fO
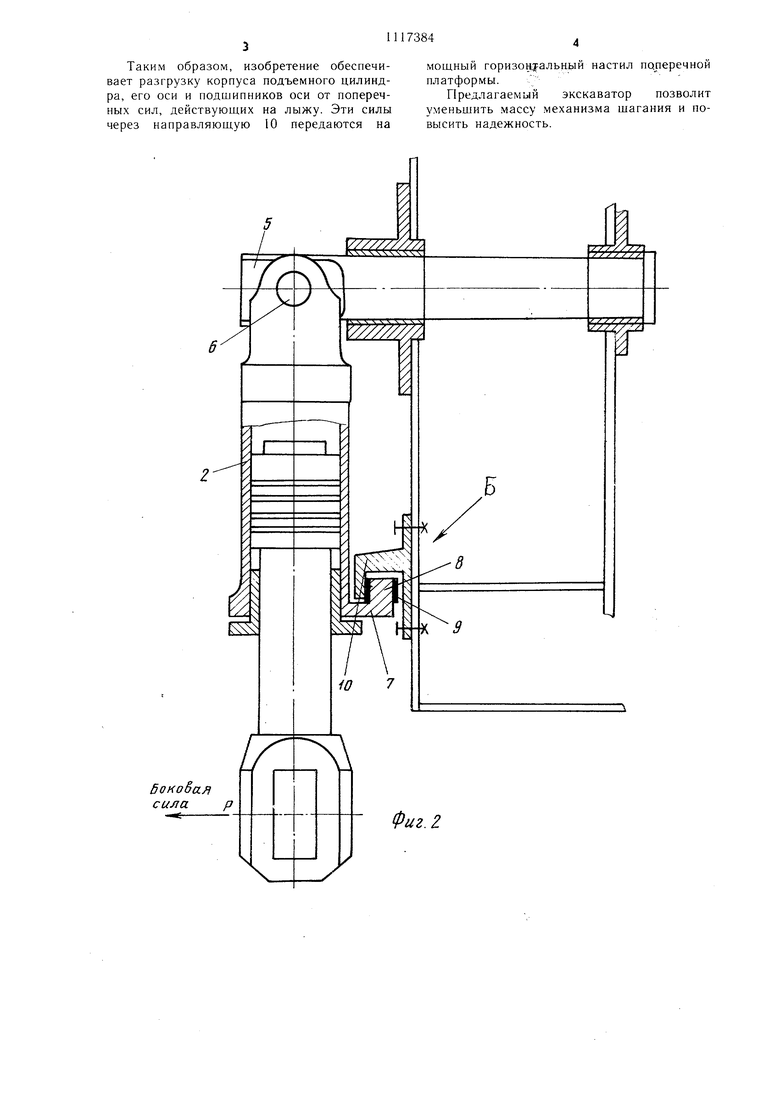
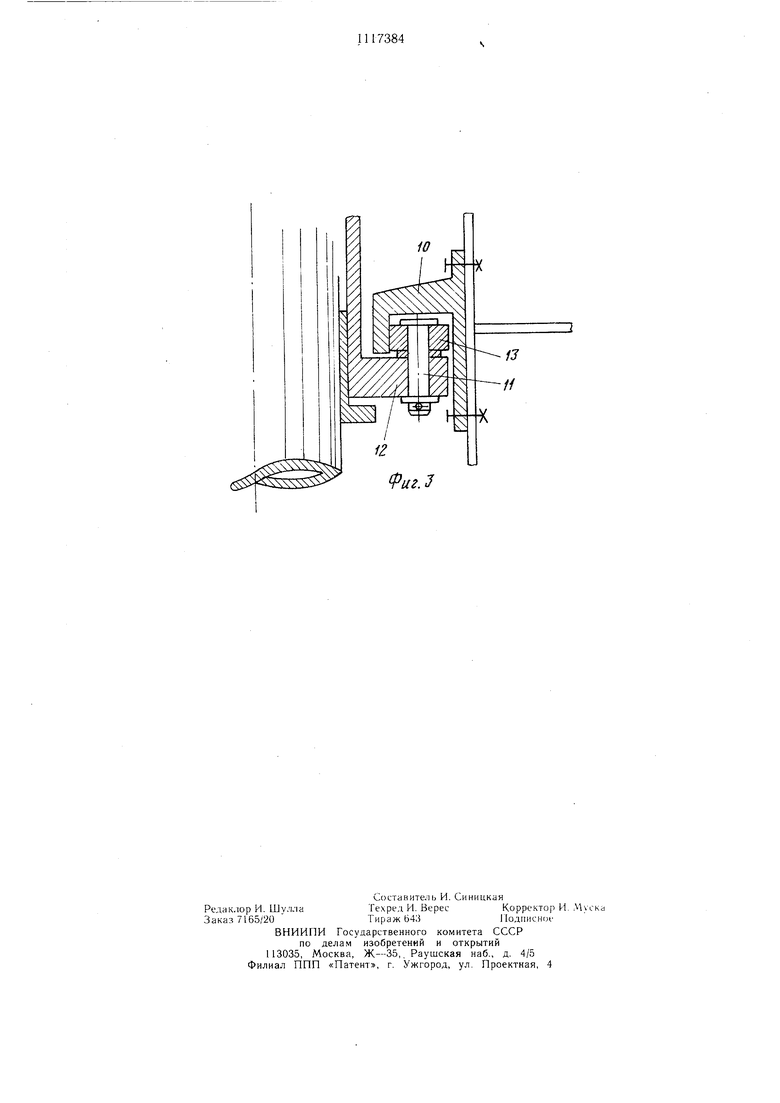
Фиг. 1 Изобретение относится к экскаваторам с механизмами шагания, применяемыми для передвижения тяжелых экскаваторов. Известен экскаватор, включающий лыжи, тяговые и подъемные цилиндры, в головки которых запрессованы оси, установленные с возможностью поворота в двух опорах корпуса 1 . Недостатком указанного механизма является то, что запрессовка и выпрессовка оси подъемного цилиндра может быть произведена только в заводских условиях и является трудоемкой и сложной операцией. Запрессовка оси вызывает дополнительное увеличение напряжений как в головке цилиндра, так и в оси. Г-образная форма узла затрудняет монтаж и демонтаж механизма, требует специальных платформ для перевозки по железной дороге. Наиболее близким к изобретению является экскаватор, имеющий лыжи, тяговые и подъемные цилиндры, подсоединенные головками щтоков к осям, закрепленным на корпусе экскаватора 2. В процессе щагания, особенно по косогору, лыжи механизма шагания нагружаются поперечными силами, достигающими довольно значительной Величины. Через шарнирное соединение лыжи с головкой щтока эти поперечные силы передаются на шток и далее на цилиндр и ось его крепления к корпусу, вызывая изгиб цилиндра и его оси. В результате приходится выбирать размеры сечений цилиндра и оси с учетом этих дополнительных изгибающих нагрузок, что приводит к нежелательному утяжелению конструкции. Целью изобретения является повышение надежности. Поставленная цель достигается тем, что в экскаваторе, имеющем лыжи, тяговые и подъемные цилиндры, подсоединенные головками щтоков к осям, закрепленным на корпусе экскаватора, последний снабжен двусторонней направляющей, а подъемные цилиндры выполнены с выступом, размещенным в двусторонней направляющей, при этом головки щтоков подъемных цилиндров соединены с осями при помощи пальцев. На фиг. 1 изображен механизм шагания, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2. Экскаватор состоит из двух лыж 1, расположенных по одной с каждой стороны машины, двух