УРОВЕНЬ ТЕХНИКИ
Многие бытовые приборы используют двигатель, насос, измельчитель или другой исполнительный механизм для обеспечения основной функциональности этого прибора или ее части. Для предотвращения чрезмерной вибрации на корпусе устройства и/или чрезмерного механического вибрационного шума используют системы подвеса, снижающие механические вибрации от исполнительного блока к корпусу устройства. Системы подвеса также часто используют для снижения шума, связанного с вибрацией, и/или для управления звуковыми характеристиками (например, для изменения восприятия шума).
Примеры стандартных систем подвеса включают в себя компоненты подвески автомобиля (винтовые пружины, пластинчатые пружины, стержневые пружины кручения и т. д.), крепежные системы для блоков кондиционирования воздуха на зданиях, крепления холодильных и морозильных насосов, крепления барабанов стиральных машин, системы крепления для устройств, чувствительных к вибрации или ударам, таких как стереосистемы, проигрыватели компакт-дисков, как, например, раскрыты в US2002/0053632, и крепления для двигателей в кухонных приборах. В них используются различные комбинации пружин и резиновых креплений.
В большинстве случаев будет достаточно разместить вибрирующий компонент на компоненте резинового подвеса или использовать простую винтовую пружину. Однако для некоторых применений этот подход не обеспечивает достаточное механическое разъединение и/или достаточное обеспечение устойчивости или выравнивание этого компонента. Примеры включают в себя кофемолку полностью автоматической кофемашины, насос кофемашины и насос парового утюга, в которых используют комбинацию пружин и резиновых частей и креплений подвеса двигателя.
До пояснения системы в соответствии с настоящим изобретением сначала будут описаны некоторые основные крепежные системы для демпфирования вибрации.
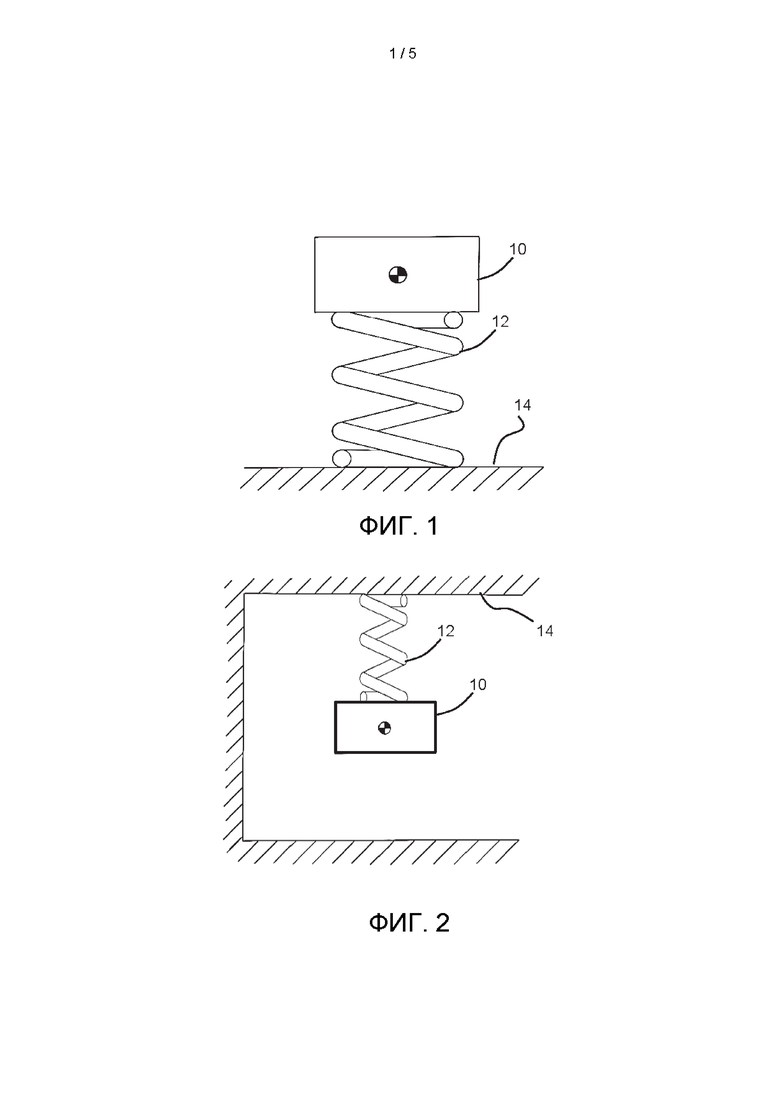
На фиг. 1 показан объект 10, закрепленный на верхней части пружины 12, которая закреплена на нижележащей опоре 14, а на фиг. 2 показан объект 10, подвешенный на пружине 12, которая свисает с опоры 14, расположенной выше.
Фиг. 1 и 2 представляют собой изображения в двумерной плоскости. Для поддержания функции подвеса центр массы объекта расположен на одной точно линии с точками крепления двух концов пружины. В противном случае, на фиг. 1 объект будет опрокидываться вбок и вращаться вокруг верхней точки крепления пружины, а на фиг. 2 объект будет вращаться вокруг нижней точки крепления пружины до тех пор, пока центр масс снова не окажется на одной линии с точками крепления пружины. Такие вращательные движения изменяют ориентацию объекта, создавая возможные проблемы несоосности.
