ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка заявляет приоритет согласно заявке на патент Китая № 202011107176.9, озаглавленной «Multi-sector data correction method and system for gamma imaging while drilling» и поданной 16 октября 2020 года, полное содержание которой включено в данный документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области геонавигации (или непрерывному геологическому сопровождению бурения скважины) при разведке нефти и газа, а именно к способу и системе многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения.
УРОВЕНЬ ТЕХНИКИ
Технология получения гамма-изображений является одной из основных в области каротажа в процессе бурения и геонавигации. Она позволяет анализировать пласт путем измерения интенсивности гамма-излучения в стволе скважины и играет важную роль в построении моделей пласта, повышая вероятность проникновения в пласты-коллекторы, способствуя увеличению добычи сырой нефти и т. д.
В частности, согласно этой технологии ствол скважины делится по окружности на множество секторов, в которых выполняются измерения с помощью гамма-датчика с гашением по азимуту, а затем производится трехмерное отображение интенсивности гамма-излучения в стволе скважины согласно данным этих секторов. Результаты можно использовать для расчета угла наклона пласта, таким образом выполняя бурение с квантованной геонавигацией. Однако существующая технология получения гамма-изображений имеет низкую точность и дает большую погрешность в расчете угла наклона пласта, поэтому не может обеспечить эффект геонавигации. Таким образом, в отрасли существует острая потребность в способе коррекции для повышения точности изображений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Одной из технических проблем, решаемых настоящим изобретением, является предоставление технического решения, способного обеспечить получение высокоточных гамма-изображений, тем самым позволяя осуществлять высокоточное бурение с геонавигацией и оценку пласта.
Для решения вышеуказанных технических проблем вариант реализации настоящего изобретения обеспечивает способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, включающий этапы: (a) разделение каждого сектора гамма-изображения на множество зон подсчета; (b) подсчет количества действительных счетных импульсов для каждой зоны подсчета в заданный интервал времени во время измерения в процессе бурения; (c) построение множества векторов измерений, характеризующих результаты измерений во всех секторах на основе значения зарегистрированного количества для каждой зоны подсчета; (d) построение матрицы коррекции с условным числом меньше заданного значения, при этом указанная матрица коррекции используется для коррекции данных измерений; и (e) вычисление интенсивности гамма-излучения для каждого сектора, в котором проводились измерения, с помощью множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных измерений каждого сектора, в котором проводились измерения, для каждого заданного интервала времени.
В варианте реализации на указанном этапе (с) все зоны подсчета делятся на множество групп, и значение зарегистрированного количества для каждой зоны подсчета в каждой группе используется для построения соответствующего вектора измерений. Количество групп, на которые разделены зоны подсчета, равно количеству зон подсчета, образованных делением каждого сектора на равные части, и каждая группа зон подсчета состоит из зон подсчета, дискретно (т. е. ненепрерывно) выделяемых из каждого сектора. Никакие смежные зоны подсчета в одном и том же секторе не входят в одну и ту же группу.
В варианте реализации на указанном этапе (е) интенсивность G гамма-излучения для каждого сектора, в котором проводились измерения, вычисляется следующим образом:

где Mn обозначает nй вектор измерений, γ - матрица коррекции,  а γn обозначает nю матрицу оптимизации.
а γn обозначает nю матрицу оптимизации.
В варианте реализации на указанном этапе (с) все зоны подсчета делятся на две группы, и первый вектор измерений и второй вектор измерений строятся в соответствии со значением зарегистрированного количества в единицу времени для каждой зоны подсчета в каждой группе, при этом каждая группа зон подсчета образована путем дискретного выделения зон подсчета из последовательных зон подсчета, расположенных в направлении по окружности, причем никакие смежные зоны подсчета не входят в одну и ту же группу. Указанный первый вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета в первой группе зон подсчета, причем эти значения расположены в последовательности, соответствующей зонам подсчета в направлении по окружности. Указанный второй вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета во второй группе зон подсчета, причем эти значения располагаются таким же образом, как и в первом векторе измерений и с той же начальной точкой.
В варианте реализации этап построения указанной матрицы коррекции включает: определение количества единиц в матрице коррекции на основе количества групп всех зон подсчета; задание коэффициента коррекции и множества коэффициентов коррекции, при этом количество коэффициентов коррекции равно сумме количества элементов первого вектора измерений и второго вектора измерений; построение на основе коэффициента коррекции и множества коэффициентов коррекции матрицы единиц коррекции для каждого вектора измерений, тем самым формируя матрицу коррекции; и определение на основе вектора, составленного из указанного множества коэффициентов коррекции в качестве независимой переменной, посредством алгоритма оптимизации оптимальной независимой переменной, для которой условное число матрицы коррекции достигает или приближается к глобальному минимуму, тем самым получая оптимальную матрицу коррекции с оптимальной независимой переменной.
В одном варианте реализации на указанном этапе (d) матрица γ коррекции с условным числом меньше 10 строится следующим образом:
где γ1 выражается следующим образом:
а γ2 выражается следующим образом:
где n обозначает количество секторов, в которых проводятся измерения,  - коэффициент коррекции, а
- коэффициент коррекции, а  - вектор коэффициентов коррекции.
- вектор коэффициентов коррекции.
В варианте реализации на указанном этапе (е) интенсивность G гамма-излучения для каждого сектора, в котором проводились измерения, вычисляется следующим образом:

где М1 и M2 обозначают первый и второй векторы измерений, соответственно, а γ обозначает матрицу коррекции после оптимизации.
В соответствии с другим аспектом настоящего изобретения обеспечивается система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, содержащая: модуль разделения зон подсчета, выполненный с возможностью разделения каждого сектора гамма-изображения на множество зон подсчета; модуль регистрации импульсов, выполненный с возможностью подсчета количества действительных счетных импульсов для каждой зоны подсчета в заданный интервал времени во время измерения в процессе бурения; модуль построения векторов измерений, выполненный с возможностью построения множества векторов измерений, характеризующих результаты измерений во всех секторах на основе значения зарегистрированного количества для каждой зоны подсчета; модуль построения матрицы коррекции, выполненный с возможностью построения матрицы коррекции с условным числом, меньшим заданного значения, с использованием алгоритма оптимизации, при этом указанная матрица коррекции используется для коррекции данных измерений; и модуль вычисления интенсивности гамма-излучения, выполненный с возможностью вычисления интенсивности гамма-излучения для каждого сектора, в котором проводились измерения, с помощью множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных измерения сектора, в котором проводились измерения, для каждого заданного интервала времени.
В варианте реализации модуль построения векторов измерений выполнен с возможностью разделения всех зон подсчета на множество групп и построения соответствующего вектора измерений со значением зарегистрированного количества для каждой зоны подсчета в каждой группе. Количество групп, на которые разделены зоны подсчета, равно количеству зон подсчета, образованных делением каждого сектора на равные части, и каждая группа зон подсчета состоит из зон подсчета, дискретно (т. е. ненепрерывно) выделяемых из каждого сектора. Никакие смежные зоны подсчета в одном и том же секторе не входят в одну и ту же группу.
В варианте реализации модуль вычисления интенсивности гамма-излучения выполнен с возможностью вычисления интенсивности G гамма-излучения для каждого сектора, в котором проводились измерения, следующим образом:
где Mn обозначает nй вектор измерений, γ - матрица коррекции, а γn обозначает nю матрицу оптимизации.
