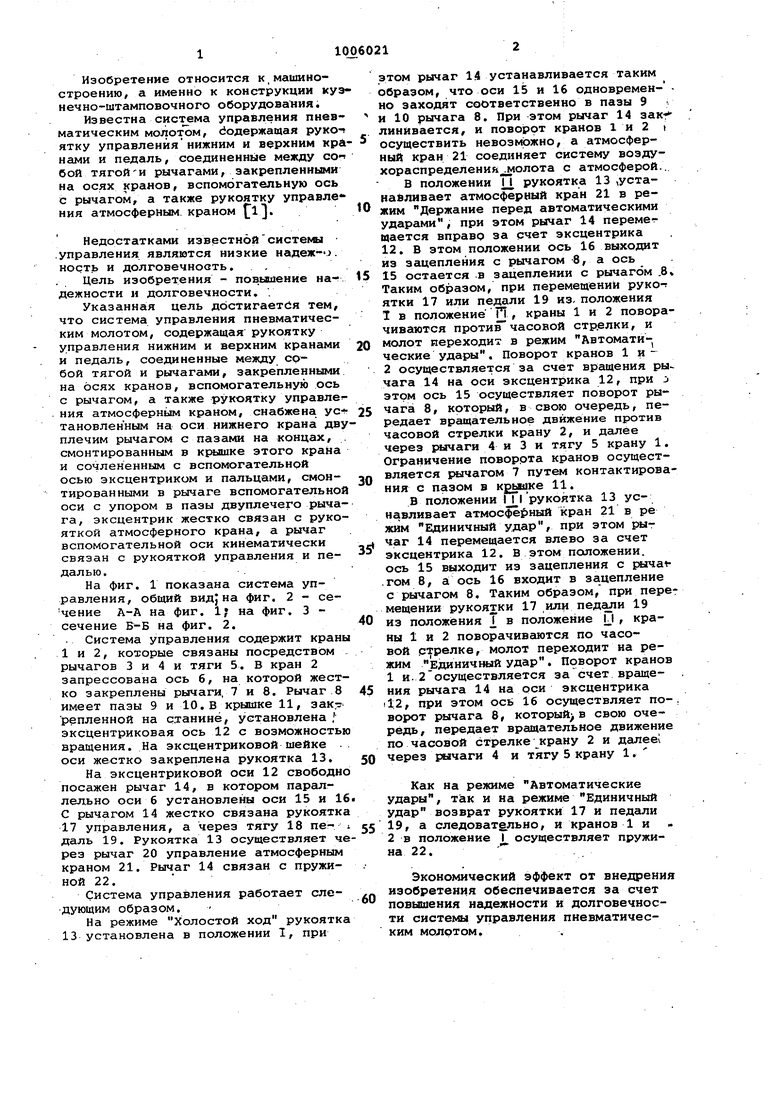
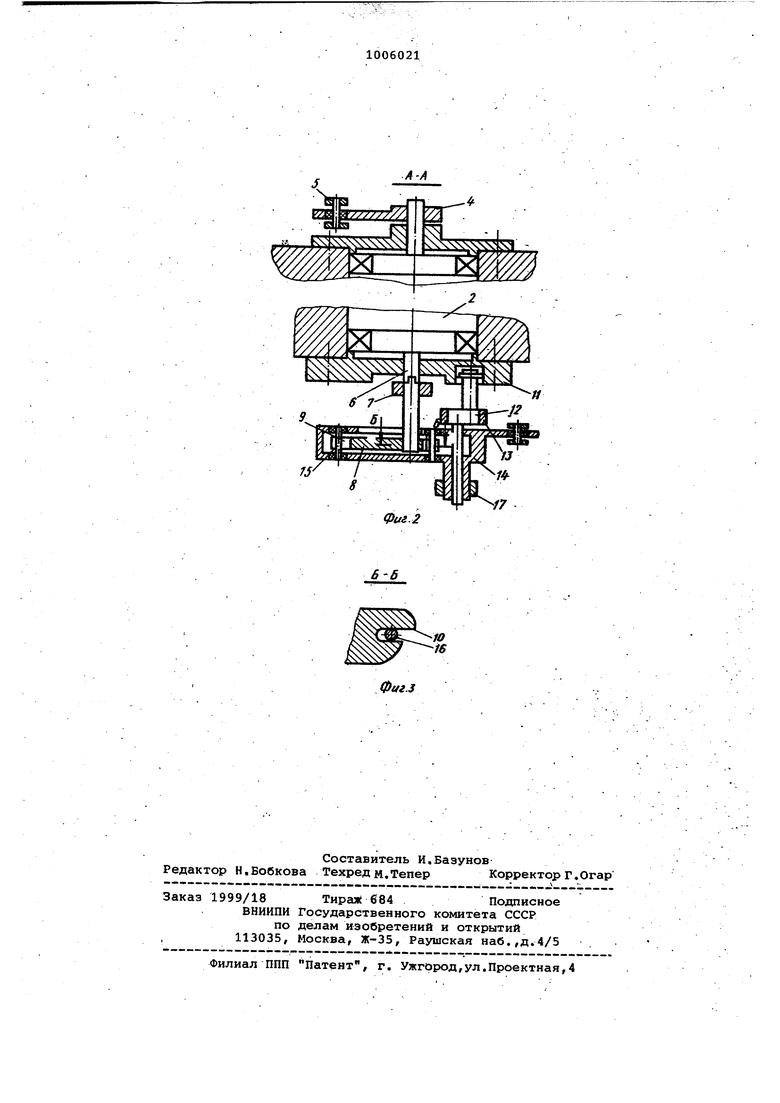
Изобретение относится к,машиностроению, а именно к конструкции ку нечно-штамповочного оборудования. Известна система управления пнев матическим молотЪм, йодержащая рукоч ятку управлениянижним и верхним кра нами и педаль, соединенные между собой тягойИ рычагами, закрепленными на осях кранов, вспомогательную ось с рычагом, а также рукоятку управле ния атмосферным краном fl. Недостатками известнойсистема .управления являются низкие надеж-), ность и долговечность. Цель изобретения - пов.ышение надежности и долговечности. . Указанная цель достигается тем, что система управления пневматическим молотом, содержащая рукоятку управления нижним и верхним кранами и педаль, соединенные между србой тягой и рычагами, закрепленными на осях кранов, вспомогательную ось с рычагом, а также рукоятку управле ния атмосферным краном, снабжена установленным на оси нижнего крана дву плечим рычагом с пазами на концах, смонтированным в к ядике этого крана и сочлененным с вспомогательной осью эксцентриком и пальцами, смонтированными в рычаге вспомогательной оси с упором в пазы двуплечего рычага, эксцентрик жестко связан с рукояткой атмосферного крана, а рычаг вспомогательной оси кинематически связан с рукояткой управления и педалью.. На фиг. 1 показана система управления, общий видiна фиг, 2 - сечение А-А на фиг. 1у на фиг. 3 сечение Б-Б на фиг. 2. Система управления содержит краны 1 и 2, которые связаны посредством рычагов 3 и 4 и тяги 5. В кран 2 запрессована ось 6, на которой жестко закреплены рычаги, 7 и 8. Рычаг 8 имеет пазы 9 и 10. В крышке 11, репленной на станине, установлена . эксцентриковая ось 12 с возможностью вращения. На эксцентриковой шейке . оси жестко закреплена рукоятка 13. На эксцентриковой оси 12 свободно посажен рычаг 14, в котором параллельно оси 6 установлены оси 15 и 16 С рычагом 14 жестко связана рукоятка 17 управления, а через тягу 18 пе- i даль 19. Рукоятка 13 осуществляет