В примере по фиг. 1 опрокидывание может быть предотвращено посредством компоновки по фиг. 3, в которую добавлены вторая вертикальная пружина 20 и третья горизонтальная пружина 22. Вторая пружина 20 ограничивает вращение объекта, а третья пружина 22 ограничивает боковое перемещение объекта.
В примере, показанном на фиг. 2, вращение вокруг точки крепления пружины и объекта может быть ограничено посредством компоновки, показанной на фиг. 4, в которое добавлена вторая вертикальная маятниковая пружина 30. При попытках вращения объекта вокруг своего центра масс он будет ограничен, поскольку на горизонтальном расстоянии от центра масс объекта размещены две пружины 12, 30.
Свободно свисающая компоновка, показанная на фиг. 2 и 4, функционирует как маятниковая система. Если толкнуть объект в бок, а затем отпустить, он автоматически вернется в нейтральное нижнее положение, что обеспечивает устойчивую и самовыравнивающуюся компоновку.
Следовательно, очевидно, что выравнивание является более сложным процессом и требует большего количества пружин для объекта, размещенного на верхней части компоновки с пружинами, по сравнению с объектом, свисающим с компоновки с пружинами. Как правило, чем больше пружин, тем выше остаточные силы вибрации по отношению к корпусу устройства. Поэтому предпочтительна конструкция подвеса, в которой объект свисает, поскольку она требует меньшего количества пружин.
Одна из основных проблем, возникающих с системами подвеса, заключается в поддержании характеристик подвеса, в то же время учитывая все шесть степеней свободы перемещения (6-DoF) подвешенного объекта. 6-DoF включает в себя три поступательных перемещения и три вращательных перемещения (вокруг центра массы) объекта. Если какая-либо из 6-DoF игнорируется, объект считается неустойчивым, что часто вызывает проблемы с позиционированием, неустойчивость и/или дополнительную передачу вибрации (часто через непредусмотренные другие точки контакта).
Решение с двумя маятниковыми пружинами по фиг. 4 является подходящим для конструкции в двумерной плоскости. Необходимо добавить дополнительную точку подвеса маятника, чтобы обеспечивать точку подвеса в третьем измерении.
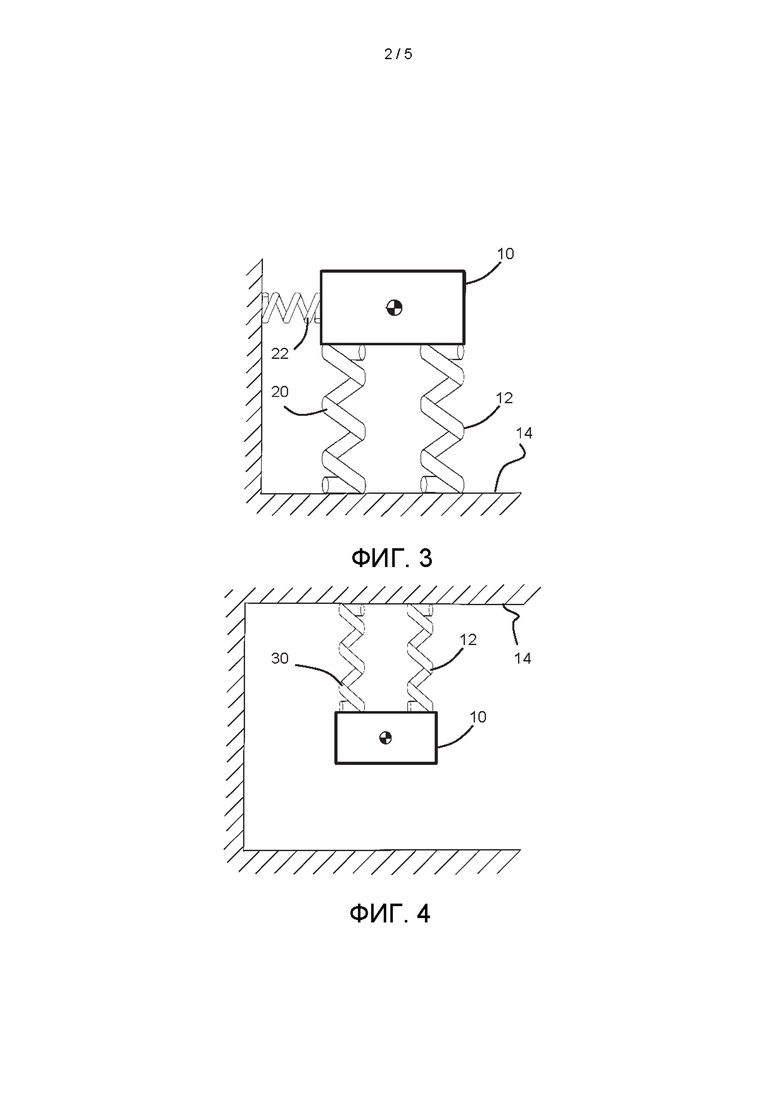
На фиг. 5 показана система пружинного подвеса для объекта 10 с использованием трех вертикальных пружин 50, подвешенных ниже неподвижных жесткиих точек 14 крепления. Объект можно считать материальной точкой. Объект хорошо выровнен, но любое возбуждение объекта будет приводить к большому горизонтальному перемещению и/или вращению вокруг вертикальной и горизонтальной осей.
Следовательно, существует потребность в улучшенном креплении подвеса.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение охарактеризовано в формуле изобретения.