В варианте реализации модуль построения векторов измерений выполнен с возможностью разделения всех зон подсчета на две группы и построения первого вектора измерений и второго вектора измерений в соответствии со значением зарегистрированного количества в единицу времени для каждой зоны подсчета в каждой группе, при этом каждая группа зон подсчета образована путем дискретного выделения зон подсчета из последовательных зон подсчета, расположенных в направлении по окружности, причем никакие смежные зоны подсчета не входят в одну и ту же группу. Указанный первый вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета в первой группе зон подсчета, причем эти значения расположены в последовательности, соответствующей зонам подсчета в направлении по окружности. Указанный второй вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета во второй группе зон подсчета, причем эти значения располагаются таким же образом, как и в первом векторе измерений и с той же начальной точкой.
В варианте реализации модуль построения матрицы коррекции выполнен с возможностью: определения количества единиц в пределах матрицы коррекции на основе количества групп всех зон подсчета; задания коэффициента коррекции и множества коэффициентов коррекции; построения на основе коэффициента коррекции и множества коэффициентов коррекции матрицы единиц коррекции для каждого вектора измерений, тем самым формируя матрицу коррекции; и определения на основе вектора, составленного из указанного множества коэффициентов коррекции в качестве независимой переменной, посредством алгоритма оптимизации оптимальной независимой переменной, для которой условное число матрицы коррекции достигает или приближается к глобальному минимуму, тем самым получая оптимальную матрицу коррекции с оптимальной независимой переменной. Количество коэффициентов коррекции равно сумме количества элементов первого вектора измерений и второго вектора измерений.
В варианте реализации модуль построения матрицы коррекции выполнен с возможностью формирования матрицы γ коррекции с условным числом меньше 10 следующим образом:
где γ1 выражается следующим образом:
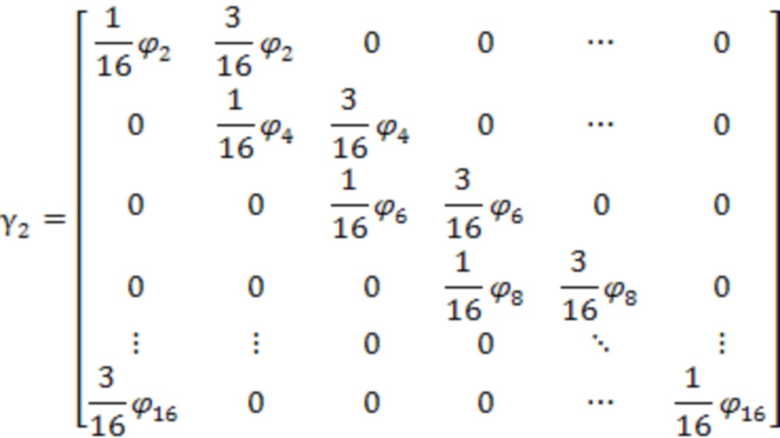
а γ2 выражается следующим образом:
где n обозначает количество секторов, в которых проводятся измерения, - коэффициент коррекции, а - вектор коэффициентов коррекции.
В варианте реализации модуль вычисления интенсивности гамма-излучения выполнен с возможностью вычисления интенсивности G гамма-излучения для каждого сектора, в котором проводились измерения, следующим образом:
где М1 и M2 обозначают первый и второй векторы измерений, соответственно, а γ обозначает матрицу коррекции.
В соответствии с еще одним аспектом настоящего изобретения обеспечено компьютерное устройство, содержащее процессор и память, причем в указанной памяти хранится по меньшей мере одна инструкция, по меньшей мере одна программа, набор кодов или набор инструкций. Указанная по меньшей мере одна инструкция, по меньшей мере одна программа, указанный набор кодов или указанный набор инструкций загружаются и выполняются указанным процессором для выполнения способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, как указано выше.
В соответствии с еще одним аспектом настоящего изобретения обеспечен машиночитаемый носитель данных, на котором хранится по меньшей мере одна инструкция, по меньшей мере одна программа, набор кодов или набор инструкций. Указанная по меньшей мере одна инструкция, по меньшей мере одна программа, указанный набор кодов или указанный набор инструкций загружаются и выполняются указанным процессором для выполнения способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, как указано выше.
