1
Изобретение относится к автоматическому управлеиию электроириводами и может быть иснользоваио в локальных системах автоматизированного управления технологическими процессами, в том числе с применением цифровых вычислительных машин.
Известна с 1стема синхронного управления парными электроприводами, используемая, например, для регулировапия положения нажимных винтов прокатных станов. Эта система содержит два канала управления, каждый из которых состоит из последовательно соедииеииых блока задания положеиня, регулятора положения, регулятора скорости и датчиков положения. Датчики положения выполняются аналоговыми (сельсиниыми), что не позволяет получать высокой точности синхрОЕсизации и отработки задания. Для повышения точности в этой системе применяют сложный измеритель рассогласования, содержащий большое количество электромеханических и электромагнитных устройств, что понижает надежность системы в целом. Для некоторого повышения надежности измерители выполняют дискретно-аналоговыми на бесконтактных логических элементах. Тем не менее функцио}1алы1ая надежность этих устройств невысока, так как они содержат элементы памяти-триггеры 1. Наиболее близкой к изобретению по техннческой сущности является цифровая система синхронного управления электроприводами, содержащая два канала управления, каждый из которых состоит из последовательно соединенных блока задания положения, регулятора положен1 я и регулятора скорости электропривода и я-разрядного позиционнокодового датчика 2. Эта система характеризуется малой точностью, что обусловлено многократными преобразованиями «аналог-код
п «цифра - аналог. Кроме того, для запоминання на время цикла измерения величины рассогласования но положению заправляемых объектов в схеме измерителя исиользованы счетчики и логические узлы, содержащие эле ieнты памяти (триггеры), что усложняет устройство и снижает надежность функционирования системы в условиях сильных промышленных помех, а также способствует появлению дополнительной погрешности. Целью изобретения является повышение точности управления. В описываемой системе это достигается тем, что она содержит А-разрядный комбинационный сумматор обратных кодов, одноразрядный комбинационный сумматор, блок
суммирования и блок задания рассогласования по положению, причем числовые входы -разрядного сумматора соединены с соответствующими выходами позициоино-кодовых датчиков, а вход циклического переноса - с
выходом суммы одноразрядного комбинационного сумматора, инвариантные входы которого связаны с выходами (fe+l)-x разрядов позиционно-кодоБых датчиков и с выходом циклического переноса комбинационного сумматора обратных кодов, выход суммы которого соединен с одним из входов блока суммирования, другой вход которого связан с выходом блока задания рассогласования по положению, а выходы блока суммирования и комбинационного сумматора обратных кодов через переключатель соединены с соответствующими входами регуляторов скорости.
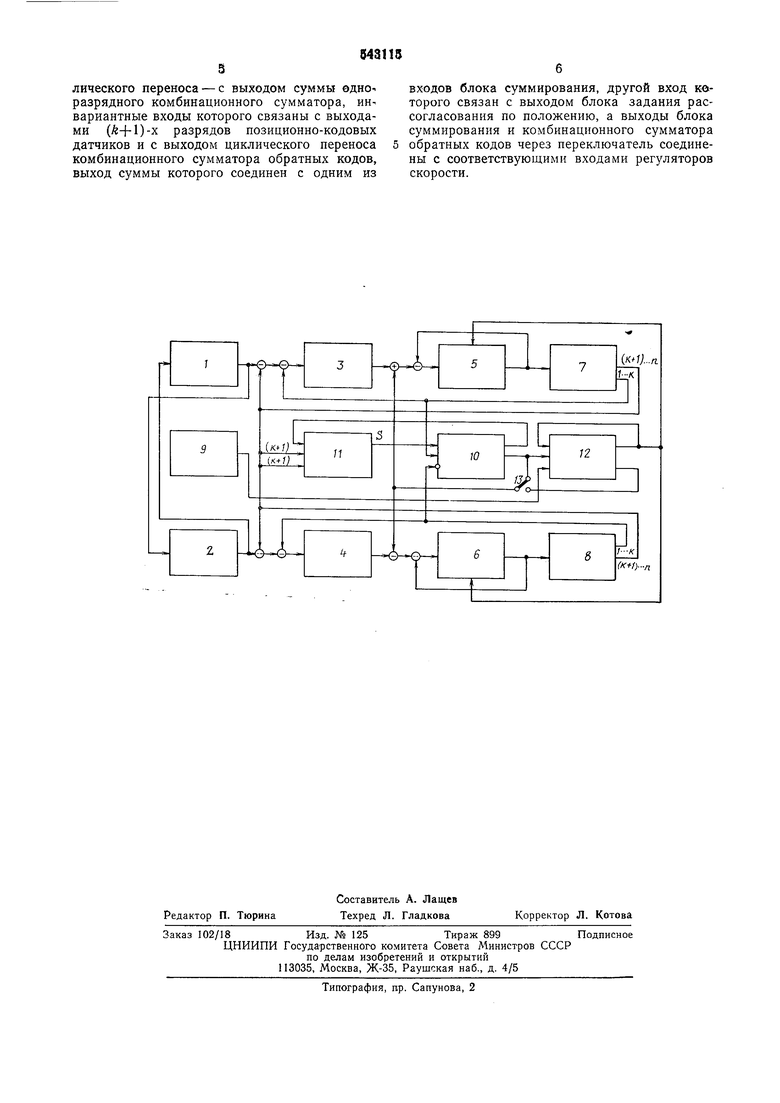
На чертеже представлена функциональная схема описываемой системы.
