Изобретение относится к навигационной технике и представляет собой навигационную аппаратуру, а именно бесплатформенную аппаратуру счисления координат (БАСК) наземного транспортного средства (ТС) по параметрам его движения.
Известна бесплатформенная инерциальная навигационная система (БИНС) (В.В. Матвеев и В.Я. Распопов. Основы построения бесплатформенных инерциальных навигационных систем, Спб.: 2009 г. ГНЦ РФ ОАО "Концерн "ЦНИ "Электроприбор" стр. 120-127), применяемая на летательных аппаратах и подводных судах. Эта БИНС в качестве параметров движения ТС использует ускорение ТС и его направление в геодезической системе координат (ГСК), определяемое через углы поворотов системы координат ТС α, β, γ вокруг ее осей X, Y, Z, называемые углами Эйлера Крылова (УЭК).
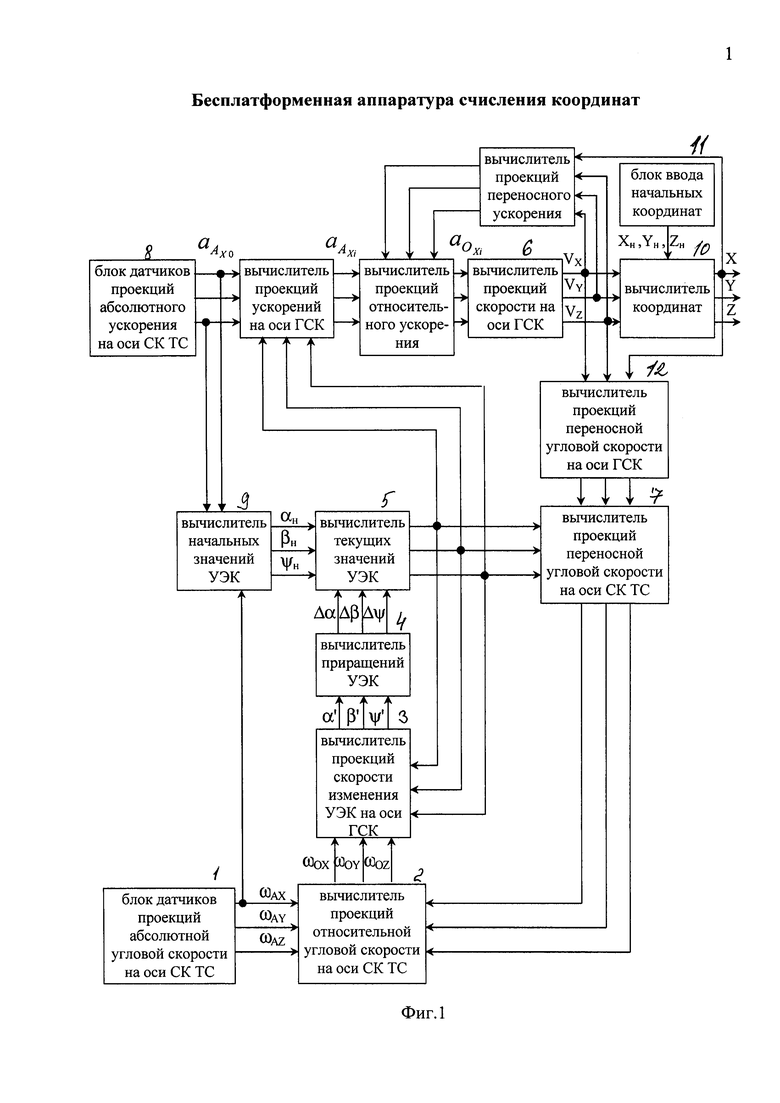
Данная БИНС (фиг. 1), взятая за прототип, включает в свой состав блок датчиков проекций абсолютной угловой скорости 1 на оси системы координат (СК) ТС, вычислитель проекций относительной угловой скорости 2 на оси СК ТС, вычислитель проекций скорости изменения 3 УЭК на оси ГСК, вычислитель приращений 4 УЭК и вычислитель текущих значений 5 УЭК, причем первый, второй и третий выходы блока датчиков проекций абсолютной угловой скорости 1 на оси СК ТС соответственно соединены с первым, вторым и третьим входами вычислителя проекции относительной угловой скорости 2 на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя проекций скорости изменения 3 УЭК на оси ГСК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя приращений 4 УЭК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя текущих значений 5 УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости изменения 3 УЭК на оси ГСК, а также с соответствующими первыми, вторыми и третьими входами вычислителя проекций ускорений 6 на оси ГСК и вычислителя проекций переносной угловой скорости 7 на оси СК ТС; блок датчиков проекций абсолютного ускорения 8 на оси СК ТС, первый и второй выходы которого соответственно соединены с первым и вторым входами вычислителя начальных значений 9 УЭК, при этом первый выход блока датчиков проекций абсолютной угловой скорости 1 на оси СК ТС дополнительно соединен с третьим входом вычислителя начальных значений 9 УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя текущих значений 5 УЭК, вычислитель координат 10, первый вход которого соединен с выходом блока ввода начальных координат 11, а его первый, второй и третий выходы являются выходами бесплатформенной аппаратуры счисления координат, причем первый выход вычислителя координат 10 дополнительно соединен с первым входом вычислителя проекций переносной угловой скорости 12 на оси ГСК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций переносной угловой скорости 7 на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекции относительной угловой скорости 2 на оси СК ТС,
Недостатком БИНС-прототипа является наличие погрешностей, колеблющихся с периодом Шулера, что, с одной стороны, исключает бесконечный рост погрешности, но все равно оставляет ее неприемлемо большой (при Δβ=1 мр, ΔS≅6,7 км).