По сравнению с предшествующим уровнем техники один или большее количество вариантов реализации вышеуказанных технических решений могут обеспечить следующие преимущества или выгоды. Варианты реализации настоящего изобретения обеспечивают способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, в котором модель подсчета вводится, а затем оптимизируется с помощью матрицы коррекции, чтобы получить более точные данные об интенсивности гамма-излучения в секторах пласта. С помощью этого способа могут быть устранены такие проблемы, связанные с вращением бурильного инструмента искажения измерений на гамма-изображениях, получаемых в процессе бурения, и т. п., могут быть улучшены результаты измерения инструмента и повышена точность вычисления угла наклона пласта. Соответственно, может быть достигнуто высокоточное бурение с геонавигацией.
Другие признаки и преимущества настоящего изобретения будут изложены в последующем описании и частично будут очевидны из описания или могут быть изучены при реализации технического решения согласно настоящему изобретению. Цели и другие преимущества настоящего изобретения могут быть реализованы и достигнуты с помощью конструкций и/или способа, конкретно указанных в описании, формуле изобретения и в графических материалах.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Прилагаемые графические материалы используются для обеспечения более точного понимания технического решения согласно настоящей заявке или известного уровня техники и составляют часть описания. Вместе с вариантами реализации настоящего изобретения графические материалы, иллюстрирующие варианты реализации, предназначены для пояснения технического решения согласно настоящему изобретению, но не представляют собой какое-либо ограничение технического решения согласно настоящему изобретению. В прилагаемых графических материалах:
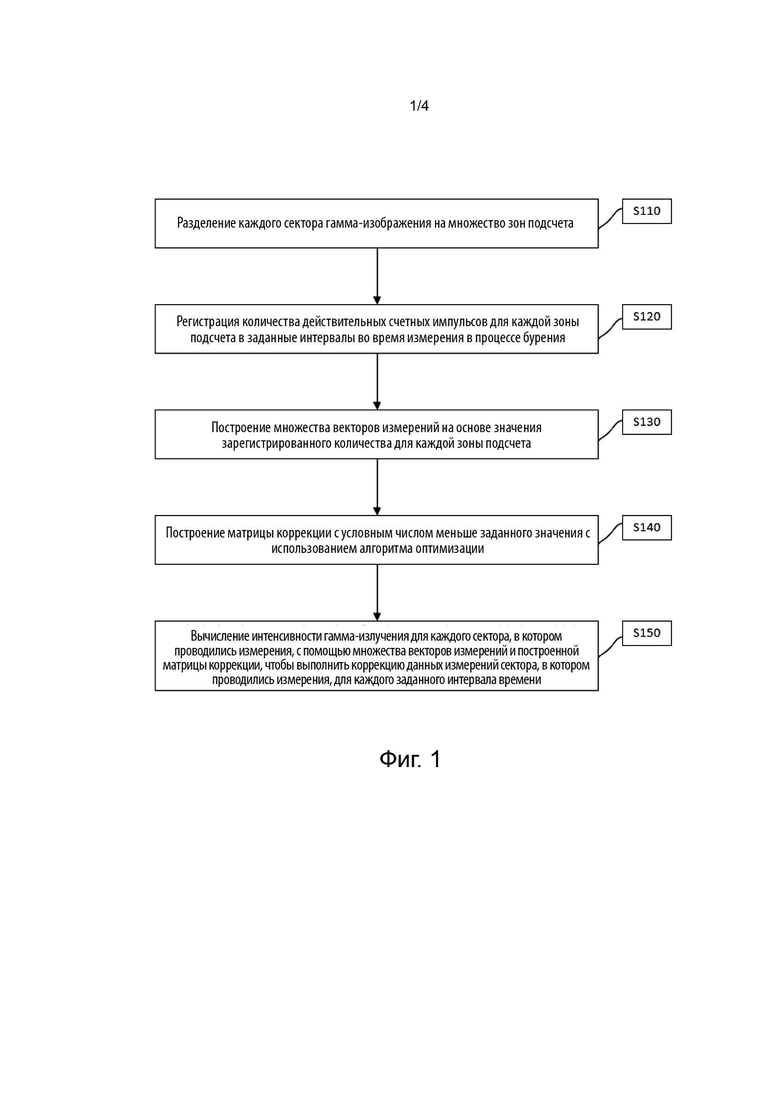
Фиг. 1 схематически иллюстрирует упрощенную блок-схему способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, в соответствии с вариантом реализации настоящего изобретения;
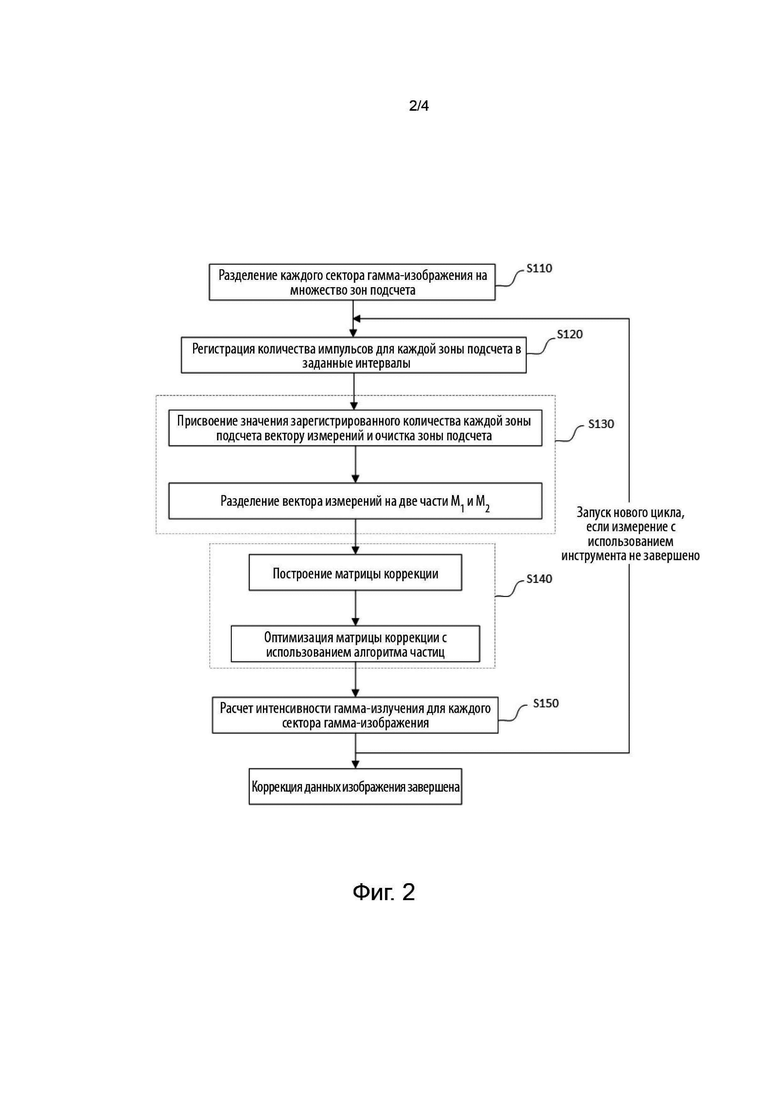
Фиг. 2 схематически иллюстрирует конкретную блок-схему способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, в соответствии с вариантом реализации настоящего изобретения;
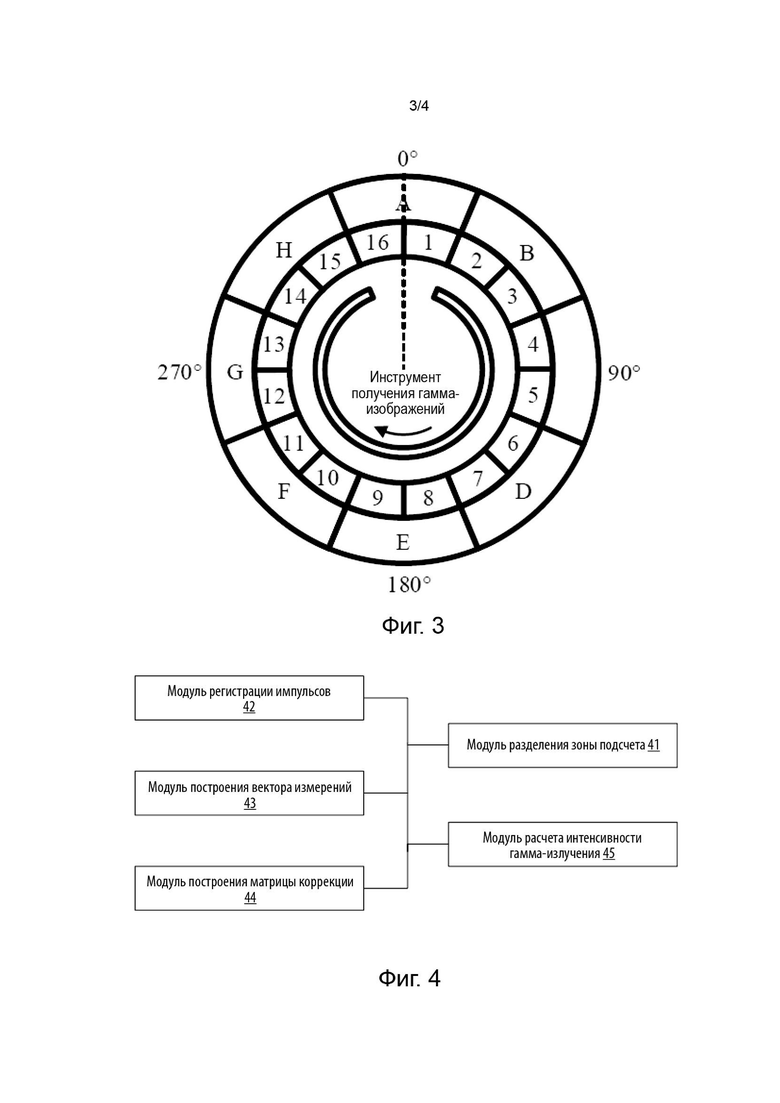
Фиг. 3 схематически иллюстрирует области подсчета в восьми секторах, приведенных в качестве примера, согласно варианту реализации настоящего изобретения;
Фиг. 4 схематически иллюстрирует функциональную концепцию системы многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, в соответствии с вариантом реализации настоящего изобретения;
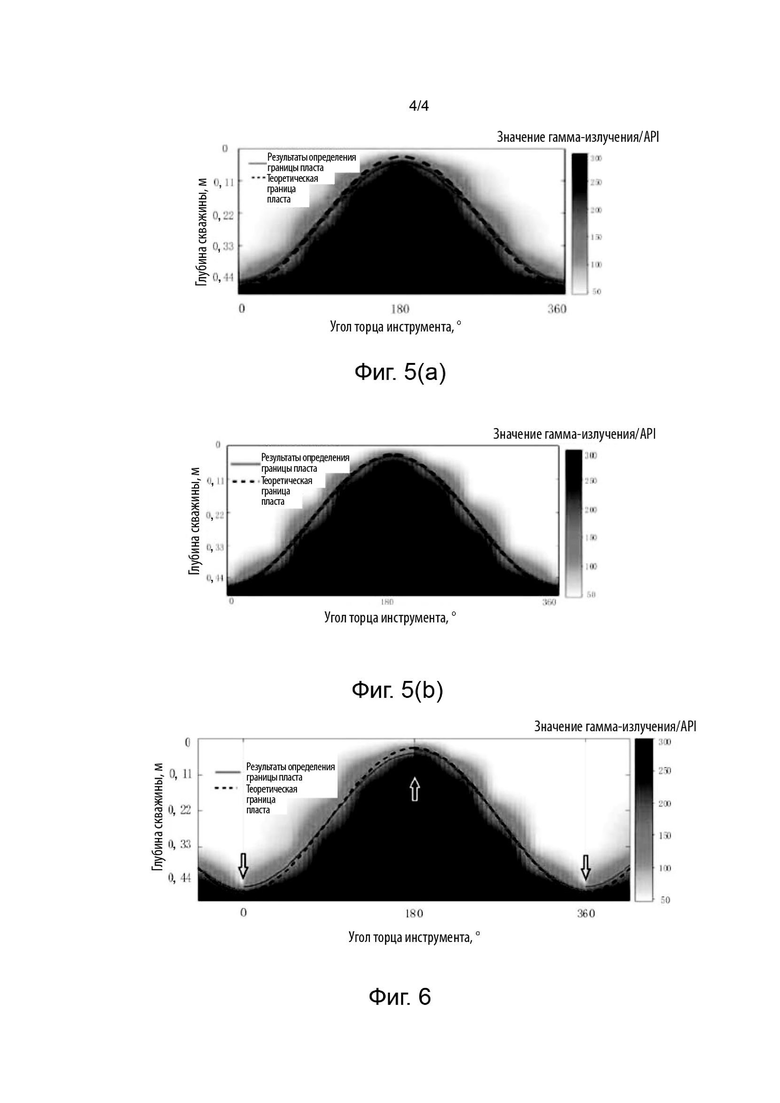
Фиг. 5(a) и Фиг. 5(b) схематически иллюстрируют результаты формирования изображений без использования и с использованием способа многосекторной коррекции данных в соответствии с вариантом реализации настоящего изобретения, соответственно; и
Фиг. 6 схематически иллюстрирует сравнение карт визуализации и результатов определения границ пласта до и после использования способа многосекторной коррекции данных согласно варианту реализации настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Метод реализации настоящего изобретения будет подробно объяснен со ссылкой на варианты реализации и прилагаемые графические материалы, благодаря чему можно будет полностью понять, как решить техническую проблему с помощью технических средств в соответствии с настоящим изобретением, реализовать техническое решение с достижением соответствующих технических результатов. Все варианты реализации и определенные в них технические признаки могут быть объединены вместе, если нет противоречий, и все технические решения, полученные таким образом, подпадают под объем охраны настоящего изобретения.