Согласно примерам в соответствии с аспектом настоящего изобретения предложена система, содержащая:
корпус и
объект, закрепленный внутри корпуса посредством крепления, которое предназначено для демпфирования вибрации для указанного объекта, причем:
крепление содержит набор из по меньшей мере трех пружин, каждая из которых имеет верхний конец, соединенный с корпусом, и свисающий нижний конец;
верхние концы определяют вершины верхнего многоугольника;
нижние концы определяют вершины нижнего многоугольника;
объект удерживается нижними концами указанного набора пружин; и
в предназначенной для эксплуатации ориентации системы центр тяжести объекта расположен вдоль вертикальной линии, которая проходит через нижний многоугольник, а линия между верхним концом и нижним концом каждой пружины смещена от вертикали таким образом, что указанные линии сужаются внутрь между верхним многоугольником и нижним многоугольником.
Эта крепежная конструкция подвешивает объект, для которого требуется демпфирование вибрации, при помощи набора по меньшей мере из трех пружин (и, предпочтительно, точно из трех пружин). Пружины окружают объект, а нижние концы определяют устойчивую опорную плоскость. Объект удерживается посредством этих нижних концов. В частности, нижние концы указанного набора пружин определяют единственную физическую опору для объекта, т.е. он полностью подвешен сверху. Угол вертикального смещения означает, что пружины тянут объект к центру, создавая эффект маятника. Это придает опоре устойчивость и позволяет правильно выровнять объект в горизонтальной плоскости. Это устраняет необходимость в дополнительных опорах, пружинах или демпфирующих системах и, следовательно, уменьшает количество деталей.
Таким образом, объект свисает с набора пружин, такого как набор из трех расположенных под углом пружин, соединенных с нижним многоугольником, который функционирует в качестве стабилизирующей поверхности. Система использует хорошо известный маятниковый эффект для выравнивания подвешенного объекта в горизонтальной плоскости. Стабилизирующая поверхность обеспечивает стабилизацию объекта. Такая стабилизация устраняет необходимость в дополнительных опорах, что повышает эффективность подвески при меньшем количестве деталей.
Угол смещения относительно вертикали составляет, например, более 5 градусов, например более 10 градусов. Это применяют при нормальной эксплуатационной ориентации системы. Например, для системы, предназначенной для крепления на горизонтальной поверхности, такой как кухонная столешница, углы применяют при закреплении системы на горизонтальной поверхности.
Однако угол смещения относительно вертикали предпочтительно составляет менее 45 градусов, например менее 30 градусов.
Чем больше угол, тем больше сила пружины, которая требуется для удерживания объекта по вертикали, но тем больше стабилизирующие силы.
Центр тяжести объекта предпочтительно расположен ниже плоскости верхнего многоугольника. Таким образом, объект подвешен ниже верхнего многоугольника.
Направленная вверх вертикальная высота от плоскости нижнего многоугольника до центра тяжести предпочтительно составляет меньше минимального расстояния между центром тяжести, при его вертикальном проецировании на нижний многоугольник, и ребрами нижнего многоугольника. Это обеспечивает крепежную устойчивость против опрокидывания ребра нижнего многоугольника.
В одном примере центр тяжести объекта расположен выше плоскости нижнего многоугольника. В этом случае направленная вверх вертикальная высота является положительной и должна быть меньше минимального расстояния, как описано выше.
В другом примере центр тяжести объекта расположен ниже плоскости нижнего многоугольника. В этом случае направленная вверх вертикальная высота будет меньше нуля, что автоматически удовлетворяет требованию быть меньше минимального расстояния, как описано выше.
Верхний и нижний многоугольники предпочтительно представляют собой правильные многоугольники.
Система может содержать точно три пружины. Тогда верхний и нижний многоугольники представляют собой треугольники, предпочтительно, равносторонние треугольники.
Нижний конец каждой пружины может содержать опорную петлю, а объект содержит набор ножек, которые взаимодействуют с опорными петлями. Это упрощает сборку системы. Объект может быть просто размещен на нижних концах пружин (например, проволочных пружин) с использованием выемки или конуса, расположенных в ножках объекта.
Верхний конец каждой пружины может содержать крюк, а корпус содержит приемные области для размещения крюков. Это опять же упрощает сборку. Не требуется крепление болтами, зажим или вращательное зацепление пружин с корпусом, вместо этого их можно линейно сдвинуть на место.
Система содержит кофемашину. Объект содержит исполнительный механизм, который вибрирует при эксплуатации, такой как двигатель или компонент, который содержит в себе двигатель. Компонент, который содержит в себе двигатель, например, представляет собой кофемолку, вентилятор или насос.
