещения осуществляют с измеренным угловым перемещением вала электродвигателя, приведенным к валу рабочего органа, причем в начальный момент раскрытия зазора устанавливают начальное значение  приведенного углового перемещения вала электродвигателя, принимая его равным угловому перемещению вала рабочего органа в начальный момент раскрытия зазора ϕ2(0), а отсчет приведенного углового перемещения вала электродвигателя при движении в пределах измеренного зазора осуществляют от установленного начального значения
приведенного углового перемещения вала электродвигателя, принимая его равным угловому перемещению вала рабочего органа в начальный момент раскрытия зазора ϕ2(0), а отсчет приведенного углового перемещения вала электродвигателя при движении в пределах измеренного зазора осуществляют от установленного начального значения 
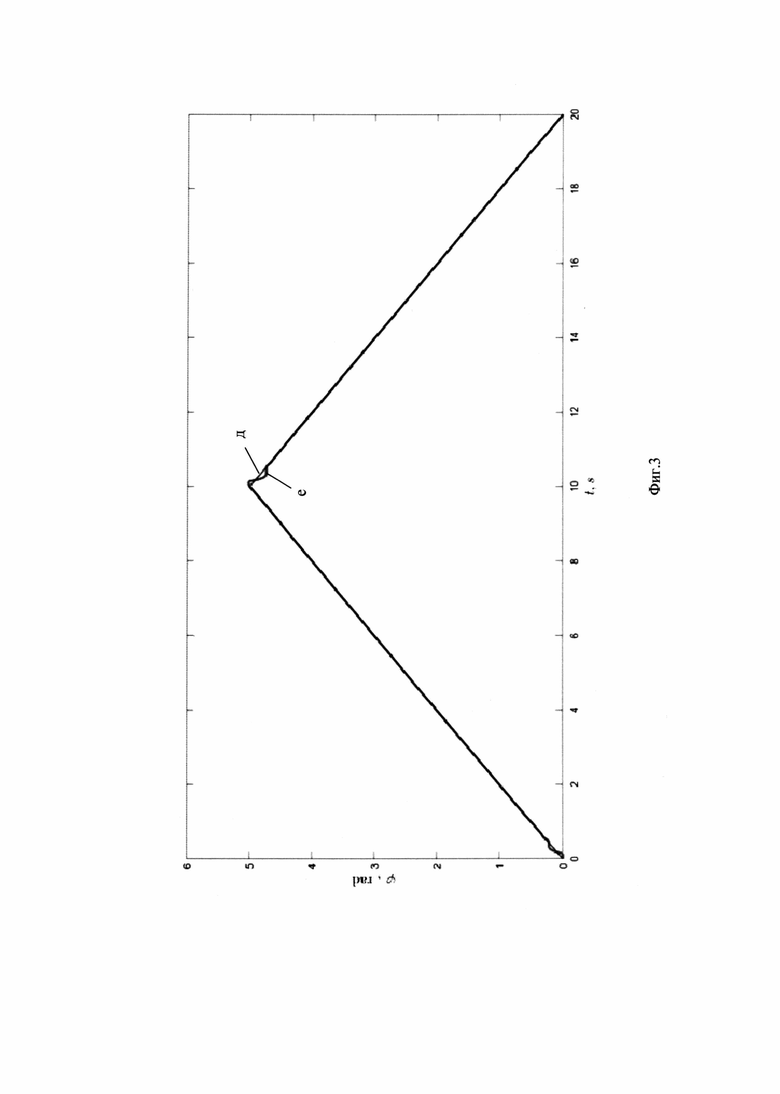
Сущность изобретения поясняют графические материалы. На фиг. 3 приведены результаты компьютерного моделирования работы системы управления следящим электроприводом с применением предлагаемого способа в виде переходных процессов изменения задающего сигнала ϕзад от нуля до 5 радиан за 10 секунд, снижение этой величина до нуля за следующие 10 секунд (график д) и отработанного системой сигнала углового перемещения вала рабочего органа ϕ2 (график е). Переходные процессы сняты при использовании заявляемого способа для управления электроприводом, параметры которого установлены такими же, как и при испытании способа-прототипа, но установлена величина реального зазора а, превышающая на 50% исходное значение, зафиксированное монитором зазора (случай три). Кроме этого для случая три введена погрешность приведения углового положения вала электродвигателя к валу рабочего органа величиной 5%.