Изобретение направлено на увеличение точности счисления координат бесплатформенной аппаратурой счисления координат наземного транспортного средства.
Сущность изобретения заключается в том, что в бесплатформенную аппаратуру счисления координат, содержащую блок датчиков проекций абсолютной угловой скорости на оси СК ТС, вычислитель проекций относительной угловой скорости на оси СК ТС, вычислитель проекций скорости изменения УЭК на оси ГСК, вычислитель приращений УЭК и вычислитель текущих значений УЭК, причем первый, второй и третий выходы блока датчиков проекций абсолютной угловой скорости на оси СК ТС соответственно соединены с первым, вторым и третьим входами вычислителя проекции относительной угловой скорости на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя проекций скорости изменения УЭК на оси ГСК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя приращений УЭК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя текущих значений УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости изменения УЭК на оси ГСК, а также с соответствующими первыми, вторыми и третьими входами вычислителя проекций скорости на оси ГСК и вычислителя проекций переносной угловой скорости на оси СК ТС, блок датчиков проекций абсолютного ускорения на оси СК ТС, первый и второй выходы которого соответственно соединены с первым и вторым входами вычислителя начальных значений УЭК, при этом первый выход блока датчиков проекций абсолютной угловой скорости на оси СК ТС дополнительно соединен с третьим входом вычислителя начальных значений УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя текущих значений УЭК, вычислитель координат, первый вход которого соединен с выходом блока ввода начальных координат, а его первый, второй и третий выходы являются выходами бесплатформенной аппаратуры счисления координат, причем первый выход вычислителя координат дополнительно соединен с первым входом вычислителя проекций переносной угловой скорости на оси ГСК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций переносной угловой скорости на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекции относительной угловой скорости на оси СК ТС, введен блок датчиков проекций скорости на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости на оси ГСК, первый, второй и третий выходы которого соответственно соединены со вторым, третьим и четвертым входами вычислителя координат, при этом первый и третий выходы вычислителя проекций скорости на оси ГСК соответственно соединены с третьим и вторым входами вычислителя проекций переносной угловой скорости на оси ГСК.