че рез рычаг 20 управление атмосферным краном 21. Рычаг 14 связан с пружиной 22. Система управления работает еледующим образом. На режиме Холостой ход рукоятка 13 установлена в положении 1, при этом рычаг 14 устанавливается таким образом, что оси 15 и 16 одновремен- но заходят соответственно в пазы 9 и 10 рычага 8. При этом рычаг 14 закт линивается, и поворот кранов 1 и 2 t осуществить невозможно, а атмосферный кран 21 соединяет систему воздуxopacпpeдeлeнияJиoлoтa с атмосферой.. В положении И. рукоятка 13 ,устанавливает атмосферный кран 21 в режим Держание перед автоматическими ударами, при этом рычаг 14 перемет цается вправо за счет эксцентрика 12. В этом положении ось 16 выходит из зацепления с рычагом 8, а ось 15 остается в зацеплении с рычагом .8 Таким образом, при перемещений руко-т ятки 17 или педали 19 из- положения 1в положение Г , краны 1 и 2 поворачиваются против часовой стр.елки, и молот переходит в режим Автоматические удары, Поворот кранов 1 и2осуществляется за счет вращения ры-. чага 14 на оси эксцентрика 12, при j этом ось 15 осуществляет поворот рычага 8, который, в свою очередь, передает вращательное движение против часовой стрелки крану 2, и далее через рычаги 4 и 3 и тягу 5 крану 1. Ограничение поворота кранов осуществляется Еялчагом 7 путем контактирования с пазом в крышке 11. В положении IJ lpyKOHTKa 13 уснавливает атмосферный кран 21 в ре жим Единичный удар, при этом рыт чаг 14 перемещается влево за счет эксцентрика 12. В этом положении, ось 15 выходит из зацепления с j«4av .гом 8 а: ось 16 входит в зацепление с рычагом 8. Таким образом, при перемещении рукоятки 17 или педали 19 из положения Т в положение И, краны 1 и 2 поворачиваются по часовой стрелке, молот переходит на режим Единичный удар. Поворот кранов 1и. 2 осуществляется за счет вращения рычага 14 на оси эксцентрика il2, при этом оси 16 осуществляет по-, ворот рычага 8, который в свою очередь, передает вращательное движение по часовой стрелке крану 2 и дгшее