Способ осуществляют следующим образом.
Предварительно для выбранной электромеханической системы экспериментальным путем измеряют величину зазора а между угловыми перемещениями вала электродвигателя и выходного вала рабочего органа. По полученному значению зазора настраивают переходную характеристику вход-выход монитора зазора. Управление следящим электроприводом с зазором в жесткой кинематической передаче осуществляют при помощи системы подчиненного регулирования координат с контурами тока, скорости и углового положения. Для организации этой системы в процессе управления измеряют угловое перемещение вала рабочего органа, сравнивают его с заданным значением, масштабируют и интегрируют полученную разность значений, формируют на этой основе соответственно пропорциональную и интегральную составляющие управляющего воздействия на электродвигатель через силовой преобразователь.
На этом же этапе измеряют угловое перемещение вала электродвигателя для того, чтобы можно было впоследствии с учетом передаточного отношения механической части привести угловое перемещение вала электродвигателя к угловому перемещению вала рабочего органа и угловое перемещение вала рабочего органа к угловому перемещению вала электродвигателя.
Задают верхний ϕ1max и нижний ϕ1min пределы изменений модуля углового перемещения вала электродвигателя. При достижении валом электродвигателя верхнего предела ϕ1max осуществляют ступенчатое снижение его модуля до нижнего предела ϕ1min с одновременным снижением модуля углового перемещения вала рабочего органа на такую же величину.
Для ограничения роста модуля приведенного значение углового перемещения вала рабочего органа  и модуля углового перемещения вала электродвигателя |ϕ1| устанавливают верхний предел их изменений ϕmax, исходя из имеющейся величины погрешности приведения угла поворота вала рабочего органа ϕ2 к валу электродвигателя, величины измеренного ранее экспериментально величины зазора α и допустимой погрешности определения разности углов. Ограничение |ϕ1| не выше ϕ1max производят путем ступенчатого снижения модуля |ϕ1| до нижнего предела ϕ1min в том случае, если достигнет величины ϕ1max. Одновременно на такую же величину снижают модуль
и модуля углового перемещения вала электродвигателя |ϕ1| устанавливают верхний предел их изменений ϕmax, исходя из имеющейся величины погрешности приведения угла поворота вала рабочего органа ϕ2 к валу электродвигателя, величины измеренного ранее экспериментально величины зазора α и допустимой погрешности определения разности углов. Ограничение |ϕ1| не выше ϕ1max производят путем ступенчатого снижения модуля |ϕ1| до нижнего предела ϕ1min в том случае, если достигнет величины ϕ1max. Одновременно на такую же величину снижают модуль  Такое синхронное снижение модулей угловых перемещений |ϕ1| и
Такое синхронное снижение модулей угловых перемещений |ϕ1| и  сохраняет точность измерения разности углов и, как следствие, точность слежения.
сохраняет точность измерения разности углов и, как следствие, точность слежения.
Величину нижнего предела ϕ1min, определяющего зону переключения, устанавливают, исходя из вычислительных возможностей (быстродействия) цифрового устройства управления, обеспечивающего техническую реализацию разработанного способа, и максимальной скорости слежения.
Для повышения точности управления угловым перемещением вала рабочего органа при возможных вариациях размеров реального зазора угловое перемещение рабочего органа пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала рабочего органа к валу электродвигателя, определяют разность угловых перемещений вала электродвигателя и приведенного углового перемещения вала рабочего органа, сравнивают ее с исходной величиной зазора, оценивают его состояние («раскрыт» или «выбран»).
Изменение структуры управляющего устройства в зависимости от состояния зазора «раскрыт» или «выбран» производят следующим образом. В состоянии зазора «выбран» заданное значение углового перемещения предлагается сравнивать с измеренным угловым перемещением вала рабочего органа, а в состоянии зазора «раскрыт» сравнение заданного перемещения осуществлять с измеренным угловым перемещением вала электродвигателя, приведенным к валу рабочего органа. Для этого необходимо угловое перемещение вала электродвигателя пересчитать с учетом передаточного отношения механической части и привести угловое перемещение вала электродвигателя к валу рабочего органа.
В данном случае осуществляется «более спокойное» (не форсирующее силовые элементы системы) изменение структуры управляющего устройства в зависимости от состояния зазора путем переключения обратных связей по угловым перемещениям рабочего органа и электродвигателя, которые оказываются близкими по своим значениям в статике и в динамике при жесткой кинематической передаче. Тем самым достигается гораздо меньшая чувствительность системы к возможным изменениям величины реального зазора в ходе эксплуатации.
Указанный положительный эффект может быть достигнут только при точном приведении углового перемещения вала электродвигателя к валу рабочего органа. В условиях длительного слежения с изменениями направления движения возможные погрешности приведения неизбежно приведут к накоплению большой ошибки определения углового положения вала электродвигателя к моменту раскрытия зазора и переключения обратной связи. Это вызовет мощное динамическое воздействие на систему в момент раскрытия зазора и приведет к снижению точности слежения.
Для исключения этого неблагоприятного эффекта в способе предусматривается установление начальной величины приведенного углового перемещения вала электродвигателя в момент раскрытия зазора  равной величине углового перемещения рабочего органа ϕ2(0), измеренного в этот момент времени, и последующий отсчет приведенного положения вала электродвигателя при движении в пределах зазора, начиная от этого установленного значения
равной величине углового перемещения рабочего органа ϕ2(0), измеренного в этот момент времени, и последующий отсчет приведенного положения вала электродвигателя при движении в пределах зазора, начиная от этого установленного значения  Это позволяет устранить ошибку приведения координаты двигателя к валу рабочего органа, накопленную к моменту раскрытия зазора, и сохранить высокую точность слежения.
Это позволяет устранить ошибку приведения координаты двигателя к валу рабочего органа, накопленную к моменту раскрытия зазора, и сохранить высокую точность слежения.
Преимущества заявленного способа проиллюстрированы на фиг. 3 при его использовании для управления электроприводом с теми же параметрами, что и при исследовании прототипа. Моделирование проведено при повышении величины реального зазора на 50% от его исходного значения. Дополнительно введена погрешность приведения углового положения вала электродвигателя к валу рабочего органа величиной 5%.
Сравнение результатов использования способа-прототипа (фиг. 2) с результатами применения заявленного способа (фиг. 3) свидетельствует о повышении точности управления положением при возможных изменениях величины механического зазора в процессе эксплуатации оборудования и компенсации погрешности приведения параметра электродвигателя к валу рабочего органа в длительном режиме слежения с изменением направления движения.
Таким образом, применение действий, предусмотренных для реализации заявленного способа управления следящим электроприводом с зазором в жесткой кинематической передаче, позволяет обеспечить повышение точности управления положением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2023 |
|
RU2811332C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Способ идентификации присоединенного момента инерции тела и устройство для его осуществления | 2016 |
|
RU2627023C1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2013 |
|
RU2544004C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
Изобретение относится к машиностроению, к разделу управления, и может быть использовано при создании электромеханических систем, таких как металлообрабатывающие станки, роботы, поворотные столы антенных устройств и т.п. В способе управления следящим электроприводом с зазором в жесткой кинематической передаче при помощи системы подчиненного регулирования координат с контурами тока, скорости и углового положения, в котором предварительно измеряют величину зазора между угловыми перемещениями вала электродвигателя и вала рабочего органа, измеряют угловое перемещение вала рабочего органа, сравнивают его с заданным значением, измеряют угловое перемещение вала электродвигателя, угловое перемещение вала рабочего органа пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала рабочего органа к валу электродвигателя, задают верхний и нижний пределы изменений модуля углового перемещения вала электродвигателя, при достижении валом электродвигателя верхнего предела осуществляют ступенчатое снижение его модуля до нижнего предела с одновременным снижением модуля углового перемещения вала рабочего органа на такую же величину, получают преобразованные угловые перемещения, определяют их разность, сравнивают ее с величиной зазора, оценивают состояние зазора «раскрыт» или «выбран» и в зависимости от состояния зазора осуществляют изменения структуры управляющего устройства, на основе получаемой разности угловых перемещений формируют дополнительное управляющее воздействие на электродвигатель через силовой преобразователь, угловое перемещение вала электродвигателя пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала электродвигателя к валу рабочего органа, в состоянии зазора «выбран» заданное значение углового перемещения сравнивают с измеренным угловым перемещением вала рабочего органа, а в состоянии зазора «раскрыт» сравнение заданного перемещения осуществляют с измеренным угловым перемещением вала электродвигателя, приведенным к валу рабочего органа, причем в начальный момент раскрытия зазора устанавливают начальное значение  приведенного углового перемещения вала электродвигателя, принимая его равным угловому перемещению вала рабочего органа в начальный момент раскрытия зазора ϕ2(0), а отсчет приведенного углового перемещения вала электродвигателя при движении в пределах измеренного зазора осуществляют от установленного начального значения
приведенного углового перемещения вала электродвигателя, принимая его равным угловому перемещению вала рабочего органа в начальный момент раскрытия зазора ϕ2(0), а отсчет приведенного углового перемещения вала электродвигателя при движении в пределах измеренного зазора осуществляют от установленного начального значения  Технический результат - повышение точности управления положением. 3 ил.