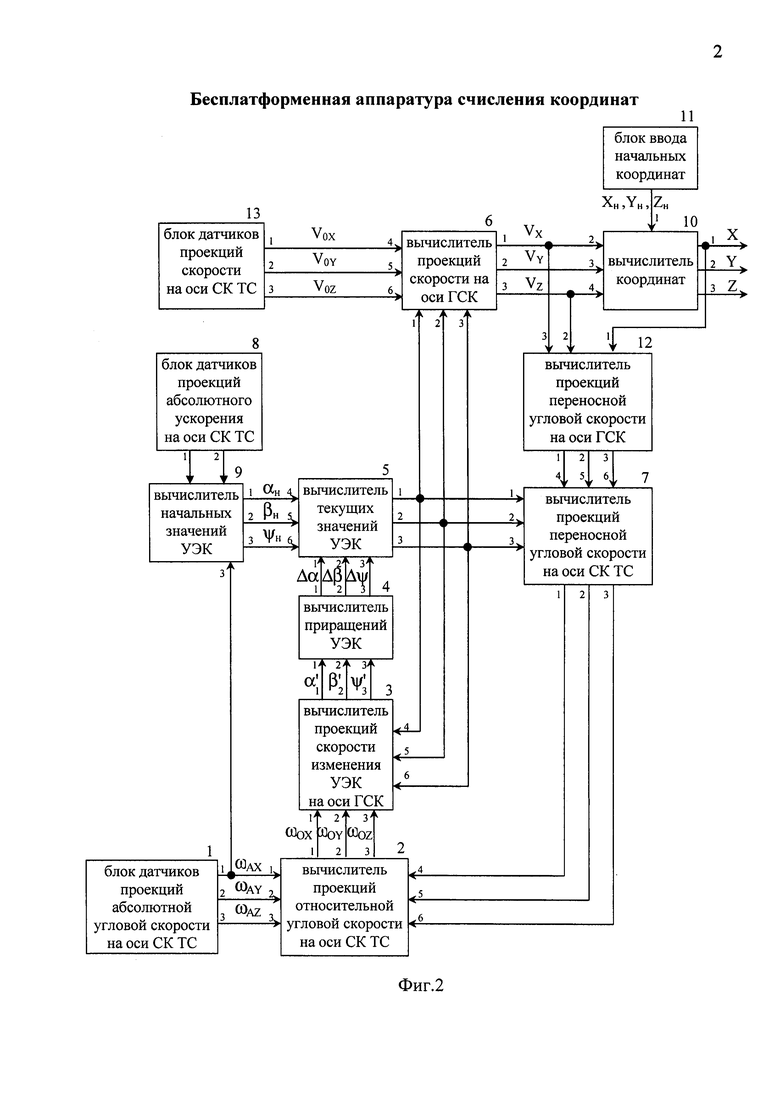
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена блок-схема БИНС-прототипа, на фиг. 2 приведена блок-схема заявляемой БАСК.
БАСК (фиг. 2) включает в свой состав блок датчиков проекций абсолютной угловой скорости 1 на оси СК ТС, вычислитель проекций относительной угловой скорости 2 на оси СК ТС, вычислитель проекций скорости изменения 3 УЭК на оси ГСК, вычислитель приращений 4 УЭК и вычислитель текущих значений 5 УЭК, причем первый, второй и третий выходы блока датчиков проекций абсолютной угловой скорости 1 на оси СК ТС соответственно соединены с первым, вторым и третьим входами вычислителя проекции относительной угловой скорости 2 на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя проекций скорости изменения 3 УЭК на оси ГСК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя приращений 4 УЭК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя текущих значений 5 УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости изменения 3 УЭК на оси ГСК, а также с соответствующими первыми, вторыми и третьими входами вычислителя проекций скорости 6 на оси ГСК и вычислителя проекций переносной угловой скорости 7 на оси СК ТС, блок датчиков проекций абсолютного ускорения 8 на оси СК ТС, первый и второй выходы которого соответственно соединены с первым и вторым входами вычислителя начальных значений 9 УЭК, при этом первый выход блока датчиков проекций абсолютной угловой скорости 1 на оси СК ТС дополнительно соединен с третьим входом вычислителя начальных значений 9 УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя текущих значений 5 УЭК, вычислитель координат 10, первый вход которого соединен с выходом блока ввода начальных координат 11, а его первый, второй и третий выходы являются выходами бесплатформенной аппаратуры счисления координат, причем первый выход вычислителя координат 10 дополнительно соединен с первым входом вычислителя проекций переносной угловой скорости 12 на оси ГСК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций переносной угловой скорости 7 на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекции относительной угловой скорости 2 на оси СК ТС, блок датчиков проекций скорости 13 на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости 6 на оси ГСК, первый, второй и третий выходы которого соответственно соединены со вторым, третьим и четвертым входами вычислителя координат 10, при этом первый и третий выходы вычислителя проекций скорости 6 на оси ГСК соответственно соединены с третьим и вторым входами вычислителя проекций переносной угловой скорости 12 на оси ГСК.
Работает БАСК следующим образом. При включении аппаратуры на стоянке сигнал V=0 запускает измерение показаний блока датчиков проекций скорости 13 на оси СК ТС, блока датчиков проекций абсолютного ускорения 8 на оси СК ТС. В этом случае датчики реагируют на ускорение свободного падения g и вертикальную составляющую угловой скорости вращения Земли ω3в, направленных по оси Y ГСК, и на горизонтальную составляющую угловой скорости вращения Земли ω3г направленную по оси X.