Эти и другие аспекты настоящего изобретения будут очевидны из варианта (вариантов) осуществления изобретения, описанных здесь и далее, и будут объяснены со ссылками на эти варианты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения и более ясного представления того, как оно может быть реализовано на практике, далее сделана ссылка, только в качестве примера, на сопутствующие фигуры, на которых:
на фиг. 1 показан объект, закрепленный на верхней части пружины, которая закреплена на нижележащей опоре;
на фиг. 2 показан объект, подвешенный на пружине, которая свисает с опоры, расположенной выше;
на фиг. 3 показана модификация компоновки по фиг. 1 для предотвращения опрокидывания;
на фиг. 4 показана модификация компоновки по фиг. 2 для вращения вокруг точки крепления объекта и пружины;
на фиг. 5 показана система пружинного подвеса для объекта с использованием трех вертикальных пружин;
на фиг. 6 показан первый подход для повышения устойчивости компоновки по фиг. 5;
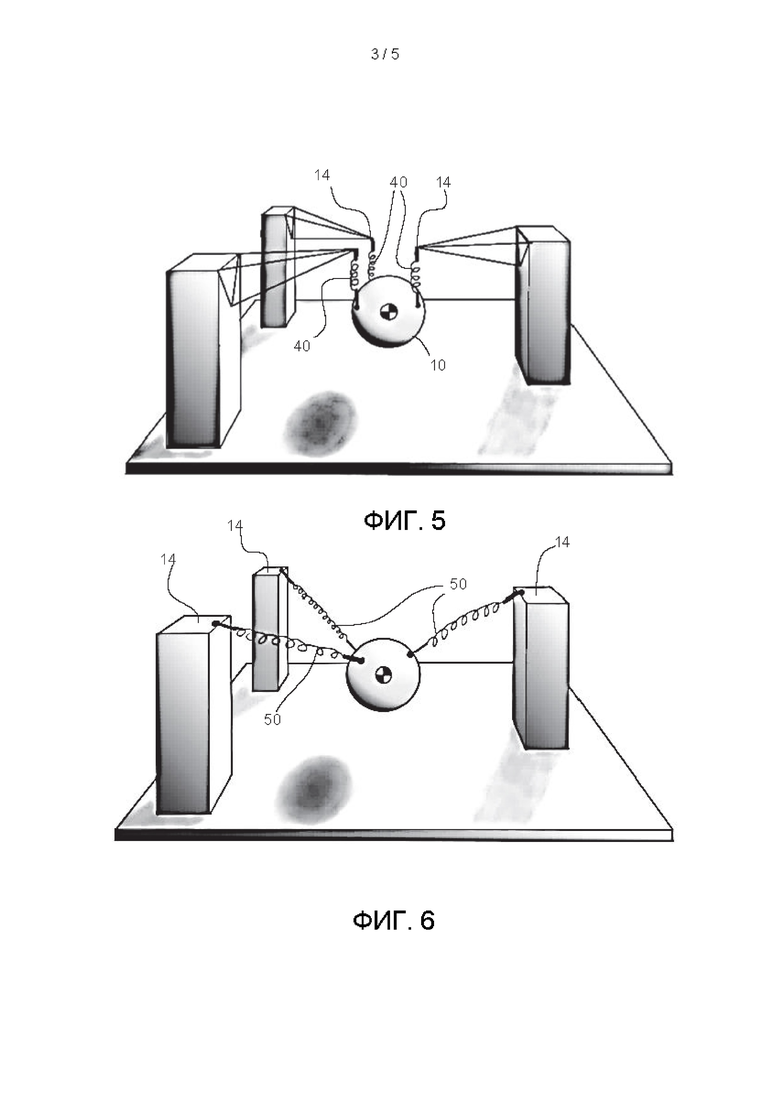
на фиг. 7 показана компоновка в соответствии с настоящим изобретением;
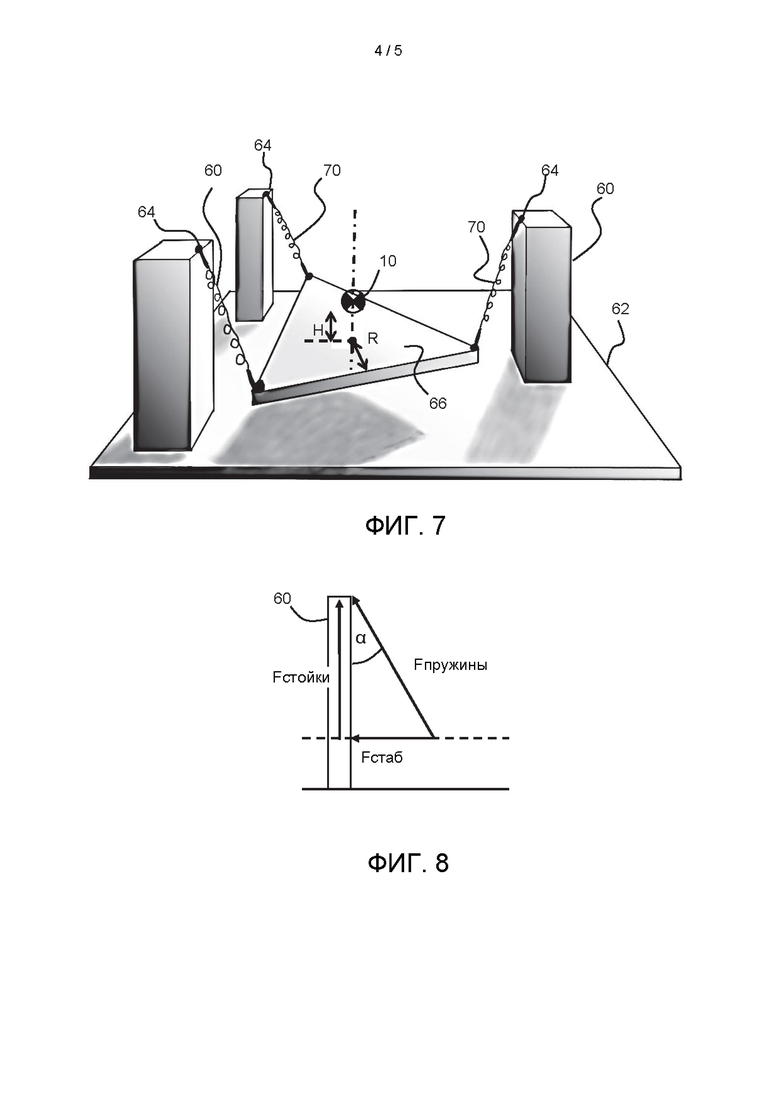
на фиг. 8 показаны силы, действующие в указанной системе;
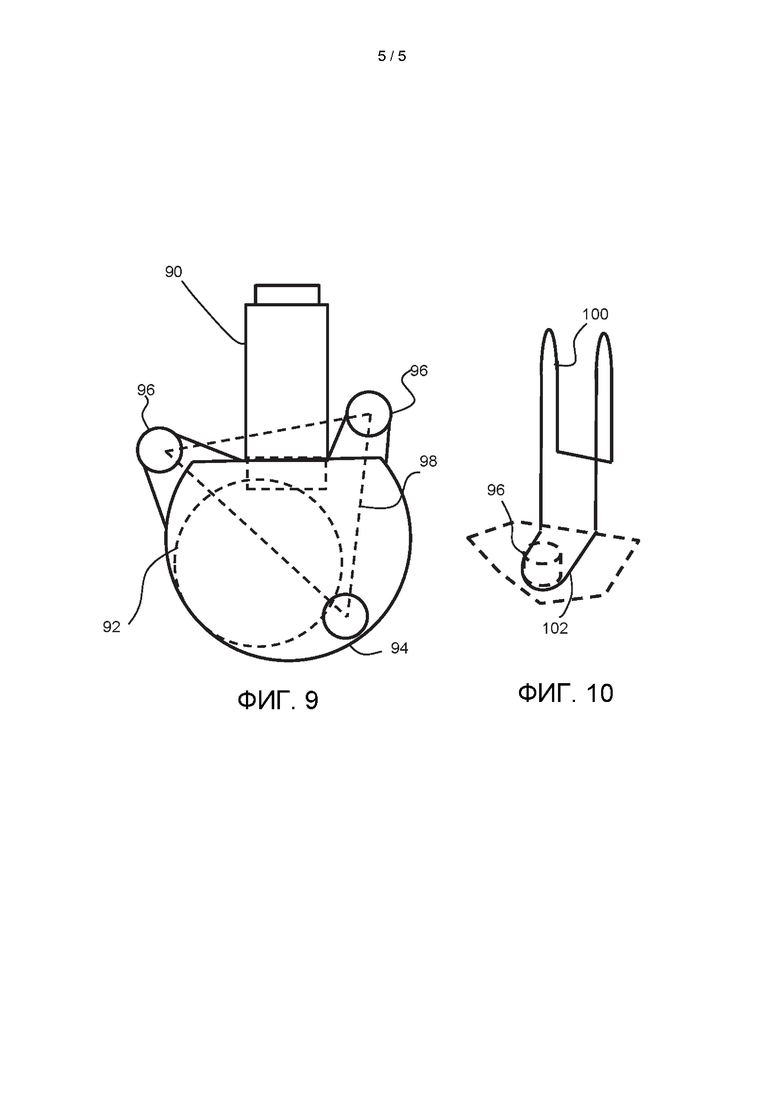
на фиг. 9 показан измельчитель зерен, если смотреть снизу; и
на фиг. 10 показана одна из пружин для удерживания измельчителя зерен по фиг. 9.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение будет описано со ссылкой на фигуры.
Следует понимать, что хотя подробное описание и конкретные примеры представляют приведенные для примера варианты осуществления устройств, систем и способов, они предназначены исключительно для целей иллюстрации и не предназначены для ограничения объема настоящего изобретения. Эти и другие признаки, аспекты и преимущества устройств, систем и способов согласно настоящему изобретению станут более понятными из нижеследующего описания, прилагаемой