через рычаги 4 и тягу 5 крану 1. Как на режиме Автоматические удары, так и на режиме Единичный удар возврат рукоятки 17 и педали 19, а следовательно, и кранов 1 и 2в положение I осуществляет пружина 22. Экономический эффект от внедрения изобретения обеспечивается за счет повышения надежности и долговечности системы управления пневматическим молотом. .
/-/f
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пневматическим молотом с закрепленным на станине ресивером | 1982 |
|
SU1038041A1 |
| Система управления пневматическим молотом | 1978 |
|
SU721229A1 |
| Система управления пневматическим молотом | 1981 |
|
SU1063522A1 |
| Устройство для управления муфтой сцепления и двигателем транспортного средства | 1985 |
|
SU1261810A1 |
| МОЛОТ ПАРОВОЗДУШНЫЙ | 1967 |
|
SU200397A1 |
| Устройство управления акселератором и тормозом транспортного средства | 1986 |
|
SU1350053A1 |
| Прокатный стан | 1989 |
|
SU1724400A1 |
| ВОДОПРОВОДНЫЙ КРАН | 1991 |
|
RU2023928C1 |
| АВТОМАТ, КОСОПАЗОВОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, ПРИЦЕЛ С БОКОВЫМ ВИЗИРОМ (ВАРИАНТЫ) | 2000 |
|
RU2191338C2 |
| Гайковерт | 1989 |
|
SU1650422A1 |
СИСТЕМА УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ МОЛОТОМ, содержащая рукоятку управления нижним и верхним крана ми и педаль, соединенные между собой тягой и рычагами, закрепленными на осях кранов, вспомогательную ось с рычагом, а также рукоятку управления атмосферным краном, отличающаяся .тем, что, с целью повышения надежности и долговечности,она снабжена установленным на оси ниж -негр крана двуплечим {жчагом с паза-г ми на концах, смонтированным в крыш- , ке этого крана и сочлененным с вспомогательной осью эксцентриком и пальцами, смонтированными в рычаге вспомогательной оси с упором в пазы двуплечего рычага, эксцентрик жестко связан с рукояткой атмосферного крат- Q на, а рычаг вспомогательной оси кине:$8 матически связан с рукояткой управле ния и педальюV
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
