Изобретение относится к машиностроению, а именно к платформенным манипуляционным механизмам параллельной структуры с несколькими степенями свободы (W≥2), и может найти применение на удаленных от земли космических станциях и других беспилотных летательных объектах, а также в обрабатывающих или сборочных центрах и автоматических линиях для обеспечения их безаварийной работы и повышения их работоспособности без участия человека.
Известен многоопорный платформенный робот в виде платформы Стюарта, имеющей W=6 степеней свободы и соединенной с основанием через равное W=6 число С=W=6 составных приводных опор, содержащих 12 сложных сферических шарниров со сложным приводом одновременно от 6-ти установленных на приводных опорах линейных двигателей (книга Смелягин А.И. «Структура машин, механизмов и конструкций» - Москва.: ИНФРА-М, 2019 - стр. 153, рис. 2.73) - аналог.
Недостатками известного робота в виде платформы Стюарта являются сложность конструкции и системы управления сразу 6-ю приводными двигателями из-за связанной кинематики их движений и полная неработоспособность управления платформой в данном приводе (где С=W) при выходе из строя хотя бы одного из шести приводных двигателей.
Наиболее близким аналогом по технической сущности и достигаемому эффекту к предлагаемому изобретению является многоопорный платформенный робот, содержащий основание с тремя составными приводными опорами (С=З), каждая из которых выполнена с двойным вращательным и зубчато-ползунным приводом подвижной платформы, имеющей W=6 степеней свободы для образования привода робота, в котором число составным приводных опор (С=З) выполнено меньшим, чем число степеней свободы подвижной платформы (W=6, т.е. С<W) (Книга «New Advances in Mechanisms, Mechanical Transmissions and Robotics. MTM&Robotics 2020», серия «Mechanisms and Machine Science»: Springer AG, 2021, p. 250, Fig. 1/http://www.springer.com/series/8779) - прототип.
Недостатками указанного прототипа являются:
1) Сложность конструкции вращательно-поступательного-зубчатого привода каждой из составных приводных опор платформы.
2) Ограниченное рабочее пространство из-за возникающих мертвых и неуправляемых двигателями особых положений платформы.
3) Сложная система управления одновременно всеми 6-ю приводными двигателями из-за связанной кинематики их движений.
4) Полная неработоспособность платформенного робота с С=W при выходе из строя хотя бы одного из шести приводных двигателей не позволяет обеспечить безаварийность работы робота в автономных условиях его эксплуатации (например, в космосе).
5) Малое перемещение подвижной платформы по вертикали ограничено небольшим ходом линейных приводных двигателей.
В основу изобретения положена техническая задача, заключающаяся:
1) В упрощении конструкции и системы управления (за счет уменьшения числа одновременно работающих приводных двигателей).
2) В увеличении рабочего пространства робота (за счет возможности автоматического перехода через возникающие мертвые и неуправляемые особые положения).
3) Автоматическое обеспечение работоспособности и безаварийности функционирования робота при выходе из строя отдельных приводных двигателей.
4) Возможности подъема робота с подвижной платформой на неограниченную высоту (за счет запуска тяговых винтов).
Получение технического результата достигается за счет того, что в многоопорном платформенном роботе, содержащем кинематически соединенные между собой посредством составных приводных опор основание и подвижную платформу, число «С» составных приводных опор выполнено превышающим число «W» степеней свободы подвижной платформы по условию С>W и каждая из упомянутых составных приводных опор выполнена в виде установленного на основании поворотного кривошипа с приводом от отдельного вращательного двигателя, а каждый из упомянутых поворотных кривошипов соединен с подвижной платформенной посредством шатуна с двумя цилиндрическими шарнирами, выполненными с параллельными между собой осями вращения.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3. фиг. 4, фиг. 5, фиг. 6 и фиг. 7.