подъемных цилиндров 2 и двух тяговых цилиндров 3, закрепленных при помощи осей к корпусу 4 экскаватора. Головка подъемного цилиндра снабжена проушиной, охватывающей ось 5, и соединена с ней при помощи пальца 6, установленного 4 в поперечном отверстии оси, так что цилиндр может покачиваться в плоскости, проходящей через ось цилиндра 2 и осевую линию оси 5. Аналогично выполнено соединение головки тягового цилиндра. Нижний конец корпуса юдъемного цн.лнндра 2 снабжен кронштейном 7 с вертикальным выступом 8. На чертеже кронн тейн изображен выполненным за одно целое с корпусом цилиндра, однако он может быть закреплен на корпусе на болтах или на сварке. Вертикальный вы стун снабжен с обеих сторон антнфрикционны.ми накладками 9 и установлен в направляющей 10, закрепленной на боковой стенке корпуса (новоротной платфор.ме) экскаватора. Направляющая имеет форму кольцевого сектора с центром, лежащим на осевой линии оси 5, и охватывает выступ с двух сторон. В другом варианте осуществления изобретения (фиг. 3) вертикальный выступ выполнен в виде оси 11, запрессованной в кронштейн 12 и снабженной роликом 13. также установленным в направляющей 10. При необходимости число осей с роликами может быть увеличено, напри.мер до двух или трех. Устройство работает следующим образом. в исходном положении штоки подъемных и тяговых цилиндров втянуты, лыжи приподняты над грунтом. в начале шагания выдвигается шток тягового цилиндра до момента, в котором подъемный цилиндр занимает вертикальное гюложение. Далее выдвигается шток нодъе.много цилиндра, лыжи опускаются на грунт, а затем начинается нодъе.м экскаватора. Если при этом по какой-либо причине, например при шагании по косогору, на лыже возникает поперечная сила F, нанраа/пенная в ту или другую сторону, она воспринимается выступом 8 (роликом 13 ) и передается через направляющую 10 на поворотную платформу экскаватора. Воз.