1
Изобретение относится к механизмам шагания мощных экскаваторов, применяемых на вскрышных работах в горнодобывающей промышленности.
Известен механизм шагания экскаватора, включающий гидроцилиндры подъема и передвижения и шарнирно соединенные лыжи, при этом каждый гидроцилиндр передвижения шарнирно связан с одной стороны с гидроцилиндром подъема, а с другой - с другим гидроцилиндром передвижения 1.
Недостатком данного технического решения является невозможность выравнивания лыж в горизонтальной плоскости.
Наиболее близким к изобретению по технической сущности и достигаемому результату является механизм шагания экскаватора, включающий шарнирно соединенные лыжи, тяговые и подъемные гидроцилиндры, шарнирно связанные с лыжами посредством опорных плит, и механизм горизонтирования лыж, выполненный из связанных между собой штанг, соединенных с лыжами 2.
Недостатком известного механизма является то, что при подъеме лыжи вначале поднимаются одним свободным концом до
упора, а затем поднимаются концы, соединенные шарниром. При опускании лыж сначала опускаются концы, соединенные шарниром, а затем свободные концы, т. е. при подъеме и опускании лыж не обеспечивается их выравнивание в горизонтальной плоскости. Это увеличивает цикл шагания или приводит к нагребанию грунта под лыжи, что значительно ухудшает условия работы.
Цель изобретения- повышение надеж10ности работы механизма.
Поставленная цель достигается тем, что в механизме шагания экскаватора, включающем щарнирно соединенные лыжи, тяговые и подъемные гидроцилиндры, шарнирно связанные с лыжами посредством опорных
15 плит, и механизм горизонтирования лыж, выполненный из связанных между собой штанг, соединенных с лыжами, концы лыж в месте их щарнирного соединения снабжены кронштейнами с размещенными в них
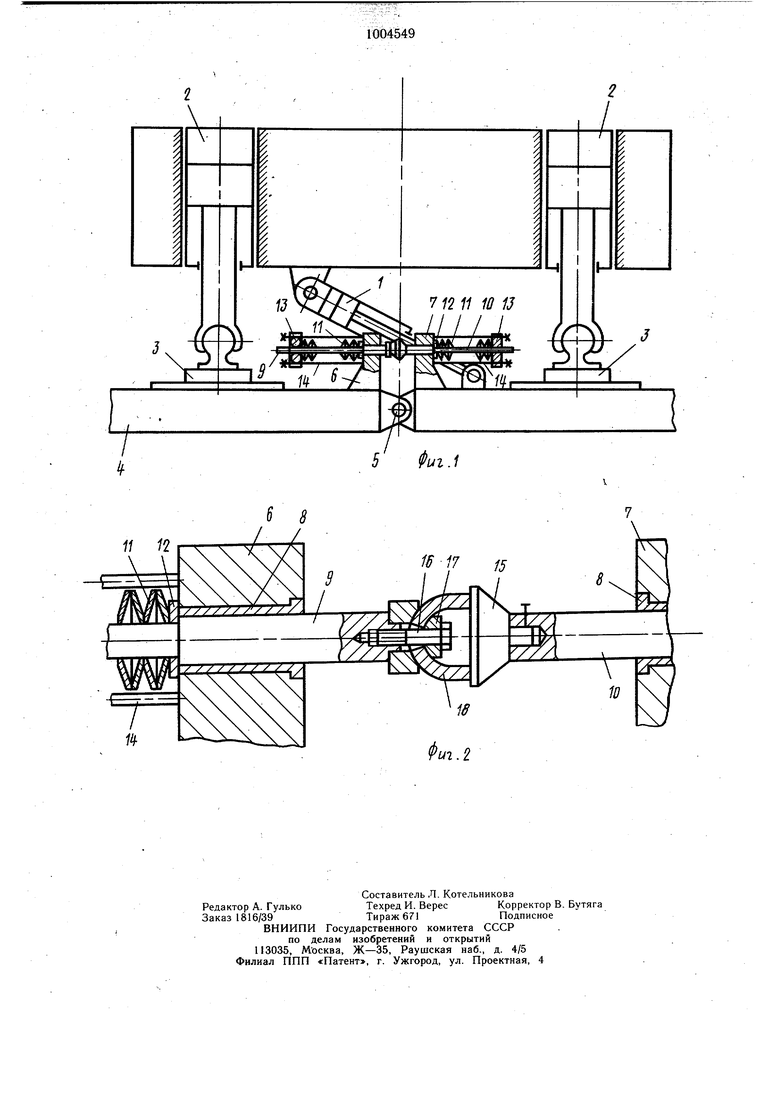