На фиг. 1 изображен общий вид безаварийного многоопорного платформенного робота, содержащего основание 1 и подвижную платформу 2 с рабочими органами, которые кинематически соединены между собой посредством составных приводных опор. Каждая из упомянутых составных приводных опор выполнена в виде установленного на основании 1 поворотного кривошипа 3 с приводом от отдельного вращательного двигателя, а каждый из упомянутых поворотных кривошипов 3 соединен с подвижной платформой 2 посредством шатуна 4 с двумя цилиндрическими шарнирами, например, А и В, выполненными с параллельными между собой осями вращения. В общем случае число «С» составных приводных опор при разных вариантах выполнения подвижной платформы 2 должно быть превышающим число «W» степеней свободы подвижной платформы 2 (С>W)
В конкретном варианте выполнения робота на фиг. 1 подвижная платформа 2 выполнена в виде шарнирного четырехугольника BCDE с установкой на его сторонах BC,CD,DE и ЕВ четырех рабочих органов 5, 6, 7 и 8, выполненных, например, в виде поворотных схватов с возможностью их складывания внутрь подвижной платформы в нерабочем положении. В данном варианте подвижная платформа 2 соединена с основанием 1 через четыре составных приводных опоры O1AB, O2KE, O3LD и O4MC (то есть С=4), любые три из которых (например, О1АВ, O2KE, O3LD выделенные жирной линией) соединены с отдельными основными приводными вращательными двигателями - для образования платформенного робота с тремя управляемыми степенями свободы подвижной платформы 2 (W=3) и выполнения необходимого условия:

В варианте робота на фиг. 1 четвертая составная приводная опора O4MC соединена с дополнительным аварийным приводным вращательным приводным двигателем, автоматически включаемым только для прохождения возникающих мертвых или неуправляемых особых положений, а также для автоматического сохранения работоспособности платформенного робота при выходе из строя одного из трех (любого) основных приводных двигателей. При сборке каждой из составных приводных опор с основанием 1 и подвижной платформой 2, входящей в эти сборки поворотные кривошипы 3 установлены перпендикулярно к соединяющим их шатунам 4.
На фиг. 2 представлен вариант выполнения платформенного робота, в котором кривошипы 3 и шатуны 4 составных приводных опор выполнены в виде гибко-упругих пластин с параллельно отогнутыми в одну сторону концами с расположенными на этих концах отверстиями для установки в них осей цилиндрических гарниров.
На фиг. 3 представлен вариант выполнения платформенного робота, в котором подвижная платформа 2 выполнена в виде шарнирного пятиугольника BCDEF, в сборке которого подвижная платформа 2 соединена с основанием 1 через пять составных приводных опор O1AB, O2KF, O3LD, а также и O4MC и O5PE (т.е. C=5), три из которых (например, опоры O1AB, O2KF, O3LD, выделенные жирной линией) соединены с отдельными основными приводными вращательными двигателями для образования платформенными робота с тремя управляемыми степенями свободы подвижной платформы 2 (то есть W=3) и выполнения необходимого условия:

В варианте робота на фиг. 3 две другие составные приводные опоры O4MC и O5PE соединены с дополнительными аварийными приводными вращательными двигателями, автоматически включаемыми только для прохождения возникающих мертвых или неуправляемых особых положений, а также для автоматического сохранения работоспособности платформенного робота при выходе из строя одного или двух (любых) основных приводных двигателей.
На фиг. 4 представлен вариант выполнения платформенного робота, в котором подвижная платформа 2 выполнена в виде шарнирного шести угольника BCDEFG, в сборке которого подвижная платформа 2 соединена с основанием 1 через шесть составных приводных опор OrAB, O2QF, O3HD, а также O4ME, O5PC и O6KG (т.е. С=6), три из которых (например, опоры О1АВ, O2QF и O3HD, выделенные жирной линией) соединены с отдельными основными приводными вращательными двигателями для образования платформенного робота с тремя управляемыми степенями свободы подвижной платформы 2 (т.е. W=3) и выполнения необходимого условия:

В варианте робота на фиг. 4 три другие составные приводные опоры O4ME, O5PC и O6KG соединены с дополнительными аварийными приводными вращательными двигателями, автоматически включаемыми только для прохождения возникающих мертвых или неуправляемых особых положений, а также для автоматического сохранения работоспособности платформенного робота или выходе из строя одного, двух или даже всех трех основных приводных двигателей.
На фиг. 5 представлен вариант выполнения платформенного робота, в котором рабочие органы 9 и 10, установленные на сторонах подвижной платформы 2 с приводом через поворотные кривошипы 3 и шатуны 4, дополнительно кинематически связаны между собой через зубатые колеса 11 и 12 с установленной по центру подвижной платформы 2 приводной шестерней 13 вращательного двигателя 14 для синхронного поворота между собой разных рабочих органов.