можность такой передачи усилия обеспечивается за счет шарнирного соединения цилиндра с его осью при помощи пальца 6. После окончания подъема втягиваются штоки тяговых цилиндров, причем происходит перемещение экскаватора, нри этом подъемный цилиндр поворачизается вместе со своей осью 5, а выступ 8 (ролик 13) скользит в направляющей 10, продолжая воспринимать поперечные усилия, действующие на лыжу. Далее производится подъем лыжи, и весь цикл шагания повторяется. Использование роликов 13 вместо накладок 9 позволяет уменьшить тренне в направляющей нри повороте подъемного цилиндра.
Таким образом, изобретение обеспечивает разгрузку корпуса подъемного цилиндра, его оси и подшипников оси от поперечных сил, действующих на лыжу. Эти силы через направляющую 10 передаются на
мощный горизонтальный настил поперечной платформы.
Предлагаемый экскаватор позволит уменьщить массу механизма шагания и повысить надежность.
/7Т
Воноёал
Р
сила
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| Опорный узел механизма шагания экскаватора | 1984 |
|
SU1155679A1 |
| Опорное устройство ходового механизма | 1979 |
|
SU861507A1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ УСТРОЙСТВО ЗЕМЛЕРОЙНЫХ МАШИН ТИПА КАРЬЕРНЫХ ЭКСКАВАТОРОВ | 1973 |
|
SU363791A1 |
| Механизм шагания экскаватора | 1981 |
|
SU1004549A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1113492A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Опорное устройство шагающей машины | 1973 |
|
SU620555A1 |
ЭКСКАВАТОР, имеющий лыжи, тяговые и подъемные цилиндры, подсоединенные головками штоков к осям, закрепленным на корпусе экскаватора, отличающийся тем, что, с целью повышения надежности, корпус экскаватора снабжен двусторонней направляющей, а подъемные цилиндры выполнены с выступом, размещенным в двусторонней направляющей, при этом головки штоков подъемных цилиндров соединены с осями при помощи пальцев. и 2-. (Л со 00 4:i. ,рш( г I I L 1С Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Винокурский X | |||
| А | |||
| и др | |||
| Шагающие экскаваторы Уралмашзавода | |||
| М., Машгиз, 1958 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шагающий механизм экскаватора | 1978 |
|
SU920127A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