Технический результат - повышение точности управления положением. 3 ил.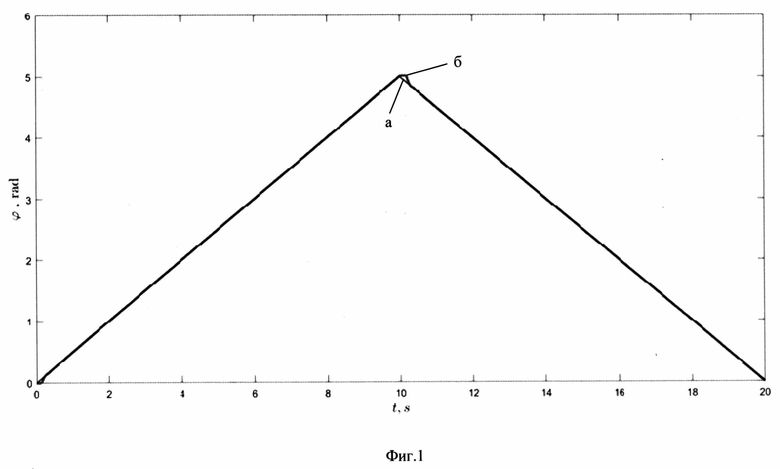
Способ управления следящим электроприводом с зазором в жесткой кинематической передаче при помощи системы подчиненного регулирования координат с контурами тока, скорости и углового положения, в котором предварительно измеряют величину зазора между угловыми перемещениями вала электродвигателя и вала рабочего органа, измеряют угловое перемещение вала рабочего органа, сравнивают его с заданным значением, измеряют угловое перемещение вала электродвигателя, угловое перемещение вала рабочего органа пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала рабочего органа к валу электродвигателя, задают верхний и нижний пределы изменений модуля углового перемещения вала электродвигателя, при достижении валом электродвигателя верхнего предела осуществляют ступенчатое снижение его модуля до нижнего предела с одновременным снижением модуля углового перемещения вала рабочего органа на такую же величину, получают преобразованные угловые перемещения, определяют их разность, сравнивают ее с величиной зазора, оценивают состояние зазора «раскрыт» или «выбран» и в зависимости от состояния зазора осуществляют изменения структуры управляющего устройства, на основе получаемой разности угловых перемещений формируют дополнительное управляющее воздействие на электродвигатель через силовой преобразователь, отличающийся тем, что угловое перемещение вала электродвигателя пересчитывают с учетом передаточного отношения механической части, приводят угловое перемещение вала электродвигателя к валу рабочего органа, в состоянии зазора «выбран» заданное значение углового перемещения сравнивают с измеренным угловым перемещением вала рабочего органа, а в состоянии зазора «раскрыт» сравнение заданного перемещения осуществляют с измеренным угловым перемещением вала электродвигателя, приведенным к валу рабочего органа, причем в начальный момент раскрытия зазора устанавливают начальное значение  приведенного углового перемещения вала электродвигателя, принимая его равным угловому перемещению вала рабочего органа в начальный момент раскрытия зазора ϕ2(0), а отсчет приведенного углового перемещения вала электродвигателя при движении в пределах измеренного зазора осуществляют от установленного начального значения
приведенного углового перемещения вала электродвигателя, принимая его равным угловому перемещению вала рабочего органа в начальный момент раскрытия зазора ϕ2(0), а отсчет приведенного углового перемещения вала электродвигателя при движении в пределах измеренного зазора осуществляют от установленного начального значения 
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2023 |
|
RU2811332C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Способы компенсации влияния механических зазоров на работу позиционноследящих систем электропривода / С.В | |||
| Тарарыкин, В.В | |||
| Аполонский // Электротехника | |||
| Электромагнитный прерыватель | 1924 |
|
SU2023A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - С | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