Кроме того, этапы, показанные на блок-схеме в графических материалах, могут выполняться в компьютерной системе, содержащей, например, набор исполняемых компьютером инструкций. Кроме того, хотя на блок-схеме показана логическая последовательность, в некоторых случаях показанные или описанные этапы могут выполняться в порядке, отличном от проиллюстрированного в настоящем документе.
Первый вариант реализации
Фиг. 1 схематически иллюстрирует блок-схему способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, в соответствии с вариантом реализации настоящего изобретения. Конкретные этапы этого варианта реализации описаны ниже со ссылкой на Фиг. 1.
Как показано на Фиг. 1, на этапе S110 каждый сектор гамма-изображения делится на множество зон подсчета.
В одном варианте реализации на этапе S110 каждый сектор делится на равные части для образования множества зон подсчета, причем общее количество этих зон подсчета четно кратно количеству секторов.
В предпочтительном варианте реализации настоящего изобретения каждый из секторов гамма-изображения разделен поровну с образованием множества зон подсчета, причем общее количество указанных зон подсчета в два раза превышает количество секторов, в которых будут выполняться измерения, и каждая полученная путем деления зона подсчета нумеруется. Например, из восьми секторов A, B, C, D, E, F, G, H, показанных на Фиг. 3, каждый сектор делится поровну на две зоны подсчета с получением, таким образом, 16 зон подсчета, которые получают порядковые номера 1, 2, 3, ..., 16, соответственно. Понятно, что каждый сектор гамма-изображения может быть разделен не только на две зоны подсчета, но и на другое количество зон подсчета, например на три, четыре и т. п., в зависимости от фактических потребностей, в отношении которых в данном варианте реализации не предусмотрено ограничений. Кроме того, количество секторов, в которых выполняются измерения, также может быть различным, и для удобства в этом варианте реализации принято восемь секторов, в которых выполняются измерения.
На этапе S120 количество действительных счетных импульсов для каждой зоны подсчета регистрируется в заданные интервалы во время измерения в процессе бурения (MWD, от англ. measurement-while-drilling).
В частности, если устройство измерения естественного гамма-излучения (например, датчик гамма-излучения) обнаруживает действительный счетный импульс во время измерения в процессе бурения, регистрируется последовательный номер зоны подсчета, соответствующей данному торцу инструмента. Интервал регистрации, например от 5 до 1000 секунд, задается заранее. При выполнении MWD зарегистрированное количество для каждой зоны подсчета, т. е. количество раз, когда обнаруживается действительный счетный импульс в каждой зоне подсчета, регистрируется отдельно для каждого заданного интервала времени.
На этапе S130 выполняется построение множества векторов измерений на основе зарегистрированного количества для каждой зоны подсчета. Каждый из этих векторов измерений используется для характеристики результатов измерения всех секторов.
В частности, все зоны подсчета разделены на множество групп, причем зарегистрированное количество за единицу времени для каждой зоны подсчета в каждой группе используется для построения соответствующего вектора измерений. Количество групп, на которые разделены зоны подсчета, такое же, как и зон подсчета, на которые разделен каждый сектор, и каждая группа зон подсчета состоит из зон подсчета, дискретно выделенных из каждого сектора, при этом никакие смежные зоны подсчета в одном секторе не входят в одну группу.