формулы изобретения и сопутствующих фигур. Следует понимать, что фигуры являются только схематическими и не обязательно выполнены в масштабе. Также следует понимать, что на всех фигурах одинаковые ссылочные обозначения используются для указания на одинаковые или аналогичные части.
В настоящем изобретении предложена система, в которой объект закреплен внутри корпуса посредством крепления, которое предназначено для демпфирования вибрации для указанного объекта. Крепление содержит набор из по меньшей мере трех пружин, каждая из которых имеет верхний конец, соединенный с корпусом, и свисающий нижний конец, на котором удерживается объект. Верхние концы определяют верхний многоугольник, а нижние концы определяют нижний многоугольник. Центр тяжести объекта расположен вдоль вертикальной линии, проходящей через нижний многоугольник, а пружины расположены под углом внутрь по направлению к нижнему многоугольнику.
Как рассмотрено выше со ссылкой на фиг. 5, для обеспечения хорошего выравнивания объекта могут быть использованы три вертикальные подвесные пружины, но любое возбуждение объекта приведет к большому горизонтальному перемещению и/или вращению вокруг вертикальной и горизонтальной осей.
На фиг. 6 показан первый подход для повышения устойчивости. Вместо подвеса объекта на вертикальных пружинах, пружины располагают под углом таким образом, что они прикладывают направленную наружу тянущую силу, а также удерживают вертикальный вес объекта. Комбинация этих направленных наружу сил противодействует перемещению объекта из его предназначенного положения в горизонтальной плоскости. Таким образом, это повышает устойчивость положения.
Однако устойчивость объекта к вращению остается проблемой.
Изобретение основано на расположении точек крепления для объекта дальше от его центра масс, создавая поверхность устойчивости, в сочетании с подходом с расположением пружины под углом по фиг. 6.
На фиг. 7 показана компоновка в соответствии с настоящим изобретением. Показана часть системы, содержащая корпус и объект 10, закрепленный внутри корпуса.
Корпус схематически представлен в виде трех опорных стоек 60 и основания 62. Верхние части стоек представляют собой верхние точки 64 крепления для набора из трех пружин 70. Каждая пружина 70 имеет верхний конец, соединенный с корпусом в точке 64 крепления, и свисающий нижний конец.
Верхние концы, то есть три точки 64 крепления, определяют вершины верхнего многоугольника, в этом примере треугольника, предпочтительно, равностороннего треугольника. Нижние концы пружин также определяют вершины нижнего многоугольника, в этом примере также треугольника и, предпочтительно, равностороннего треугольника.
Нижний многоугольник определяет поверхность 66 устойчивости. Однако она может представлять собой виртуальную поверхность в том смысле, что нет необходимости в реальной плоской опоре. Вместо этого многоугольник и виртуальная поверхность определяются тремя точками крепления на нижних концах пружин 70. Когда центр массы объекта размещают в этой поверхности устойчивости (или проецируют вертикально на эту поверхность устойчивости), объект не будет вращаться вокруг горизонтальных осей и, таким образом, сохраняет устойчивость. Чем больше (минимальный) радиус R, проходящий от центра масс до ребер нижнего многоугольника (ограничивающего поверхность устойчивости), тем более устойчивым становится объект.
Радиус R представляет собой наименьшее перпендикулярное расстояние от местоположения центра тяжести, проецируемого на плоскость поверхности устойчивости, и ребром нижнего многоугольника.
В общем, вращательный момент M вокруг центра масс делится на длину плеча, то есть радиус R, что приводит к малой силе, пытающейся вращать объект (если радиус R большой), пытаясь удлинить пружины.
Расположенные под углом пружины, используемые на фиг. 7 (а также показанные на фиг. 6), таким образом, стабилизируют объект относительно вращения вокруг вертикальной оси, а также стабилизируют положение объекта относительно перемещения по горизонтальным осям. В частности, стабилизация положения контролируется жесткостью пружины, а не трением в точках поворота. Расстояние R дополнительно стабилизирует объект относительно вращения вокруг горизонтальных осей.
Чем больше угол наклона пружин по отношению к вертикали, тем больше устойчивость. Однако эта повышенная устойчивость достигается за счет дополнительного требуемого натяжения пружины для удержания объекта на правильной высоте, поскольку для удерживания веса объекта действует только часть натяжения пружины.
На фиг. 8 показаны направления сил для вертикальной силы стойки Fстойки (направленная вверх сила, которую должна обеспечивать стойка, чтобы нести нагрузку объекта). Для каждой стойки она представляет собой одну треть веса объекта. Стабилизирующая сила Fстаб действует в горизонтальном направлении. Таким образом, требуется увеличение силы пружины Fпружины для поддержания той же вертикальной силы Fстойки, если угол α увеличивается для увеличения стабилизирующей силы Fстаб.
Расположенные под углом пружины приводят к сужению внутрь между верхним многоугольником и нижним многоугольником, то есть в этом примере верхний многоугольник является большим треугольником, чем нижний многоугольник. Расположенные под углом пружины притягивают объект к центру, создавая эффект маятника. Это обеспечивает устойчивость опоры и правильное выравнивание объекта в горизонтальной плоскости. Это устраняет необходимость в дополнительных опорах, пружинах или демпфирующих системах и, следовательно, уменьшает количество деталей.
Угол α смещения относительно вертикали пружин составляет, например, более 5 градусов, например, более 10 градусов. Например, он составляет менее 45 градусов, например менее 30 градусов.
Компоновка по фиг. 7 дает улучшенное механическое разъединение по сравнению со стандартным объектом, закрепленным на пружине или при резиновом крепежном решении. Конструкция уменьшает количество необходимых частей, избегая необходимости в дополнительных функциях для предотвращения несоосности или опрокидывания подвешенного объекта.
Основной подход состоит в подвешивании объекта с использованием наименьшего количества пружинных элементов, насколько это возможно, и расположении точек подвеса далеко друг от друга, чтобы создавать большую поверхность устойчивости, например треугольник.
Для компоновки по фиг. 7, в вертикальном направлении, центр массы объекта должен быть расположен ниже верхних точек 64 крепления пружин 70 таким образом, чтобы объект действительно был подвешен. Кроме того, вертикальное расстояние H, проходящее от центра масс объекта до плоскости нижнего многоугольника (в этом случае треугольника устойчивости) должно быть меньше радиуса R, как определено выше. Это гарантирует, что объект, расположенный на поверхности устойчивости, не опрокинется на своей плоскости устойчивости вдоль одного из ребер нижнего многоугольника.
Следует отметить, что центр масс объекта может быть расположен ниже плоскости нижнего многоугольника, и в этом случае расстояние H является отрицательным, так что условие H<R выполняется независимо от того, насколько далеко центр масс лежит ниже плоскости нижнего многоугольника.
Настоящее изобретение было испытано для крепления двигателя встроенного измельчителя зерен кофемашины.
На фиг. 9 показан измельчитель зерен, если смотреть снизу. Он содержит двигатель 90, который приводит в действие измельчающее колесо 92, расположенное внутри корпуса 94. Корпус имеет три опорные ножки 96, которые образуют нижний многоугольник 98. Крепление, например, способствует достижению снижения шума, составляющего приблизительно 10 дБ.