20 втулками, горизонтальные оси которых совпадают, а штанги выполнены подпружиненными и установлены с возможностью перемещения во втулках, при этом штанги связаны между собой посредством выполнения конца одной из штанг с головкой, имеющей плоскую торцовую поверхность, а конец другой штанги -со сферической шейбой, имеющей плоскую торцовую поверхность. На фиг. 1 изображен механизм шагания; общий вид; на фиг. 2 - часть выравнивающего устройства. Механизм шагания состоит из горизонтальных тяговых цилиндров 1, подъемных силовых цилиндров 2, опорных плит 3, лыж 4, попарно соединенных между собой щарниром 5. На концах лыж возле шарнира 5 установлены кронштейны 6 и 7, снабженные втулками 8. Втулки расположены на одной горизонтальной оси. Во втулках подвижно установлены штанги 9 и 10. На хвое товики щтанг одеты пакеты тарельчатых пружин 11, которые с одной стороны через шайбы 12 упираются в бурт штанги С другой стороны пакеты пружин поджимаются траверсами 13, одетыми на шпильки 14, закрепленные в кронштейнах б и 7. Таким образом, подтягивая гаички этих шпилек можно регулировать предварительную затяжку пакетов пружин. Штанга 10 заканчивается головкой 15 с плоской торцовой поверхностью, а на конце штанги 9 установлена при помощи болта 16 и сферической шайбы 17 сферическая головка 18, также имеющая плоскую торцовую поверхность затяжки болта 16 можно обеспечить подвижность головки 18. Головки 15 и 18 соприкасаются своими плоскими торцами, причем за счет предварительной затяжки пакетов тарельчатых пружин между ними создается некоторое распирающее усилие. Механизм работает следующим образом. Опускание и подъем лыж 4 осуществляется подъемными цилиндрами 2, при этом лыжи 4 стремятся повернуться таким образом, чтобы шарнир 5 был ниже свободных концов лыж. Кронштейны 6 и 7 при этом приближаются друг к другу, а штанги 9 и 10 выходят из них, сжимая пакеты пружин через шайбы 12. Усилие пружин И препятствует повороту лыж, выравнивая их в горизонтальной плоскости. Сферическая головка 18 обеспечивает центрально приложение нагрузки к штангам, предотвращая их изгиб.. Горизонтальное перемещение лыж и экскаватора осуществляется тяговыми гидроцилиндрами 1, при помощи которых опоры 3 перемещаются по лыжа 4. Лыжи, лежащие на грунте, могут свободно поворачиваться в щарнире 5, прилегая к неровной поверхности грунта, при этом торцы