На фиг. 6 представлен вариант выполнения платформенного робота, в котором рабочие органы выполнены в виде вращающихся приводных тяговых винтов 15, 16, 17, 18, 19 и 20, установленных на сторонах подвижной платформы 2 равномерно по окружности и выполненных с возможностью их одновременного привода для перемещения робота по вертикали или раздельного привода отдельных тяговых винтов для перемещения робота по горизонтали, для образования летающего платформенного робота, содержащего подвижную платформу с тремя управляемыми степенями свободы.
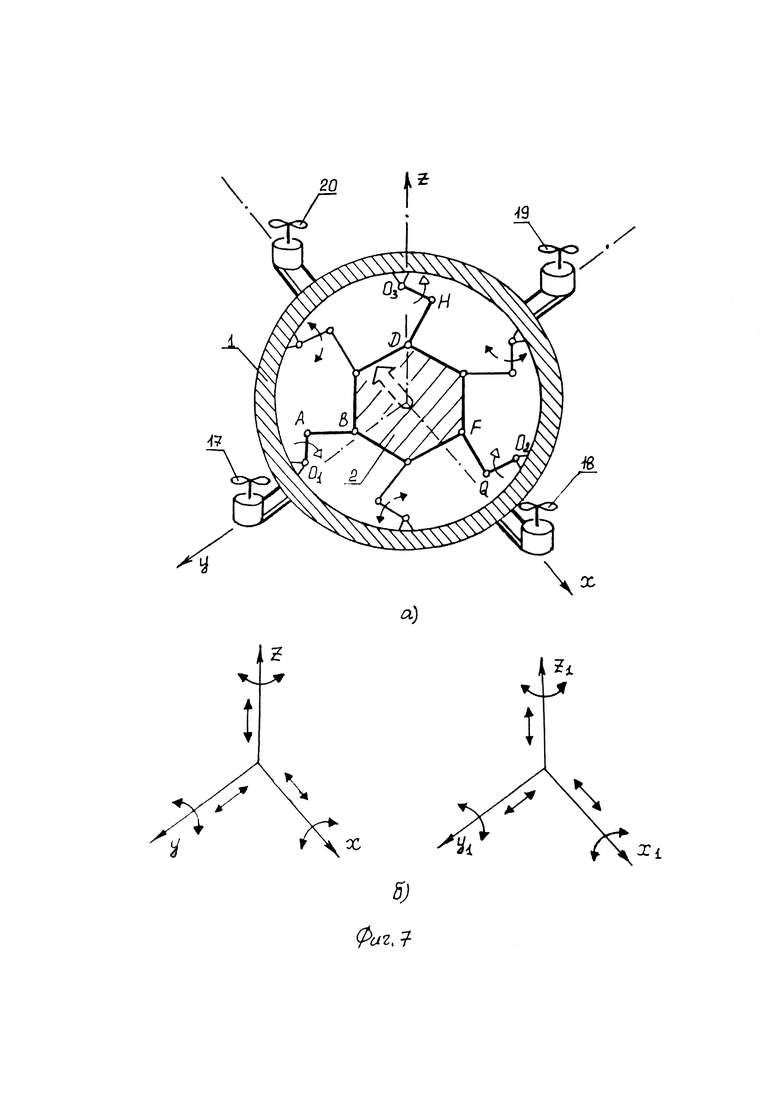
На фиг. 7 представлен вариант выполнения платформенного робота, в котором на фиг. 7 (а) основание 1 выполнено в виде круглого кольца и снабжено установленными по окружности тяговыми винтами 17, 18, 19 и 20, выполненными с возможностью их раздельной или совместной работы для обеспечения углового поворота основания 1 вместе с подвижной платформой 2 раздельно вокруг горизонтальных осей х и у или перемещение основания 1 вместе с подвижной платформой 2 вдоль вертикальной оси z для образования безаварийного летающего платформенного робота с шестью степенями свободы подвижной платформы 2, включающими ее поступательное перемещение вдоль параллельных осей х, у, z и х1, у1, z1 или вращение вокруг параллельных осей х, y, z и x1, y1, z1.
На фиг. 7 (б) показаны реализуемые в данном платформенном роботе поступательные и вращательные движения подвижной платформы 2, возникающие в рабочем пространстве при использовании установленных на приводных составных опорах O1AB, O2QF и O3HD трех основных приводных вращательных двигателей и установленных на основании 1 летающего платформенного робота тяговых винтов 17, 18, 19 и 20.