Одна из пружин показана на фиг. 10. Она содержит проволоку (в замкнутой форме), имеющую крюковую часть 100, расположенную в верхней части, и опорную петлю 102, расположенную в нижней части. Каждая опорная ножка измельчителя расположена на соответствующей опорной петле. Каждая опорная ножка, например, содержит выступ, например конический выступ, который проходит через опорную петлю 102.
Таким образом, пружина представляет собой проволочную петлю, а не винтовую пружину. Сила пружины в основном обусловлено изгибом в верхней части крюковой части. Крюковая часть 100, например, вдавливается (линейно) в паз корпуса кофемашины, а затем измельчитель зерен просто опирается на опорные петли 102. Внутренняя протяженность опорной петли определяет эффективный угол пружины. Таким образом, угол определяется между эффективной точкой контакта между опорной петлей и ножкой объекта и эффективной точкой контакта между крюковой частью 100 и корпусом.
Использование проволочной пружины является преимущественным, когда вокруг объекта, подлежащего подвешиванию, существует ограниченное пространство (особенно с учетом необходимых зазоров для функциональных испытаний и испытаний на падение). Проволочная пружина также способна избежать резонансных частот пружины в рабочем диапазоне частот объекта (например, измельчителя) для обеспечения достаточной виброизоляции для снижения шума.
Кроме того, система является простой в сборке с помощью простой операции укладки. Не требуется крепление болтами, зажим или вращательное зацепление пружин с корпусом. Вместо этого их можно сдвинуть на место. Конструкция пружины является такой, что объект размещается на нижних опорных петлях с простым интерфейсом, таким как выемка или конус, чтобы убедиться, что пружины и объект остаются соединенными.
Когда есть три пружины, они скомпонованы треугольником, поэтому в корпусе кофемашины есть три паза для размещения трех пружин вокруг области, где будет расположен измельчитель зерен.
Приведенный выше пример основан на использовании трех пружин, и это представляет собой минимальное количество компонентов. Однако может быть использовано более трех пружин, например, с квадратными верхними и нижними многоугольниками для четырех пружин, пятиугольными верхними и нижними многоугольниками для пяти пружин и т. д. Можно использовать до десяти пружин, но для достижения требуемой эффективности демпфирования предпочтительно использовать как можно меньше компонентов.
Настоящее изобретение представляет особый интерес для бытовых приборов, таких как машины для напитков, например, кофемашины. Оно может быть использовано для подвешивания любого двигателя или компонента, имеющего двигатель, такого как насос или измельчитель.
Разумеется, настоящее изобретение в целом применимо к любой кофемашине с вентилятором, насосом или двигателем, закрепленным с определенной ориентацией.
Другие варианты раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при практическом применении заявленного изобретения на основе изучения сопутствующих фигур, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает наличия других элементов или этапов, а грамматические показатели единственного числа не исключают множество.
Тот факт, что определенные меры упоминаются в отличных друг от друга зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой.
Если в формуле изобретения или описании использован термин «приспособлен для», то следует отметить, что этот термин является эквивалентом термина «выполнен с возможностью».
Никакие ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНАЯ УСТАНОВКА ДЛЯ ДЕМОНСТРАЦИИ СИЛЫ НАТЯЖЕНИЯ ВРАЩАЮЩЕЙСЯ ЦЕПОЧКИ | 2022 |
|
RU2800901C1 |
| СИСТЕМА Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2033371C1 |
| Способ определения положения центра тяжести массивных и крупногабаритных объектов сложной формы | 2022 |
|
RU2809111C1 |
| ГРУЗОВАЯ ПЛАТФОРМА | 1998 |
|
RU2141420C1 |
| ИНЕРЦИОННАЯ МЕЛЬНИЦА ДЛЯ ТОНКОГО ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ | 1991 |
|
RU2033857C1 |
| КОФЕМАШИНА, СНАБЖЕННАЯ УСТРОЙСТВОМ БЕЗОПАСНОСТИ ОТКРЫВАНИЯ КРЫШКИ БАКА ДЛЯ КОФЕЙНЫХ ЗЕРЕН | 2021 |
|
RU2829674C2 |
| ВЕРТОЛЕТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ | 2005 |
|
RU2358294C2 |
| Амортизированный гравиметр | 2022 |