Предпочтительно, как показано на Фиг. 2, на этапе S110 каждый сектор делится поровну с образованием двух зон подсчета. Таким образом, на этапе S130 все области подсчета делятся на две группы, первый вектор измерений M1 и второй вектор измерений M2 строятся соответственно зарегистрированному количеству за единицу времени для каждой зоны подсчета в каждой группе. Когда зоны подсчета сгруппированы, следует убедиться в том, что никакие смежные зоны подсчета не находятся в одной группе. То есть каждая группа зон подсчета формируется путем дискретного выделения зон подсчета из последовательных зон подсчета, расположенных в направлении вдоль окружности, т. е. группа формируется с зонами подсчета, разнесенными друг от друга. На этом этапе и первый вектор измерений M1, и второй вектор измерений M2 являются одномерными векторами. Что касается первого вектора измерений M1, каждая его векторная единица представляет собой значение зарегистрированного количества в единицу времени для каждой зоны подсчета в первой группе зон подсчета, при этом указанные значения расположены в последовательности, соответствующей зонам подсчета в направлении по окружности, например, по часовой стрелке или против часовой стрелки. Что касается второго вектора измерений M2, каждая его векторная единица представляет собой значение зарегистрированного количества в единицу времени для каждой зоны подсчета во второй группе зон подсчета, причем указанные значения расположены так же, как и у первого вектора измерений M1 и с той же начальной точкой. Если значения первого вектора измерений M1 располагаются по часовой стрелке как зоны подсчета, соответствующие первому вектору измерений M1, значения второго вектора измерений M2 также расположены по часовой стрелке как зоны подсчета, соответствующие второму вектору измерений M2.
Кроме того, если каждый сектор разделен на равные части, т. е. три или четыре зоны подсчета на этапе S110, на этапе S130 должны быть построены три или четыре вектора измерений с одинаковым количеством зон подсчета в каждом секторе. С точки зрения практического применения предпочтительно разделить каждый сектор поровну на две или четыре зоны подсчета.
На этапе S140 матрица γ коррекции с условным числом меньше заданного значения строится с использованием алгоритма оптимизации, причем матрица коррекции используется для коррекции фактически собранных данных измерений.
На Фиг. 2 приведен пример, соответствующий случаю, когда каждый сектор разделен на две зоны подсчета, как указанно выше. В этом случае в процедуре построения матрицы коррекции сначала определяют количество единиц в строящейся матрице коррекции исходя из количества групп всех зон подсчета. Затем задают коэффициент коррекции и множество коэффициентов коррекции, при этом количество коэффициентов коррекции равно сумме количества элементов первого вектора измерений и второго вектора измерений. Затем в соответствии с заданными коэффициентом коррекции и множеством коэффициентов коррекции строят матрицу единиц коррекции для каждого вектора измерений, тем самым формируя матрицу коррекции. Наконец, на основе вектора, составленного из указанного множества коэффициентов коррекции в качестве независимой переменной, определяют посредством алгоритма оптимизации оптимальную независимую переменную, для которой условное число матрицы коррекции достигает или приближается к глобальному минимуму, таким образом получая оптимальную матрицу коррекции с текущей оптимальной независимой переменной.
Предпочтительно на этом этапе матрица γ коррекции с условным числом меньше 10 строят следующим образом:
(1)
где γ1 выражается следующим образом:
а γ2 выражается следующим образом:
где n обозначает количество секторов, в которых проводятся измерения с помощью инструмента получения гамма-изображений, - коэффициент коррекции, а - вектор коэффициентов коррекции.
Предпочтительно, чтобы при использовании в качестве независимой переменной, вектор параметров ϕ корректируется посредством алгоритма оптимизации поиска максимального значения. Например, вектор параметров ϕ, который активирует условное число  для
для  , достигает или приближается к глобальному минимальному значению, которое не должно быть больше 100, может быть найдено алгоритмом частиц, так что векторы [ϕ1, ϕ2, ϕ3, …, ϕ2n], удовлетворяющие условию, вносятся в матрицу
, достигает или приближается к глобальному минимальному значению, которое не должно быть больше 100, может быть найдено алгоритмом частиц, так что векторы [ϕ1, ϕ2, ϕ3, …, ϕ2n], удовлетворяющие условию, вносятся в матрицу  , формируя тем самым оптимальную матрицу коррекции.
, формируя тем самым оптимальную матрицу коррекции.
В другом варианте реализации, если на этапе S130 определены четыре вектора измерений, выражение (1) затем преобразуется в  . Таким образом, четыре матрицы γ1, γ2, γ3 и γ4, как указано в следующих формулах, являются необходимыми, при этом их коэффициенты также корректируются. Путем коррекции вектора параметров ϕ с использованием алгоритма частиц так, что условное число
. Таким образом, четыре матрицы γ1, γ2, γ3 и γ4, как указано в следующих формулах, являются необходимыми, при этом их коэффициенты также корректируются. Путем коррекции вектора параметров ϕ с использованием алгоритма частиц так, что условное число  для
для  достигает или приближается к глобальному минимальному значению, которое обычно не превышает 100, векторы, удовлетворяющие условию, подставляются в приведенную выше измененную матрицу коррекции.
достигает или приближается к глобальному минимальному значению, которое обычно не превышает 100, векторы, удовлетворяющие условию, подставляются в приведенную выше измененную матрицу коррекции.
Хотя, как показано на Фиг. 2, можно снова создавать новую матрицу коррекции каждый раз, когда корректируется интенсивность гамма-излучения сектора (этап S140), в других вариантах реализации также возможно продолжать использовать матрицу коррекции, построенную при выполнении коррекции данных в первый раз, что также имеет точность расчета, отвечающую основным требованиям, вместо того, чтобы строить каждый раз новую матрицу коррекции. Настоящее изобретение не будет ограничено в этой связи. Кроме того, матрица коррекции может быть построена другими способами, отличными от вышеизложенного, в зависимости от фактических условий. Например, в принципе условное число должно быть по меньшей мере меньше 100, или матрица коррекции для случая, когда каждый сектор разделен на четыре зоны подсчета, как указано выше, может быть преобразована в матрицу коррекции для случая, когда каждый сектор разделен на три зоны подсчета, что также входит в объем настоящего изобретения.
На этапе S150 интенсивность гамма-излучения каждого сектора, в котором проводились измерения, вычисляют с использованием множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных измерений сектора, в котором проводились измерения, в каждом заданном временном интервале.
Интенсивность G гамма-излучения каждого сектора, в котором выполнялись измерения, рассчитывается по следующей формуле:
(4)
где Mn обозначает nй вектор измерений, γ - матрица коррекции, а γn обозначает nю матрицу оптимизации.
При построении двух векторов измерений интенсивность G гамма-излучения каждого сектора, в котором выполнялись измерения, рассчитывается с использованием первого вектора измерений M1, второго вектора измерений M2 и матрицы γ коррекции.
В частности, интенсивность G гамма-излучения каждого сектора, в котором проводились измерения, рассчитывается по следующей формуле:
 .
.
В случае построения четырех векторов измерений формула преобразуется следующим образом:

Таким образом, в соответствии со способом многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, предложенным в варианте реализации настоящего изобретения, модель подсчета вводится, а затем оптимизируется с помощью матрицы коррекции, чтобы получить более точные данные об интенсивности гамма-излучения в секторах пласта. С помощью этого способа можно устранить искажение динамических измерений, вызванное вращением прибора MWD, что повысит точность расчета угла наклона пласта как в теоретических пределах, так и в практических применениях, а также обеспечит прочную основу для высокоточной технологии геонавигации и даже интеллектуальной технологии бурения.
