Изобретение относится к области электротехники, а именно к способам позиционирования асинхронных электроприводов общепромышленных механизмов, в том числе электроприводов подъемных машин, металлообрабатывающих станков с числовым программным управлением и других механизмов, где требуется точное позиционирование рабочего органа.
Известны способы позиционирования асинхронных электроприводов, рассмотренные, например, в работах (Зусман В.Г. и др. Автоматизация позиционных электроприводов. М.: ″Энергия″, 1970, 119 с.; Теория электропривода: Учеб. для вузов. 2-е изд. переаб. и доп. / Ключев В.И. Энергоатомиздат, 2001. - 704 с.), а так же (Системы автоматизированного управления электроприводами: Учеб. пособие / Гульков Г.И., Петренко Ю.Н., Раткевич Е.П., Симоненкова О.Л. Новое знание, 2004, С 249-262).
Из этих обзоров следует что, наиболее распространенным вариантом позиционирования электропривода является управление положением в пространстве его исполнительного органа.
Наиболее близким по технической сущности к заявляемому является способ позиционирования (Патент РФ №2401501, H02P 7/06, G05B 11/36. Позиционный программно-управляемый электропривод / Добробаба Ю.П., Прохоренко Д.С. / опубл. 22.06.2009). Указанный способ включает установку значения задающего напряжения системы автоматического регулирования положения исполнительного органа механизма, определение задающего напряжения корректора контура положения исполнительного органа механизма, определение задающего напряжения корректора контура частоты вращения электропривода, измерение и вычисление значений напряжения, тока, частоты вращения, положения исполнительного органа механизма, формирование зависимости напряжения, приложенного к якорной цепи электродвигателя, от времени.
Недостатками указанного способа является необходимость реализации в системе управления пропорционально-интегрального регулятора, что приводит к значительному начальному перерегулированию и увеличению времени регулирования.
Целью изобретения является повышение точности и быстродействия позиционирования исполнительного органа промышленной установки при работе с переменной нагрузкой и переменным моментом инерции электропривода при одновременном упрощении структуры системы управления.
Техническим результатом изобретения является повышение быстродействия и точности позиционирования рабочего органа, повышение надежности электропривода.
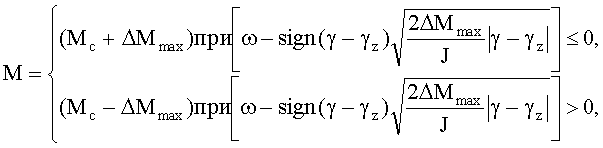
Указанный технический результат достигается тем, что в предлагаемом способе позиционирования асинхронного электропривода, включающем установку заданного значения положения рабочего органа, установку максимального значения динамического момента электропривода, измерение и вычисление текущего положения рабочего органа, частоты вращения рабочего органа, суммарных приведенных значений момента инерции и момента сопротивления электропривода, согласно изобретению электромагнитный момент формируют по следующим правилам
где М, Mc - электромагнитный момент и момент сопротивления электродвигателя;
ω - угловая частота вращения рабочего органа;
γ, γz - текущее и заданное значения положения рабочего органа;
ΔMmax - максимальное значение динамического момента электропривода;
J - приведенный момент инерции электропривода;
|γ-γz| - абсолютное значение разности текущего и заданного значений положения рабочего органа.
Заявляемое изобретение поясняется чертежами, где на фиг.1, фиг.2, фиг.3 и фиг.4 показаны временные зависимости электромагнитного момента, момента сопротивления, угловой частоты вращения, текущего и заданного значений положения рабочего органа при реализации позиционирования в соответствии с заявляемым способом. На фиг.5 показана структурная схема одного из возможных вариантов реализации заявляемого способа.
В заявляемом способе формирование электромагнитного момента на уровне, необходимом для создания максимального динамического момента электропривода, позволяет повысить быстродействие контура регулирования положения рабочего органа.
На фиг.1 и фиг.2 показан характер изменения электромагнитного момента и момента сопротивлений асинхронного электродвигателя при обеспечении постоянства динамического момента при повороте ротора асинхронного электродвигателя на угол 4π, фазовые траектории и линии переключения.
О точности и быстродействии данного способа позиционирования асинхронного электродвигателя свидетельствуют графики, приведенные на фиг.2 и фиг.3, где ротор асинхронного электродвигателя начинает совершать два оборота вперед. При достижении заданного положения угловая скорость ротора равна нулю. В момент времени 1,5 секунды ротор асинхронного электродвигателя совершает 1 оборот назад. На этих графиках видно, что система регулирования в точности отрабатывает задание.
Заявляемый способ позиционирования асинхронного электропривода реализуют следующим образом фиг.4:
с помощью тахогенератора 1 определяют текущую угловую частоту вращения ротора, которая поступает на вход блока интегратора 2, на выходе получаем величину угла поворота ротора электродвигателя, блок сумматора 3 сравнивает текущее и заданное значении угла поворота вала ротора электродвигателя, если сигнал на входе релейного блока 4 больше нуля, то на выходе устанавливается единица, в противном случае на выходе устанавливается минус единица.
Необходимое значение электромагнитного момента формируют с помощью множителей 5, 6, делителя 7 и блока вычисления модуля 8, датчиков напряжения и тока 9, 10, 11, блока формирования управляющего воздействия (динамического момента) 12. Если значение выходного сигнала с релейного блока 13, поступающее на входы переключателей АИН 14, 15, 16, больше единицы, то управляющее воздействие будет формироваться по правилу М=Мс-ΔMmax, в противном случае М=Мс+ΔMmax.