головок 15 и 18 либо нажимают друг на друга, либо расходятся (при повороте лыж в шарнире 5 в обратную сторону). За счет того, что штанги 9 и 10 соприкасаются друг с другом плоскими торцами головок 15 и 18, одна из которых выполнена самоустанавливающейся, неточности монтажа, а также деформации лыж во время шагания не могут оказать отрицательного влияния на процесс выравнивания лыж. что обеспечивает значительное повышение надежности механизма. Кроме того, выравнивающее устройство значительно проще известного, в нем отсутствуют шарнирные соединения, оно имеет значительно меньшие габариты и массу. Формула изобретения Механизм шагания экскаватора, включаюший шарнирно соединенные лыжи, тяговые и подъемные гидроцилиндры, шарнирно связанные с лыжами посредством опорных плит, и механизм горизонтирования лыж, выполненный из связанных между собой штанг, соединенных с лыжами, отличающийся тем, что, с целью повышения надежности работы, концы лыж в месте их шарнирного соединения снабжены кронштейнами с размещенными в них втулками, горизонтальные оси которых совпадают, а штанги выполнены подпружиненными и установлены с возможностью перемещения во втулках, при этом щтанги связаны между собой посредством выполнения конца одной из штанг с головкой, имеющей плоскую торцовую поверхность, а конец другой штанги- со сферической шайбой, имеющей плоскую торцовую поверхность. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 620556, кл. .Е 02 F 9/04, 1975. 2.Авторское свидетельство СССР № 631610, кл. Е 02 F 9/04, 1974 (прототип).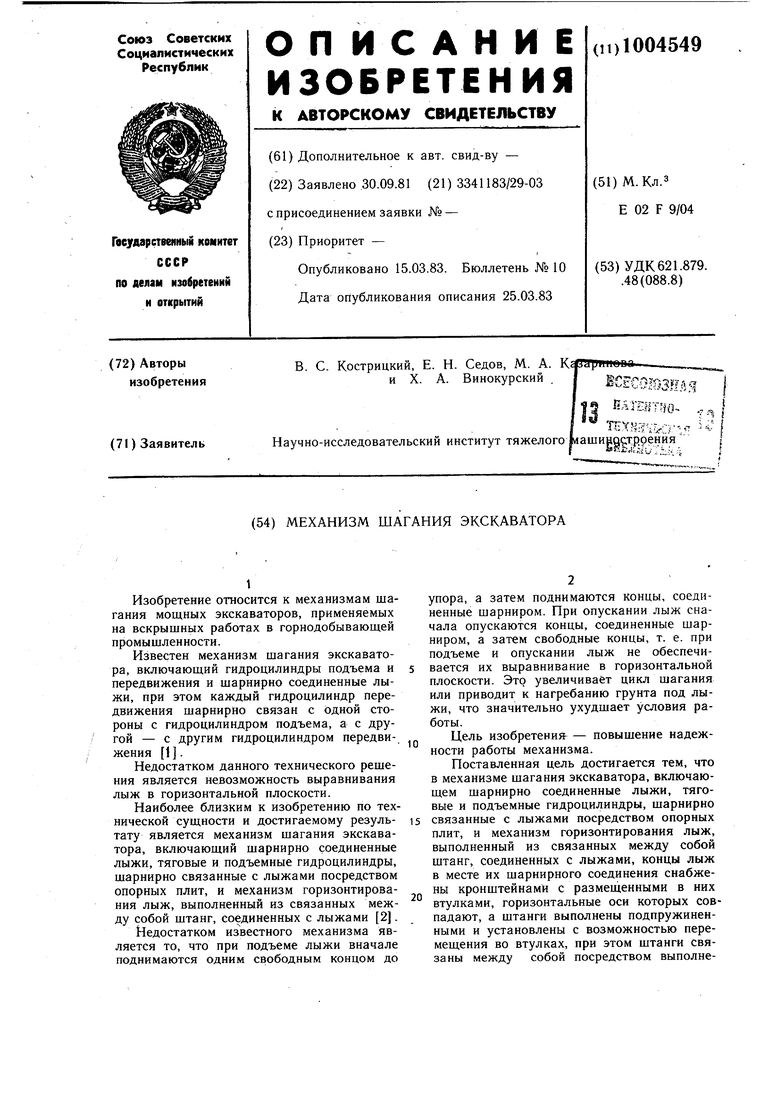
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания экскаваторов | 1974 |
|
SU631610A1 |
| Механизм шагания экскаватора | 1980 |
|
SU947307A1 |
| Опорно-ходовая часть механизма шагания | 1984 |
|
SU1183628A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ УСТРОЙСТВО | 1992 |
|
RU2019645C1 |
| Опорное устройство шагающего механизма | 1982 |
|
SU1084386A1 |
| Механизм шагания | 1986 |
|
SU1328448A1 |
| Экскаватор | 1983 |
|
SU1117384A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |