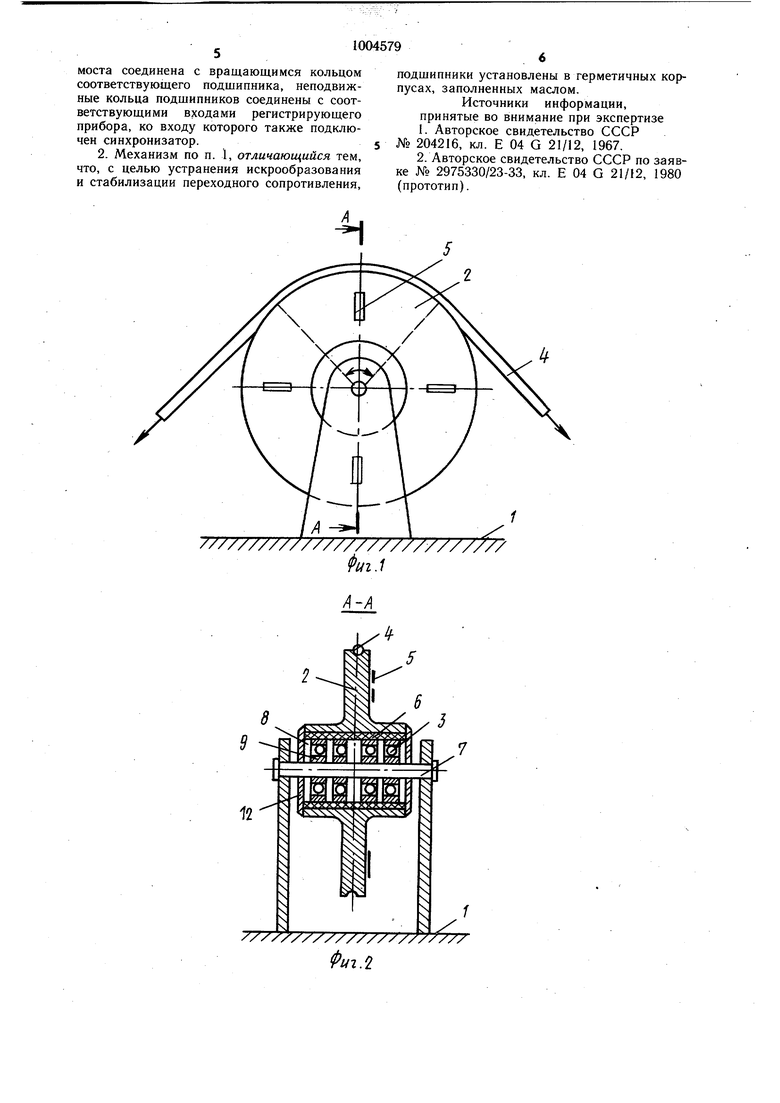
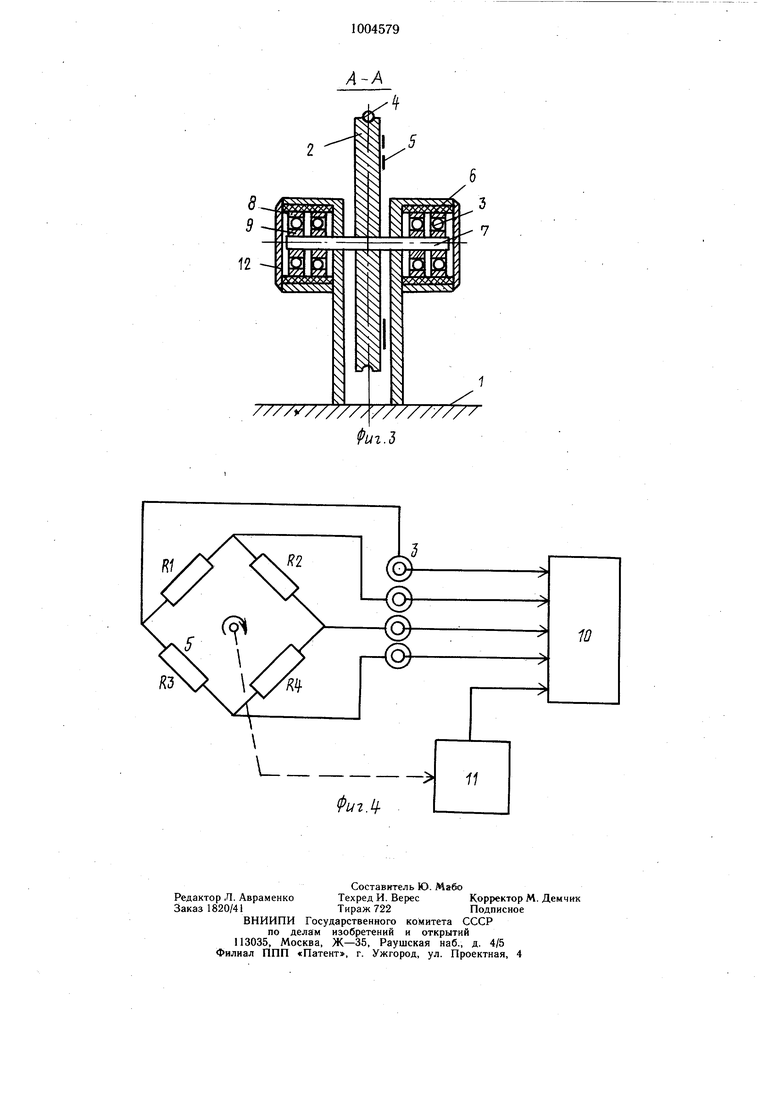
(54) НАПРАВЛЯЮЩИЙ МЕХАНИЗМ АРМАТУРНОНАВИВОЧНОЙ МАШИНЫ Изобретение относится к строительству, а именно к устройствам для предварительного напряжения арматуры. Известен направляющий механизм. арматурно-навивочной машины, содержащий вращающийся диск с огибающей его арматурой, шарнирное связанный с ним через коромысло шток поршня измерительного цилиндра и манометр f. Недостатком известного механизма явлдется пони}кенная точность силы натяжения арматуры вследствие трения в системе цилиндр-порщень и люфтов в щарнирных соединениях злов механизма, что приводит к неоднозначности пвказаний . манометра при колебаниях усилия натяжения. Наиболее б.дизким к предлагаемому является направляющий механизм, арматурно-навивочной машины, содержащий закрепленный на ней вращающийся в подщипниках диск с размещенными на его стенке чувствительными элементами и регистрирующий прибор 2. Недостатки известного механизма заключаются в сложности расщифровки и интерпретации результатов поляризационно-оптических измерений, проведение которых до настоящего времени затруднено в производственных условиях. Необходимые специальные меры по обеспечению несмещаемости элементов устройства во время навивки. Если во время работы арматурно-навивочной мащины будет происходить смещение оптической оси относительно чувствительного элемента, результат измерения будет содержать погрешность, величину которой заранее трудно оценить. Цель изобретения - упрощение процесса измерения усилия натяжения арматуры и повышение надежности работы устройства. Цель достигается тем, что направляющий механизм арматурно-навивочной машины, содержащий закрепленный на ней вращающийся в подшипниках диск, с размещенными на нем чувствительными элементами и регистрирующий усилие натяжения прибор, снабжен синхронизатором, чувствительные элементы выполнены в виде тензорезисторов, соединенных по схеме моста и попарно размещенных во взаимно перпендикулярных диаметральных направлениях, подшипники, количество которых равно количеству вершин моста, электрически изолированы друг от друга, а также от диска и арматурно-навивочной машины, каждая вершина моста соединена с вращающимся кольцом соответствующего подшипника, неподвижные кольца подшипников соединены с соответствующими входами регистрирующего прибора, ко входу которого также подключен синхронизатор. Подшипники установлены в герметичных корпусах, заполненных маслом. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - то же, вариант исполнения; на фиг. 4 - структурная схема соединения элементов устройства. Направляюший механизм содержит закрепленный на арматурногнавивочной машине 1 диск 2, вращающийся в подшипниках 3. Диск огибает напрягаемая арматура 4. На стенке диска размещены чувствительные элементы 5, выполненные в виде тензорезисторов, например, R1-R4. Тензорезисторы соединены по схеме полного сбалансированного моста и попарно размещены во взаимно перпендикулярных диаметральных направлениях. Подшипники 3 электрически изолированы от диска 2 и арматурно-навивочной машины 1, например, посредством установки их во втулке 6 на оси 7, выполненных из изоляционных материалов. Каждая вершина моста подключена к одному из вращающихся колец подшипников 3. В варианте с неподвижной осью диска выводы моста подключены к внешним кольцам 8, а в варианте с вращающейся осью диска - к внутренним кольцам 9 подщипников 3. Неподвижные кольца подщипников подключены к соответствующим входам регистрирующего прибора 10, к входу которого также подключен синхронизатор 11. Подшипники 3 установлены в герметичных корпусах 12, заполненных маслом, например, трансформаторным. Устройство работает следующим образом. Усилия, возникающие в навиваемой арматуре 4, передаются на диск 2, вызывая радиальную деформацию сектора диска, ограниченного точками касания каната. Максимального значения указанная деформация достигает по линии биссектрисы центрального угла оС, образующего нагружаемый сектор. При вращении диска 2 продольные оси каждого из тензорезисторов 5 поочередно совпадают с линией максимальной деформации. Именно в этот момент фор мируется управляющий импульс синхронизатора 11, по команде которого срабатывает регистрирующий прибор 10 и происходит измерение сигнала разбаланса моста. Таким образом, за один оборот диска происходит многократное дискретное измерение усилия натяжения каната. Сигналы разбаланса и питания измерительного моста подаются к соответствующим его диагОналям через подшипники 3, полностью погруженные в трансформаторное масло, что устраняет искрообразование и стабилизирует переходные сопротивления электрических контактов между вращающимися и неподвижными кольцами подщипников. Возможен вариант, при котором источник питания размещен непосредственно на диске 2, в том случае возможно либо уменьшение вдвое числа подшипников, либо увеличение числа чувствительных элементов. В качестве синхронизатора 11 может быть применен, например, светочувствительный элемент и источник света, расположенные по обе стороны диска. При этом в верхней части диска по продольным осям тензорезисторов высверливаются сквозные отверстия. В момент прохождения тензорезистором линии максимальной деформации свет от источника попадает через отверстие на светочувствительный элемент, в результате чего синхронизатор 11 формирует импульс, запускающий регистрирующий прибор 10. Благодаря