Пример
Чтобы лучше понять технический способ настоящего изобретения, конкретные этапы использования вышеуказанного способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, будут проиллюстрированы далее с использованием восьми секторов, как показано на Фиг. 3 в качестве примера.
На этапе 1, в соответствии с общепринятой в отрасли практикой, восемь секторов, в которых будут проводиться измерения с получением гамма-изображений в процессе бурения, обозначены как A, B, C, ..., H по порядку, и каждый сектор, в котором будут выполняться измерения, делится на две зоны подсчета, пронумерованные как 1, 2, 3, …, 16 по порядку, как показано на Фиг. 3.
На этапе 2 во время работы прибора формирования гамма-изображений всякий раз, когда схема сбора данных получает действительный сигнал подсчета от датчика гамма-излучения, процессор регистрирует текущую торцевую поверхность инструмента и добавляет 1 к значению зарегистрированного количества для зоны подсчета, соответствующей торцу инструмента.
На этапе 3 каждые 32 секунды значение подсчета текущей зоны подсчета присваивается вектору M, где M=[m1, m2, m3, …, m16], m1 соответствует значению зарегистрированного количества импульсов в первой зоне подсчета, m2 соответствует значению зарегистрированного количества импульсов во второй зоне подсчета и т. д. После завершения такого присвоения значение зарегистрированного количества зоны подсчета обнуляется.
На этапе 4 вектор M делят на два вектора измерений, т. е. M1 и M2, где M1=[m1, m3, m5, …, m15] и M2=[m2, m4, m6, …, m16].
На этапе 5 выполняют построение матрицы коррекции  , где:
, где:
На этапе 6 минимальное значение , которое должно быть меньше 10, находят с помощью алгоритма частиц с  в качестве переменных. Затем векторы , удовлетворяющие условию, вносят в матрицу γ для построения оптимальной матрицы коррекции.
в качестве переменных. Затем векторы , удовлетворяющие условию, вносят в матрицу γ для построения оптимальной матрицы коррекции.
На этапе 7 интенсивность гамма-излучения  для каждого сектора рассчитывают по формуле:
для каждого сектора рассчитывают по формуле:
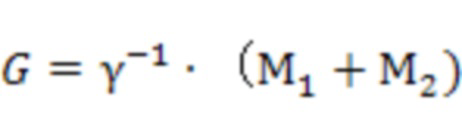 .
.
На этапе 8 процедуру с этапа 3 по этап 7 повторяют непрерывно, таким образом получая скорректированную интенсивность гамма-излучения для пласта из восьми секторов.
Фиг. 5(a) схематически иллюстрирует результаты формирования изображений без использования способа многосекторной коррекции данных в соответствии с вариантом реализации настоящего изобретения, а Фиг. 5(b) схематически иллюстрирует результаты формирования изображений при использовании способа многосекторной коррекции данных в соответствии с вариантом реализации настоящего изобретения. Как показано на Фиг. 5(а), гамма-изображение искажено вследствие вращения, в результате чего определенная граница пласта (сплошная линия) отклоняется от теоретического значения (черная пунктирная линия). Результаты формирования изображений с использованием способа многосекторной коррекции данных согласно настоящему варианту реализации при тех же экспериментальных условиях показаны на Фиг. 5(b). Результаты показывают, что при включении в инструмент получения гамма-изображений алгоритма вращающегося сектора граница пласта, определенная по результатам получения гамма-изображений, по существу совпадает с теоретической границей пласта, полученной экспериментальным устройством.
Дополнительное сравнение двух вышеуказанных результатов получения гамма-изображений показано на Фиг. 6. Как видно из черной области изображения, обозначенной посередине стрелкой, между изображениями, созданными двумя способами, есть очевидные различия. Высокорадиоактивная область левого изображения без использования способа по настоящему варианту реализации меньше, чем у правого изображения, что указывает на то, что левое изображение свидетельствует о меньшей чувствительности к изменению гамма-излучения в пласте и более медленной реакции.
Второй вариант реализации
Фиг. 4 схематически иллюстрирует функциональную концепцию системы многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, в соответствии с вариантом реализации настоящего изобретения. Конструкция и функция системы коррекции описаны ниже со ссылкой на Фиг. 4.
Как показано на Фиг. 4, система многосекторной коррекции данных содержит модуль 41 разделения зон подсчета, модуль 42 регистрации импульсов, модуль 43 построения векторов измерений, модуль 44 построения матрицы коррекции и модуль 45 вычисления интенсивности гамма-излучения. Модуль 41 разделения зон подсчета используется для разделения каждого сектора гамма-изображения на множество зон подсчета. Модуль 42 регистрации импульсов используется для подсчета количества действительных счетных импульсов в каждой зоне подсчета в заданный интервал времени во время MWD. Модуль 43 построения векторов измерений используется для построения множества векторов измерений на основе зарегистрированного количества в каждой зоне подсчета. Модуль 44 построения матрицы коррекции используется для построения матрицы коррекции с условным числом, меньшим заданного значения. Модуль 45 вычисления интенсивности гамма-излучения используется для вычисления интенсивности гамма-излучения для каждого сектора, в котором проводились измерения, с помощью множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных в секторе, в котором выполнялись измерения, для каждого заданного интервала времени.
Модуль 41 разделения зон подсчета, модуль 42 регистрации импульсов, модуль 43 построения векторов измерений, модуль 44 построения матрицы коррекции и модуль 45 вычисления интенсивности гамма-излучения согласно настоящему варианту реализации могут выполнять соответствующие этапы, т. е. этапы S110~S150 способа по первому варианту реализации соответственно с разумными конфигурациями. Поэтому детали этих модулей в данном документе не обсуждаются.
Следует понимать, что варианты реализации настоящего изобретения не ограничиваются описанными здесь этапами обработки, а должны распространяться на эквивалентные замены этих признаков, понятные специалистам в данной области техники с обычным уровнем подготовки. Также следует понимать, что используемая здесь терминология предназначена только для целей описания конкретного варианта реализации, а не для ограничения.
Выражение «вариант реализации» или «варианты реализации», употребляемое в описании, означает, что конкретные признаки, структуры или характеристики, описанные в связи с вариантом реализации или вариантами реализации, включены по меньшей мере в один вариант реализации настоящего изобретения. Таким образом, термины «вариант реализации» или «варианты реализации», используемые в описании, не обязательно относятся к одному и тому же варианту реализации.