В соответствии с положением СК ТС, определяемым УЭК на стоянке по выходным сигналам датчиков вычислитель начальных значений 9 УЭК вычисляет αн, βн, ψн (В.В. Матвеев и В.Я. Распопов. Основы построения бесплатформенных инерциальных навигационных систем, Спб.: 2009 г. ГНЦ РФ ОАО "Концерн "ЦНИ "Электроприбор", стр. 162-164) и передает для хранения в вычислитель текущих значений 5 УЭК, в который на вторые входы при движении ТС поступают приращения Δα, Δβ, Δψ для вычисления текущих величин по формулам:



При движении блок датчиков проекций абсолютной угловой скорости 1 на оси СК ТС воспринимает скорость разворота на поверхности Земли, вращается вместе с Землей и вращается при перемещении по поверхности Земли. Поэтому, входящие в состав БАСК, вычислитель проекций переносной угловой скорости 12 на оси ГСК определяет величину переносной угловой скорости ωПХi по известным ω3, φ, R3, VX, VZ, а вычислитель проекций переносной угловой скорости 7 на оси СК ТС переводит значение ее проекций на оси СК ТС и передает полученные значения ωПХi в вычислитель проекций относительной угловой скорости 2 на оси СК ТС, где полученные значения вычитаются из показаний датчиков абсолютной угловой скорости. Полученные значения проекций относительной угловой скорости поступают в вычислитель проекций скорости изменения 3 УЭК на оси ГСК, где вычисляются α′, β′, ψ′ (В.В. Матвеев и В.Я. Распопов. Основы построения бесплатформенных инерциальных навигационных систем, Спб.: 2009 г. ГНЦ РФ ОАО "Концерн "ЦНИ "Электроприбор", стр. 162-164). Эти значения интегрируются в вычислителе приращений 4 УЭК и поступают в вычислитель текущих значений 5 УЭК для суммирования с αн, βн, ψн, образуя тем самым текущие значения УЭК. Текущие значения УЭК поступают в вычислитель проекций скорости изменения 3 УЭК на оси ГСК, вычислитель проекций скорости 6 на оси ГСК, вычислитель проекций переносной угловой скорости 7 на оси СК ТС. Т.о. проекции скорости на оси СК ТС в вычислителе проекций переносной угловой скорости 12 на оси ГСК пересчитываются в проекции скорости на оси ГСК, интегрируя которые и складывая с начальными значениями координат в вычислителе координат 10, получают текущие координаты ТС. При этом использование блока датчиков проекций скорости 13 на оси СК ТС исключает появление помех от ускорения свободного падения и появление колебаний погрешностей с периодом Шулера при сохранении всех достоинств БАСК.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Способ инерциальной навигации беспилотного летательного аппарата и устройство для его осуществления | 2020 |
|
RU2744700C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| БЕСПЛАТФОРМЕННЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ И УГЛОВЫХ СКОРОСТЕЙ | 2017 |
|
RU2656265C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
Предложенное изобретение относится к навигационной технике наземных транспортных средств, летательных аппаратов и судов. Бесплатформенная аппаратура счисления координат содержит блок датчиков проекций абсолютной угловой скорости на оси системы координат транспортного средства (СК ТС), вычислитель проекций относительной угловой скорости на оси СК ТС, вычислитель проекций скорости изменения углов Эйлера Крылова (УЭК) на оси геодезической системы координат (ГСК), вычислитель приращений УЭК и вычислитель текущих значений УЭК, блок датчиков проекций скорости на оси СК ТС, соответствующим образом соединенные между собой. Предложенное изобретение направлено на увеличение точности счисления координат и устранение погрешностей координат, колеблющихся с частотой Шулера, причем одновременно уменьшается объем вычислений. 2 ил.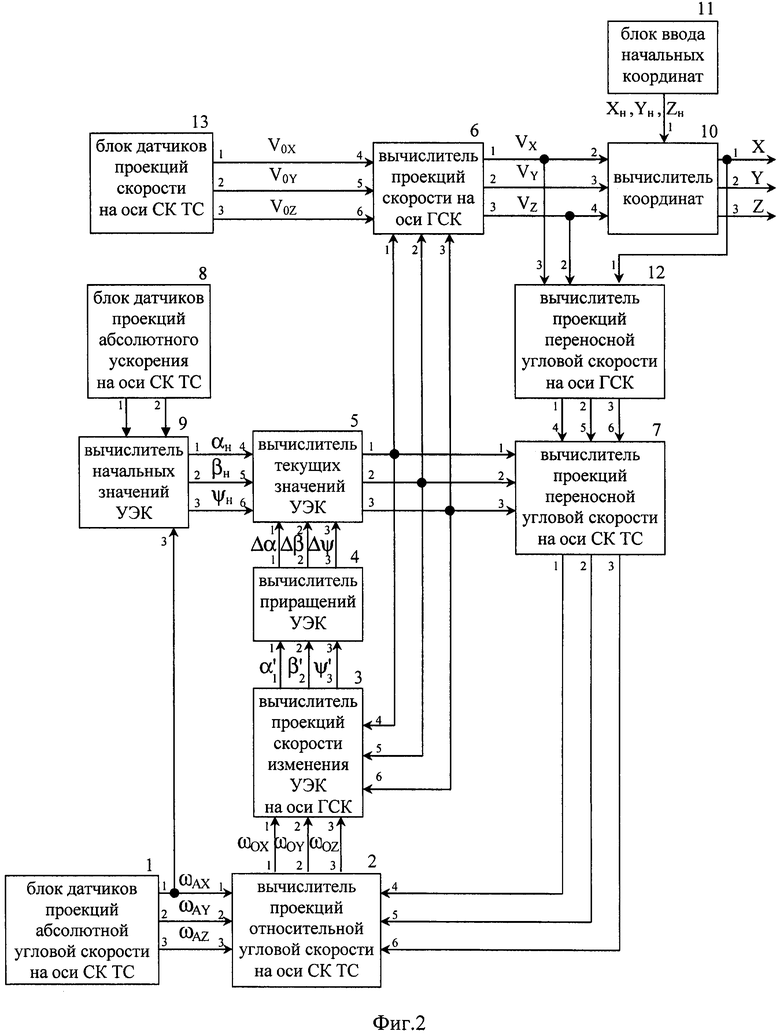