использованию изобретения упрощается процесс контроля усилия натяжения арматуры при навивке. Результаты тензометрических измерений не нуждаются в дополнительной расщифровке, они связаны простой функциональной зависимостью с усилием в арматуре, что облегчает их интерпретацию. На работу направляющего блока не оказывает влияние вибрация арматурно-навивочной машины. Изменения температуры компенсируются включением тензорезисторов по схеме полного моста. Экспериментально доказано, что подшипники, подпружиненные в трансформаторное масло, стабильно и без искажений передают измерительный сигнал с вращающихся деталей. В целом использование изобретения повыщает надежность работы арматурно-навивочной мащины. Формула изобретения 1. Направляющий механизм арматурнонавивочной машины, содержащий закрепленный на ней вращающийся в подшипниках диск с размещенными на нем чувствительными элементами и регистрирующий усилие натяжения прибор, отличающийся тем, что, с целью упрощения процесса измерения усилия натяжения арматуры и повы- шения надежности работы устройства, он снабжен синхронизатором, чувствительные элементы выполнены в виде тензорезисторов, соединенных по схеме моста и попарно размещенных во взаимно перпендикулярных диаметральных направлениях, подшипники, количество которых равно количеству вершин моста, электрически изолированы друг от друга, а также от диска и арматурно-навивочной машины, каждая вершина
моста соединена с вращающимся кольцом соответствующего подшипника, неподвижные кольца подшипников соединены с соответствующими входами регистрирующего прибора, ко входу которого также подключен синхронизатор.
2. Механизм по п. 1, отличающийся тем, что, с целью устранения искрообразования и стабилизации переходного сопротивления.
подщипники установлены в герметичных корпусах, заполненных маслом.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 204216, кл. Е 04 G 21/12, 1967.
2.Авторское свидетельство СССР по заявке № 2975330/23-33, кл. Е 04 G 21/12, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Арматурно-навивочная машина | 1981 |
|
SU977653A1 |
| Механизм натяжения арматурно-навивочной машины | 1978 |
|
SU729326A1 |
| Направляющий блок арматурно-навивочной машины | 1981 |
|
SU1004580A1 |
| Механизм натяжения арматурно-навивочной машины | 1978 |
|
SU723073A1 |
| Устройство для обкатки механизмов натяжения арматурно-навивочных машин | 1981 |
|
SU1004581A1 |
| Арматурно-навивочная машина | 1980 |
|
SU933912A1 |
| Арматурно-навивочная машина | 1979 |
|
SU798266A1 |
| Арматурно-навивочная машина | 1979 |
|
SU798265A1 |
| МЕХАНИЗМ НАТЯЖЕНИЯ АРМАТУРНО-НАВИВОЧНОЙ | 1973 |
|
SU380815A1 |
| Арматурно-навивочная машина | 1978 |
|
SU709788A1 |
Фиг.1