|
RU2792153C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
Изобретение относится к кофемашине, имеющей объект, удерживаемый обеспечивающим демпфирование вибрации креплением. Объект закреплен внутри корпуса кофемашины посредством крепления, которое предназначено для демпфирования вибрации для указанного объекта. Крепление содержит набор из по меньшей мере трех пружин, каждая из которых имеет верхний конец, соединенный с корпусом, и свисающий нижний конец, на котором удерживается объект. Верхние концы определяют верхний многоугольник, а нижние концы определяют нижний многоугольник. Центр тяжести объекта расположен вдоль вертикальной линии, проходящей через нижний многоугольник, а пружины расположены под углом внутрь по направлению к нижнему многоугольнику. 14 з.п. ф-лы, 10 ил.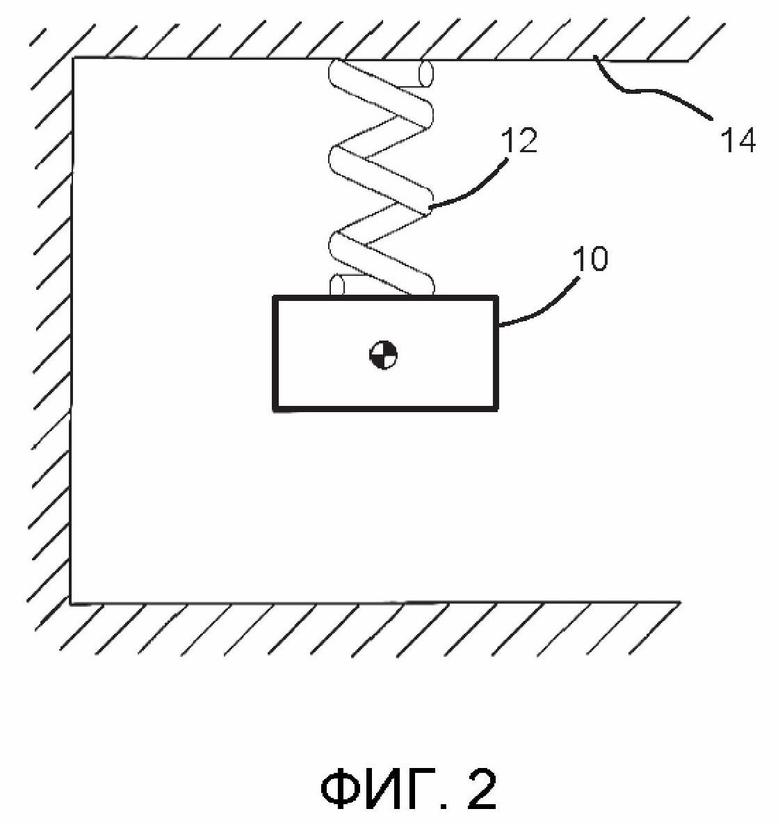
1. Кофемашина, содержащая:
корпус (60,62) и
объект (10), содержащий исполнительный механизм, который вибрирует при
эксплуатации, и закрепленный внутри корпуса посредством крепления, которое предназначено для демпфирования вибрации для указанного объекта, причем:
крепление содержит набор из по меньшей мере трех пружин (70), каждая из которых имеет верхний конец, соединенный с корпусом, и свисающий нижний конец;
верхние концы определяют вершины верхнего многоугольника;
нижние концы определяют вершины нижнего многоугольника (98);
объект (10) удерживается нижними концами указанного набора пружин; и
в предназначенной для эксплуатации ориентации кофемашины центр тяжести объекта расположен вдоль вертикальной линии, которая проходит через нижний многоугольник, а линия между верхним концом и нижним концом каждой пружины смещена от вертикали таким образом, что указанные линии сужаются внутрь между верхним многоугольником и нижним многоугольником.
2. Кофемашина по п. 1, в которой угол (α) смещения относительно вертикали составляет более 5 градусов.
3. Кофемашина по п. 1 или 2, в которой угол (α) смещения относительно вертикали составляет более 10 градусов.
4. Кофемашина по п. 1 или 2, в которой угол (α) смещения относительно вертикали составляет менее 45 градусов.
5. Кофемашина по п. 1 или 2, в которой угол (α) смещения относительно вертикали составляет менее 30 градусов.
6. Кофемашина по любому из пп. 1-5, в которой центр тяжести компонента расположен ниже плоскости верхнего многоугольника.
7. Кофемашина по любому из пп. 1-6, в которой направленная вверх вертикальная высота (H), проходящая от плоскости нижнего многоугольника до центра тяжести, составляет меньше минимального расстояния (R) между центром тяжести, при его вертикальном проецировании на нижний многоугольник, и ребрами нижнего многоугольника (98).
8. Кофемашина по любому из пп. 1-7, в которой центр тяжести объекта расположен выше плоскости нижнего многоугольника (98).
9. Кофемашина по любому из пп. 1-7, в которой центр тяжести объекта расположен ниже плоскости нижнего многоугольника (98).
10. Кофемашина по любому из пп. 1-9, в которой верхний и нижний многоугольники представляют собой правильные многоугольники.
11. Кофемашина по любому из пп. 1-10, содержащая точно три пружины (70).
12. Кофемашина по любому из пп. 1-11, в которой нижний конец каждой пружины содержит опорную петлю (102), а объект содержит набор ножек (96), которые взаимодействуют с опорными петлями (102).
13. Кофемашина по любому из пп. 1-12, в которой верхний конец каждой пружины содержит крюк (100), а корпус содержит приемные области для размещения крюков.
14. Кофемашина по любому из пп. 1-13, в которой объект содержит двигатель или компонент, который содержит в себе двигатель.
15. Кофемашина по любому из пп. 1-14, в которой объект содержит кофемолку.
| CN 103284606 B, 20.04.2016 | |||
| US 5308224 A1, 03.05.1994 | |||
| US 20020053632 A1, 09.05.2002 | |||
| US 20210364059 A1, 25.11.2021 | |||
| US 4253634 A1, 03.03.1981 | |||
| Машина для центробежного литья | 1979 |
|
SU852439A1 |
| БЫТОВОЕ ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2597537C2 |
| Способ получения производных простагландина | 1977 |
|
SU676162A3 |
| КОФЕЙНАЯ МАШИНА | 2013 |
|
RU2597578C2 |
| US 4464982 A1, 14.08.1984 | |||
| GB 553793 A, 07.06.1943 | |||
| US 20140270728 A1, 18.09.2014 | |||
| FR 1115329 A, | |||