Бесплатформенная аппаратура счисления координат, содержащая блок датчиков проекций абсолютной угловой скорости на оси системы координат транспортного средства (СК ТС), вычислитель проекций относительной угловой скорости на оси СК ТС, вычислитель проекций скорости изменения углов Эйлера Крылова (УЭК) на оси геодезической системы координат (ГСК), вычислитель приращений УЭК и вычислитель текущих значений УЭК, причем первый, второй и третий выходы блока датчиков проекций абсолютной угловой скорости на оси СК ТС соответственно соединены с первым, вторым и третьим входами вычислителя проекции относительной угловой скорости на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя проекций скорости изменения УЭК на оси ГСК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя приращений УЭК, первый, второй и третий выходы которого соответственно соединены с первым, вторым и третьим входами вычислителя текущих значений УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости изменения УЭК на оси ГСК, а также с соответствующими первыми, вторыми и третьими входами вычислителя проекций скорости на оси ГСК и вычислителя проекций переносной угловой скорости на оси СК ТС, блок датчиков проекций абсолютного ускорения на оси СК ТС, первый и второй выходы которого соответственно соединены с первым и вторым входами вычислителя начальных значений УЭК, при этом первый выход блока датчиков проекций абсолютной угловой скорости на оси СК ТС дополнительно соединен с третьим входом вычислителя начальных значений УЭК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя текущих значений УЭК, вычислитель координат, первый вход которого соединен с выходом блока ввода начальных координат, а его первый, второй и третий выходы являются выходами бесплатформенной аппаратуры счисления координат, причем первый выход вычислителя координат дополнительно соединен с первым входом вычислителя проекций переносной угловой скорости на оси ГСК, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций переносной угловой скорости на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекции относительной угловой скорости на оси СК ТС, отличающаяся тем, что в нее введен блок датчиков проекций скорости на оси СК ТС, первый, второй и третий выходы которого соответственно соединены с четвертым, пятым и шестым входами вычислителя проекций скорости на оси ГСК, первый, второй и третий выходы которого соответственно соединены со вторым, третьим и четвертым входами вычислителя координат, при этом первый и третий выходы вычислителя проекций скорости на оси ГСК соответственно соединены с третьим и вторым входами вычислителя проекций переносной угловой скорости на оси ГСК.
| МАТВЕЕВ В.В., РАСПОПОВ В.Я | |||
| Основы построения бесплатформенных инерциальных навигационных систем, Спб.: 2009 г | |||
| ГНЦ РФ ОАО "Концерн "ЦНИ "Электроприбор" стр | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2309385C2 |
| СПОСОБ ЮСТИРОВКИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ОРИЕНТАЦИИ | 2014 |
|
RU2555515C1 |
| Теория, проектирование и испытания гироскопов / РИГЛИ У | |||
| и др | |||
| - М.: Мир, 1972, с | |||
| Прибор для сжигания нефти | 1921 |
|
SU369A1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507. | |||