Чтобы получить представление о процессе позиционирования асинхронного электропривода, рассмотрим его как задачу перевода электрической машины из одного состояние в другое. Движение электропривода можно представить, модифицируя запись основного уравнения движения электропривода:
Где γ - угол поворота вала ротора электродвигателя;
ω - угловая частота вращения ротора;
ΔМ - динамический момент (управляющее воздействие);
J - приведенный момент инерции.
Запишем для исходной системы в соответствии с принципом максимума Л.С. Понтрягина вспомогательную функцию Гамильтона Н:
H=Ψ1ω+Ψ2J-1ΔM(t).
В силу условий обеспечения максимума для Н будем иметь:
ΔM(t)=ΔMmax, при ψ2(t)>0;
ΔM(t)=ΔMmin, при ψ2(t)≤0.
Откуда следует, что оптимальное управление является функцией, принимающей значения ΔMmax, ΔMmin и имеющей не более двух интервалов постоянства.
По отношению к электромагнитному моменту (М) его необходимое (задаваемое) значение определится как Mz=ΔМ+MC и при постоянстве динамического момента будет определяться только величиной момента сопротивления.
Таким образом, возникает задача перевода электропривода из одного состояния в другое за минимум времени при изменяющейся нагрузке, что эквивалентно обеспечению классических фазовых траекторий перемещения по (Понтрягин Л.С., В.Г. Болтянский, Р.В. Гамкрелидзе, Е.Ф. Мищенко / Математическая теория оптимальных процессов. М.: Наука, 1983. - 392 с.).
Из исходной системы уравнения движения можно записать 
При этом правила формирования необходимых значений электромагнитного момента асинхронного электродвигателя таковы:
где М, MC - электромагнитный момент и суммарный приведенный момент сопротивления.
Условие ΔM=const возможно обеспечить при реализации управления величиной электромагнитного момента в соответствии с (Патент РФ №2395157, МПК С2 Н02Р 27/00, Н02Р 27/05, Н20Р 25/02, Н20Р 23/00, Способ управления величиной электромагнитного момента электрической машины переменного тока / Ещин Е.К., Григорьев А.В., Соколов И.А., опубл. 20.07.2010. Бюл. №20) для обеспечения М=Mс+ΔM.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| СПОСОБ ОПТИМАЛЬНОГО ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2468496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| СПОСОБ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2572097C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
Изобретение относится к области электротехники и может быть использовано для позиционирования асинхронных электроприводов общепромышленных механизмов, в том числе электроприводов подъемных машин, металлообрабатывающих станков с числовым программным управлением и других механизмов, где требуется точное позиционирование рабочего органа. Техническим результатом является повышение быстродействия, точности позиционирования рабочего органа и надежности электропривода. Способ включает установку заданного значения положения рабочего органа и максимального значения динамического момента электропривода, измерение текущего положения рабочего органа и частоты вращения рабочего органа, вычисление момента инерции, момента сопротивления электропривода, формирование электромагнитного момента. 4 ил. 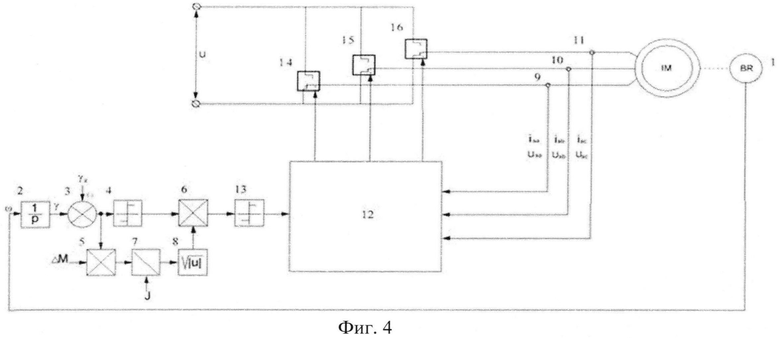
Способ позиционирования асинхронного электропривода, включающий установку заданного значения положения рабочего органа, установку максимального значения динамического момента электропривода, измерение и вычисление текущего положения рабочего органа, частоты вращения рабочего органа, суммарных приведенных значений момента инерции и момента сопротивления электропривода, отличающийся тем, что электромагнитный момент формируют по следующим правилам
где М, Mc - электромагнитный момент и момент сопротивления электродвигателя;
ω - угловая частота вращения рабочего органа;
γ, γz - текущее и заданное значения положения рабочего органа;
ΔMmax - максимальное значение динамического момента электропривода;
J - приведенный момент инерции электропривода;
|γ-γz| - абсолютное значение разности текущего и заданного значений положения рабочего органа.
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С ИДЕАЛЬНЫМ ВАЛОПРОВОДОМ | 2010 |
|
RU2412525C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ УПРУГОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2464696C1 |
| ПОЗИЦИОННЫЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2401501C1 |
| Электропривод | 1987 |
|
SU1525677A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КАТОДА ДЛЯ CO -ЛАЗЕРА | 1992 |
|
RU2042223C1 |
| DE 60200287 T2, 10.03.2005 | |||
| US 20070229019 A1, 04.10.2007 | |||
| Устройство для защиты электрических машин | 1982 |
|
SU1037372A2 |
| JP 2012010557 A, 12.01.2012 | |||