Хотя варианты реализации настоящего изобретения описаны выше, описание предоставлено для облегчения понимания метода реализации настоящего изобретения, а не для ограничения настоящего изобретения. Не выходя за рамки сущности и объема настоящего изобретения, специалист в данной области техники может внести различные модификации и улучшения в формы и детали метода реализации. Таким образом, объем охраны настоящего изобретения определяется прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ заканчивания с применением хвостовика и расширительное подвесное устройство для его осуществления | 2020 |
|
RU2814481C2 |
| СПОСОБ И УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ РЕЗЕРВУАРА, ОСНОВАННЫЕ НА ОГРАНИЧЕНИИ ГЕОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК, И СРЕДА ХРАНЕНИЯ ДАННЫХ | 2021 |
|
RU2836749C1 |
| ФОСФОРСОДЕРЖАЩЕЕ МОЛЕКУЛЯРНОЕ СИТО, ЕГО ПОЛУЧЕНИЕ И ПРИМЕНЕНИЕ | 2018 |
|
RU2782564C2 |
| КАТАЛИЗАТОР НА НОСИТЕЛЕ, СПОСОБ ЕГО ПОЛУЧЕНИЯ И ЕГО ПРИМЕНЕНИЕ | 2020 |
|
RU2815645C1 |
| СПОСОБ, РЕАКТОР И СИСТЕМА ДЛЯ КАТАЛИТИЧЕСКОГО КРЕКИНГА ЖИДКИХ НЕФТЕПРОДУКТОВ | 2019 |
|
RU2793541C2 |
| СПОСОБ И СИСТЕМА ДЛЯ КАТАЛИТИЧЕСКОГО КРЕКИНГА ЖИДКИХ НЕФТЕПРОДУКТОВ | 2019 |
|
RU2797245C2 |
| СПОСОБ И ОБОРУДОВАНИЕ РАСПОЗНАВАНИЯ ЭМОЦИЙ В РЕЧИ | 2019 |
|
RU2720359C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ЦЕНТРА ЗАЛЕЖИ В КАРСТОВОЙ ПЕЩЕРЕ | 2017 |
|
RU2760102C2 |
| ГРАФЕНОВЫЙ ПОРОШОК, СПОСОБ ЕГО ПОЛУЧЕНИЯ И ЕГО ПРИМЕНЕНИЕ | 2021 |
|
RU2829790C2 |
| КАТАЛИЗАТОР КАТАЛИТИЧЕСКОГО КРЕКИНГА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2020 |
|
RU2803535C2 |
Группа изобретений относится к области геонавигации при разведке нефти и газа. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, включает следующие этапы: разделение каждого сектора гамма-изображения на множество зон подсчета; подсчет количества действительных счетных импульсов для каждой зоны подсчета в заданный интервал времени во время измерения в процессе бурения; построение множества векторов измерений, характеризующих результаты измерений во всех секторах на основе значения зарегистрированного количества для каждой зоны подсчета; построение матрицы коррекции с условным числом меньше заданного значения, при этом указанная матрица коррекции используется для коррекции данных измерений; вычисление интенсивности гамма-излучения для каждого сектора, в котором проводились измерения, с помощью множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных измерений каждого сектора, в котором проводились измерения, для каждого заданного интервала времени. Технический результат – повышение точности гамма-изображений. 3 н. и 12 з.п. ф-лы, 6 ил.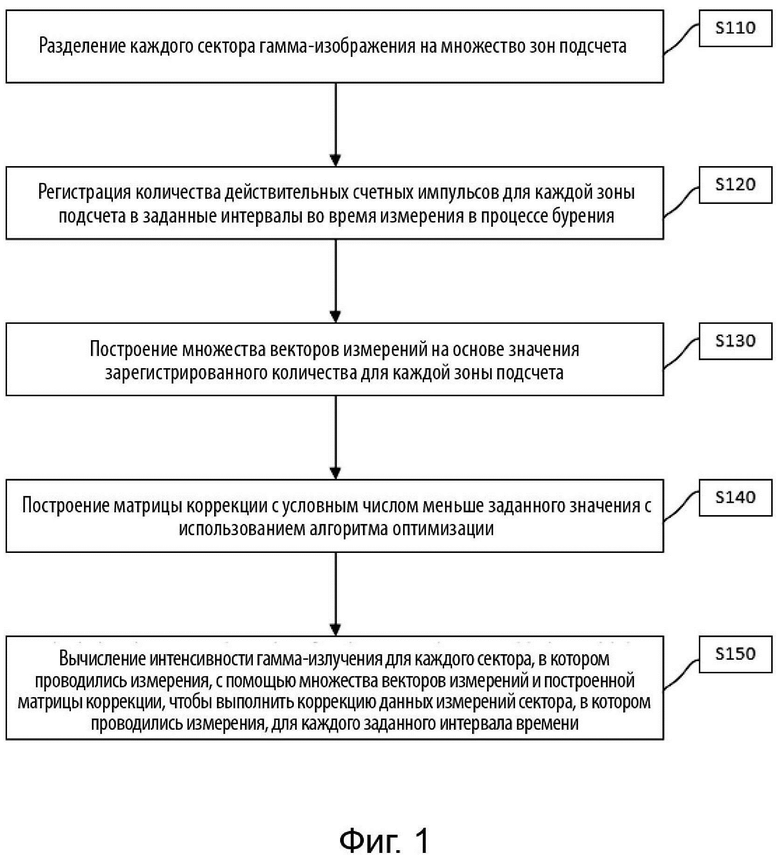
1. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, характеризующийся тем, что включает следующие этапы:
(a) разделение каждого сектора гамма-изображения на множество зон подсчета;
(b) подсчет количества действительных счетных импульсов для каждой зоны подсчета в заданный интервал времени во время измерения в процессе бурения;
(c) построение множества векторов измерений, характеризующих результаты измерений во всех секторах на основе значения зарегистрированного количества для каждой зоны подсчета;
(d) построение матрицы коррекции с условным числом меньше заданного значения, при этом указанная матрица коррекции используется для коррекции данных измерений; и
(e) вычисление интенсивности гамма-излучения для каждого сектора, в котором проводились измерения, с помощью множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных измерений каждого сектора, в котором проводились измерения, для каждого заданного интервала времени.
2. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 1, отличающийся тем, что на указанном этапе (с) все зоны подсчета делятся на множество групп и значение зарегистрированного количества для каждой зоны подсчета в каждой группе используется для построения соответствующего вектора измерений,
при этом количество групп, на которые разделены зоны подсчета, равно количеству зон подсчета, образованных делением каждого сектора на равные части, и каждая группа зон подсчета состоит из зон подсчета, дискретно (т. е. ненепрерывно) выделяемых из каждого сектора, причем никакие смежные зоны подсчета в одном и том же секторе не входят в одну и ту же группу.
3. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 1 или 2, отличающийся тем, что на указанном этапе (е) интенсивность G гамма-излучения для каждого сектора, в котором проводились измерения, вычисляют по формуле
 ,
,
где Mn обозначает n-й вектор измерений, γ - матрица коррекции,  , а γn обозначает n-ю матрицу оптимизации.
, а γn обозначает n-ю матрицу оптимизации.
4. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 3, отличающийся тем, что на указанном этапе (с) все зоны подсчета делятся на две группы и первый вектор измерений и второй вектор измерений строятся в соответствии со значением зарегистрированного количества в единицу времени для каждой зоны подсчета в каждой группе, при этом каждая группа зон подсчета образована путем дискретного выделения зон подсчета из последовательных зон подсчета, расположенных в направлении по окружности, причем никакие смежные зоны подсчета не входят в одну и ту же группу;
при этом указанный первый вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета в первой группе зон подсчета, причем эти значения расположены в последовательности, соответствующей зонам подсчета в направлении по окружности; и
указанный второй вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета во второй группе зон подсчета, причем эти значения располагаются таким же образом, как и в первом векторе измерений и с той же начальной точкой.
5. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 4, отличающийся тем, что этап построения указанной матрицы коррекции включает:
определение количества единиц в матрице коррекции на основе количества групп всех зон подсчета;
задание коэффициента коррекции и множества коэффициентов коррекции, при этом количество коэффициентов коррекции равно сумме количества элементов первого вектора измерений и второго вектора измерений;
построение на основе коэффициента коррекции и множества коэффициентов коррекции матрицы единиц коррекции для каждого вектора измерений, тем самым формируя матрицу коррекции; и
определение на основе вектора, составленного из указанного множества коэффициентов коррекции в качестве независимой переменной, посредством алгоритма оптимизации оптимальной независимой переменной, для которой условное число матрицы коррекции достигает или приближается к глобальному минимуму, тем самым получая оптимальную матрицу коррекции с оптимальной независимой переменной.
6. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 5, отличающийся тем, что на указанном этапе (d) строят матрицу γ коррекции с условным числом менее 10 согласно формуле
 ,
,
где γ1 выражается следующим образом:
 ,
,
а γ2 выражается следующим образом:
 ,
,
где n обозначает количество секторов, в которых проводятся измерения,  - коэффициент коррекции, а
- коэффициент коррекции, а  - вектор коэффициентов коррекции.
- вектор коэффициентов коррекции.
7. Способ многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 6, отличающийся тем, что на указанном этапе (е) интенсивность G гамма-излучения для каждого сектора, в котором проводились измерения, вычисляют по формуле
 ,
,
где М1 и M2 обозначают первый и второй векторы измерений соответственно, а γ обозначает матрицу коррекции после оптимизации.
8. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, характеризующаяся тем, что содержит:
модуль разделения зон подсчета, выполненный с возможностью разделения каждого сектора гамма-изображения на множество зон подсчета;
модуль регистрации импульсов, выполненный с возможностью подсчета количества действительных счетных импульсов для каждой зоны подсчета в заданный интервал времени во время измерения в процессе бурения;
модуль построения векторов измерений, выполненный с возможностью построения множества векторов измерений, характеризующих результаты измерений во всех секторах на основе значения зарегистрированного количества для каждой зоны подсчета;
модуль построения матрицы коррекции, выполненный с возможностью построения матрицы коррекции с условным числом, меньшим заданного значения, с использованием алгоритма оптимизации, при этом указанная матрица коррекции используется для коррекции данных измерений; и
модуль вычисления интенсивности гамма-излучения, выполненный с возможностью вычисления интенсивности гамма-излучения для каждого сектора, в котором проводились измерения, с помощью множества векторов измерений и построенной матрицы коррекции, чтобы выполнить коррекцию данных измерений сектора, в котором проводились измерения, для каждого заданного интервала времени.
9. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 8, отличающаяся тем, что модуль построения векторов измерений выполнен с возможностью разделения всех зон подсчета на множество групп и построения соответствующего вектора измерений со значением зарегистрированного количества для каждой зоны подсчета в каждой группе,
при этом количество групп, на которые разделены зоны подсчета, равно количеству зон подсчета, образованных делением каждого сектора на равные части, и каждая группа зон подсчета состоит из зон подсчета, дискретно (т. е. ненепрерывно) выделяемых из каждого сектора, причем никакие смежные зоны подсчета в одном и том же секторе не входят в одну и ту же группу.
10. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 8 или 9, отличающаяся тем, что модуль вычисления интенсивности гамма-излучения выполнен с возможностью вычисления интенсивности G гамма-излучения для каждого сектора, в котором проводились измерения, следующим образом:
,
где Mn обозначает n-й вектор измерений, γ - матрица коррекции, , а γn обозначает n-ю матрицу оптимизации.
11. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 10, отличающаяся тем, что
модуль построения векторов измерений выполнен с возможностью разделения всех зон подсчета на две группы и построения первого вектора измерений и второго вектора измерений в соответствии со значением зарегистрированного количества в единицу времени для каждой зоны подсчета в каждой группе, при этом каждая группа зон подсчета образована путем дискретного выделения зон подсчета из последовательных зон подсчета, расположенных в направлении по окружности, причем никакие смежные зоны подсчета не входят в одну и ту же группу;
при этом указанный первый вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета в первой группе зон подсчета, причем эти значения расположены в последовательности, соответствующей зонам подсчета в направлении по окружности; и
указанный второй вектор измерений является одномерным вектором, каждая векторная единица которого является значением зарегистрированного количества в единицу времени для каждой зоны подсчета во второй группе зон подсчета, причем эти значения располагаются таким же образом, как и в первом векторе измерений и с той же начальной точкой.
12. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 11, отличающаяся тем, что модуль построения матрицы коррекции выполнен с возможностью:
определения количества единиц в пределах матрицы коррекции на основе количества групп всех зон подсчета;
задания коэффициента коррекции и множества коэффициентов коррекции;
построения на основе коэффициента коррекции и множества коэффициентов коррекции матрицы единиц коррекции для каждого вектора измерений, тем самым формируя матрицу коррекции; и
определения на основе вектора, составленного из указанного множества коэффициентов коррекции в качестве независимой переменной, посредством алгоритма оптимизации оптимальной независимой переменной, для которой условное число матрицы коррекции достигает или приближается к глобальному минимуму, тем самым получая оптимальную матрицу коррекции с оптимальной независимой переменной,
при этом количество коэффициентов коррекции равно сумме количества элементов первого вектора измерений и второго вектора измерений.
13. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 12, отличающаяся тем, что модуль построения матрицы коррекции выполнен с возможностью построения матрицы γ коррекции с условным числом менее 10 следующим образом:
,
где γ1 выражается следующим образом:
,
а γ2 выражается следующим образом:
,
где n обозначает количество секторов, в которых проводятся измерения, - коэффициент коррекции, а - вектор коэффициентов коррекции.
14. Система многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по п. 13, отличающаяся тем, что модуль вычисления интенсивности гамма-излучения выполнен с возможностью вычисления интенсивности G гамма-излучения для каждого сектора, в котором проводились измерения, следующим образом:
,
где М1 и M2 обозначают первый и второй векторы измерений соответственно, а γ обозначает матрицу коррекции.
15. Компьютерное устройство для реализации способа многосекторной коррекции данных гамма-изображений, содержащее процессор и память, причем указанная память содержит по меньшей мере одну инструкцию, по меньшей мере одну программу, набор кодов или набор инструкций, при этом указанная по меньшей мере одна инструкция, по меньшей мере одна программа, указанный набор кодов или указанный набор инструкций загружается и выполняется указанным процессором для реализации способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по любому из пп. 1-7.
16. Машиночитаемый носитель данных, на котором хранится по меньшей мере одна инструкция, по меньшей мере одна программа, набор кодов или набор инструкций, при этом указанная по меньшей мере одна инструкция, по меньшей мере одна программа, указанный набор кодов или указанный набор инструкций загружается и исполняется указанным процессором для реализации способа многосекторной коррекции данных гамма-изображений, получаемых в процессе бурения, по любому из пп. 1-7.
| CN 105545284 A, 04.05.2016 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| CN 108625845 A, 09.10.2018 | |||
| ОБНАРУЖЕНИЕ ПОЛОЖЕНИЯ ГРАНИЦ МНОГОЧИСЛЕННЫХ ПОДЗЕМНЫХ СЛОЕВ | 2013 |
|
RU2596080C2 |