Работа представленного многоопорного платформенного робота заключается в следующем.
Вращение поворотных кривошипов составных приводных опор с приводом от трех основных приводных вращательных двигателей приводит к раздельному перемещению подвижной платформы с рабочими органами вдоль параллельных осей (х, у, z; х1, y1, z1), а также к ее вращению вокруг параллельных осей z и z1.
При возникновении в рабочем пространстве платформенного робота мертвых и неуправляемых особых положений, а также при выходе из строя одного или всех основных приводных двигателей, в конструкции робота автоматически включаются установленные в составных основных опорах (при выполнении условия С>W) аварийные приводные вращательные двигатели, которые автоматически устраняют возникающие аварийные ситуации и тем самым сохраняют работоспособность данного робота.
Достигаемый в предлагаемом роботе технический эффект заключается в следующем:
1) Упрощении конструкции и системы управления.
2) Расширении рабочего пространства за счет возможности перехода через возникающие мертвые и неуправляемые особые положения.
3) Автоматическое обеспечение безаварийной работы робота на автономно летающих беспилотных и труднодоступных удаленных объектах.
4) Возможность вертикального подъема на неограниченную высоту в варианте «летающего платформенного робота».
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| СФЕРИЧЕСКИЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР-ТРИПОД | 2024 |
|
RU2839627C1 |

Изобретение относится к машиностроению, а именно к манипуляционным механизмам параллельной структуры с несколькими степенями свободы, и может найти применение на космических станциях, беспилотных летательных аппаратах и других труднодоступных удаленных объектах, а также в обрабатывающих или сборочных центрах и автоматических линиях для обеспечения их безаварийной работы без участия человека. Робот содержит основание и подвижную платформу с рабочими органами, кинематически соединенными между собой посредством составных приводных опор. Число составных приводных опор выполнено превышающим число степеней свободы подвижной платформы. Каждая из составных приводных опор выполнена в виде установленного на основании поворотного кривошипа с приводом от отдельного вращательного двигателя. Каждый из поворотных кривошипов соединен с подвижной платформой посредством шатуна с двумя цилиндрическими шарнирами, выполненными с параллельными между собой осями вращения. Обеспечивается упрощение конструкции и системы управления, расширение рабочего пространства и безаварийная работа на беспилотных объектах. 9 з.п. ф-лы, 7 ил.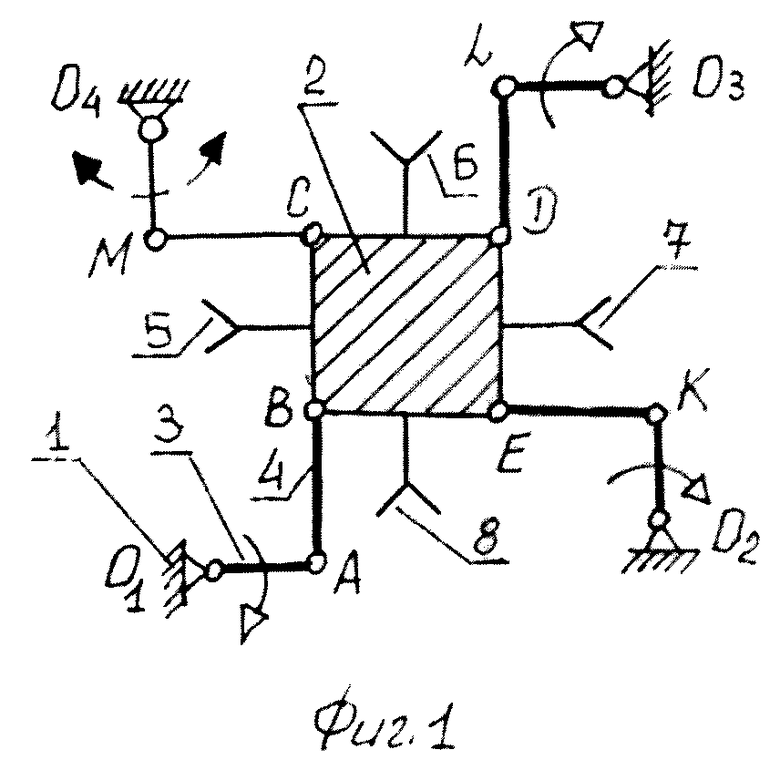
1. Многоопорный платформенный робот, содержащий основание и подвижную платформу с рабочими органами, кинематически соединенными между собой посредством составных приводных опор, отличающийся тем, что число составных приводных опор выполнено превышающим число степеней свободы подвижной платформы и каждая из упомянутых составных приводных опор выполнена в виде установленного на основании поворотного кривошипа с приводом от отдельного вращательного двигателя, а каждый из упомянутых поворотных кривошипов соединен с подвижной платформой посредством шатуна с двумя цилиндрическими шарнирами, выполненными с параллельными между собой осями вращения.
2. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена в виде шарнирного четырехугольника с установкой на его сторонах четырех рабочих органов и соединением подвижной платформы с основанием через четыре составных приводных опоры, три из которых соединены с тремя отдельными основными приводными вращательными двигателями для образования робота с тремя управляемыми степенями свободы подвижной платформы, а четвертая составная приводная опора соединена с дополнительным аварийным приводным вращательным двигателем, автоматически включаемым только для прохождения возникающих мертвых и неуправляемых положений подвижной платформы, а также для автоматического сохранения работоспособности робота при выходе из строя одного из трех основных приводных двигателей.
3. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена в виде шарнирного пятиугольника, в сборке которого подвижная платформа соединена с основанием через пять составных приводных опор, три из которых соединены с тремя отдельными основными приводными вращательными двигателями, а две другие составные приводные опоры соединены с двумя дополнительными аварийными приводными вращательными двигателями, которые автоматически включаются только в аварийной ситуации при выходе из строя основных приводных двигателей или возникновении мертвых и неуправляемых положений подвижной платформы.
4. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена в виде шарнирного шестиугольника, в сборке которого подвижная платформа соединена с основанием через шесть составных приводных опор, три из которых соединены с тремя отдельными основными приводными вращательными двигателями, а три другие составные приводные опоры соединены с тремя дополнительными аварийными приводными вращательными двигателями, которые автоматически включаются только в аварийной ситуации при выходе из строя основных приводных двигателей или возникновении мертвых и неуправляемых положений подвижной платформы.
5. Робот по п. 1, отличающийся тем, что при сборке каждой из составных приводных опор с основанием и подвижной платформой входящие в эти сборки поворотные кривошипы установлены перпендикулярно к соединяющим их шатунам.
6. Робот по п. 1, отличающийся тем, что кривошипы и шатуны составных приводных опор выполнены в виде гибко-упругих пластин с параллельно отогнутыми в одну сторону концами с выполненными на этих концах отверстиями для установки в них осей цилиндрических шарниров.
7. Робот по п. 1, отличающийся тем, что рабочие органы, установленные на сторонах подвижной платформы с приводом через поворотные кривошипы и шатуны, дополнительно кинематически связаны между собой через зубчатые колеса с установленной по центру подвижной платформы приводной шестерней двигателя синхронного поворота между собой разных рабочих органов.
8. Робот по п. 1, отличающийся тем, что рабочие органы выполнены в виде поворотных схватов с возможностью их складывания внутрь подвижной платформы в нерабочем положении.
9. Робот по п. 1, отличающийся тем, что рабочие органы выполнены в виде вращающихся приводных тяговых винтов, установленных на сторонах подвижной платформы и выполненных с возможностью их одновременного привода для перемещения робота по вертикали или раздельного привода отдельных тяговых винтов для перемещения робота по горизонтали, для образования платформенного робота, содержащего подвижную платформу с тремя управляемыми степенями свободы.
10. Робот по п. 1, отличающийся тем, что основание выполнено в виде круга или кольца, при этом рабочие органы выполнены в виде тяговых винтов, установленных равномерно по окружности и выполненных с возможностью их раздельной или совместной работы для обеспечения углового поворота основания вместе с подвижной платформой раздельно вокруг горизонтальных осей х и у или перемещения основания вместе с подвижной платформой вдоль вертикальной оси z для образования платформенного робота с шестью степенями свободы подвижной платформы, включающими поступательное перемещение вдоль параллельных осей x, y, z и x1, y1, z1 или вращение вокруг параллельных осей х, у, z и x1, y1, z1.
| New Advances in Mechanisms, Mechanical Transmissions and Robotics | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Катодное реле | 1921 |
|
SU250A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| Выпрямительное устройство | 1929 |
|
SU20222A1 |