Она содержит два одинаковых канала раздельного автоматического управления положением двух объектов, каждый из которых состоит из последовательно соединенных «-разрядного блока задания положения 1 (2), регулятора пололсения 3 (4), регулятора скорости электропривода 5 (6) ц «-разрядного позиционно-кодового датчика положения электропривода 7 (8). Кроме того, схема содержит блок задания рассогласования по положению двух объектов 9, /е-разрядный комбинационный сумматор обратных кодов 10 для вычисления рассогласования взаимного положения двух объектов, одноразрядный комбинациониый сумматор 11, используемый в качестве знакового разряда сумматора 10, а также дополнительный ()-H разрядный блок суммирования 12 и переключатель 13; блоки 9, 11, 10 и 12 образуют регулятор рассогласования по положению между электроприводами системы.
В режиме синхронного управления обоими электроприводами общее задание положения объектов производится с помощью одного из блоков задания положения 1 или 2. Это задание в виде п-разрядпого кода подается на входы обоих регуляторов положения 3 и 4, где оно сравнивается с сигналами датчиков обратной связи по положению 7 и 8, условно разделенными (см. чертеж) на сигналы младших разрядов 1 ... и сигналы старших разрядов (/г+1) ... п. Выходной сигнал каждого регулятора положения поступает иа вход соответствующей системы автоматического регулирования скорости электропривода 5 и 6, где с противоположными знаками для обеих систем к нему алгебраически прибавляется сигнал рассогласования по положению между обоими объектами, снимаемый с выхода суммы сумматора обратных кодов 10 в одном положении переключателя 13 или с выхода суммы дополнительного блока суммирования 12- другом положении переключателя. Далее сигнал задания скорости отрабатывается реуляторами 5 и 6 так, что оба объекта управления перемещаются синхронно.
На суммирующие входы комбинационного умматора 10 подаются сигналы k младших азрядов обоих датчиков положения, причем предполагается, что число, поступающее с атчика 7, всегда положительно, а число, поступающее с датчика 8, всегда отрицательно. Кроме того, число разрядов k комбинационного сумматора 10 определяется максимально возможными рассогласованием положений обоих объектов при синхронном управлении ими, которое значительно меньше максимальных рабочих перемещений объектов, определяющих число разрядов датчиков 7 и 8 и блоков задания положения 1 и 2. Поэтому на входы
одноразрядного комбинационного сумматора знакового разряда 9 подаются сигналы (/г-f 1)-х разрядов обоих датчиков положения 7 и 8 и сигнал циклического переноса ЦП с выхода старшего разряда комбинационного
сумматора 10, а с выхода суммы 5 сумматора 9 сигнал поступает на вход циклического переноса сумматора 10. Тогда иа выходе последпего получается сигнал б, равный разности пололсений обоих объектов в прямом
коде, знак которого выражается сигналом 5, как это обычно принято при суммировании чисел в обратном коде.
Положение переключателя 13 зависит от требуемого рассогласования по положению
между объектами в системе: если требуемое рассогласование отличается от нуля, то оно подается с выхода блока задания рассогласования 9 на вход блока суммирования 12, где суммируется с рассогласованием б, а с выхода блока 12 суммарный сигнал с помощью переключателя 13 ко.ммутируется па вход регуляторов 5 и 6 для отработки; в случае нулевого требуемого рассогласования переключатель 13 устанавливается в противоположное положение, при этом с блока задания рассогласования 9 задается предельно допустимое рассогласование положения объектов, которое сравнивается в блоке суммирования 12 с фактическим рассогласованием 6, и, если фактическое
рассогласование превышает допустимое, сигнал со знакового выхода сумматора 12 блокирует работу обеих систем регулирования скорости 5 и 6. Описываемая система позволяет повысить
точность позиционирования, в сравнении с известными, более чем в два раза.
Формула изобретения
Цифровая система синхронного управления приводами, содержащая два канала управления, каждый из которых состоит из последовательно соединенных блока задания положения,
регулятора полол еиия и регулятора скорости электропривода и п-разрядиого позиционнокодового датчика, отличающаяся тем, что, с целью повышения точности системы, она содержит й-разрядный комбинационный сумматор обратных кодов, одноразрядный комбинационный сумматор, блок суммирования и блок задания рассогласования по положению, причем числовые входы / -разрядного сумматора соединены с соответствуюш,ими выходами позициоиио-кодовых датчиков, а вход циклического переноса - с выходом суммы вдноразрядного комбннационного сумматора, инвариантные входы которого связаны с выходами (k+l)-x разрядов позиционно-кодовых датчиков и с выходом циклического переноса комбинационного сумматора обратных кодов, выход суммы которого соединен с одним из
входов блока суммирования, другой вход которого связан с выходом блока задания рассогласования по положению, а выходы блока суммирования и комбинационного сумматора обратных кодов через переключатель соединены с соответствующими входами регуляторов скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимый п-разрядный сумматор | 1979 |
|
SU824204A1 |
| Аналого-цифровой сумматор | 1986 |
|
SU1316006A1 |
| Универсальное суммирующее устройство | 1990 |
|
SU1786484A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| ПАРАЛЛЕЛЬНЫЙ АСИНХРОННЫЙ СУММАТОР | 1994 |
|
RU2097826C1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Сумматор по переменному модулю | 1990 |
|
SU1756884A1 |
| Устройство для умножения | 1987 |
|
SU1501043A1 |
| Функциональный преобразователь | 1973 |
|
SU470820A1 |
| Процессорный элемент | 1980 |
|
SU881757A1 |
