Паровоздушный штамповочный молот двойного действия, содержаш,ий рабочий цилиндр, соединенный с распределительным золотником, и рукоятку управления, известен.
Предложенный молот отличается от известного тем, что он снаблсен устройством для регулирования кратности автоматического хода золотника, выполненным в виде кулисного механизма, кулисный камень которого связан с золотником и с рукояткой управления.
Это позволяет экономить энергоноситель.
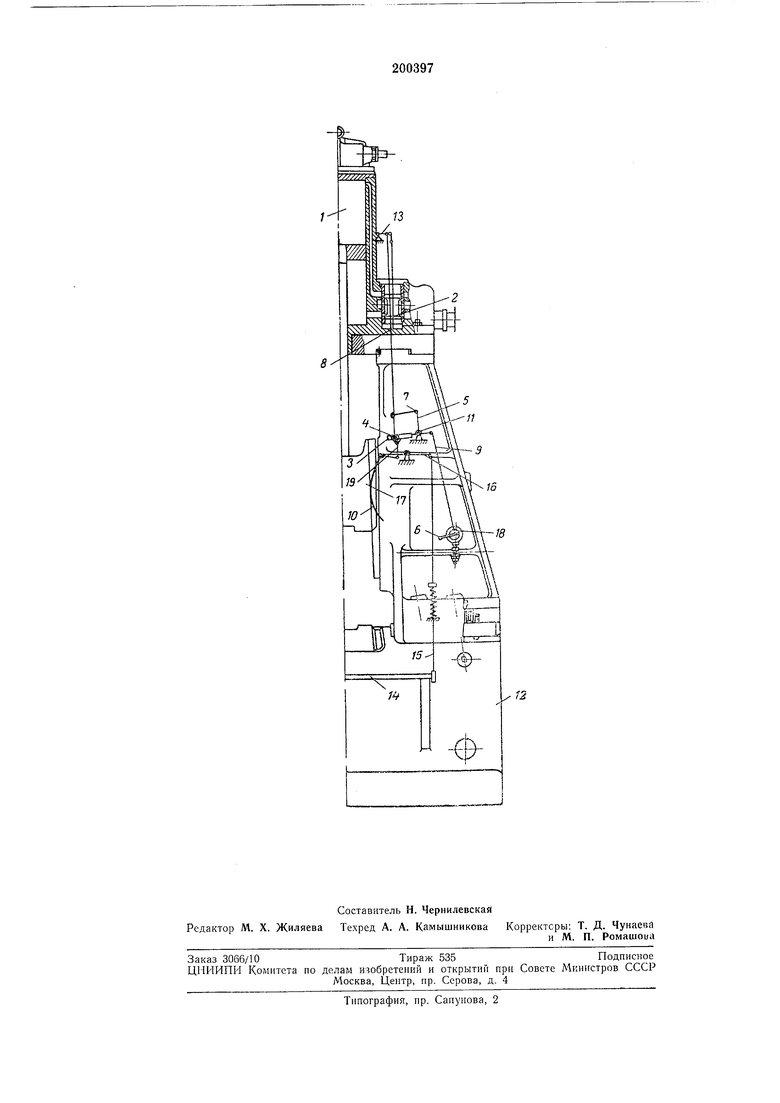
Конструкция предложенного молота представлена на чертеже.
Молот состоит из рабочего цилиндра /, соединенного с распределительным золотником 2, и устройства для регулирования кратности автоматического хода золотника.
Устройство выполнено в виде кулисного механизма, состояш.его из качаюш;его коромысла 3 с пазом, внутри которого перемеш,ается ползушка 4, двуплечего рычага 5, эксцентрика 6 и тяг 7, 8 и 9. Коромысло соединяется с криволинейным рычагом 10 и имеет постоянный угол качания вокруг оси 11, закрепленной на станине 12.
Рычаг 13 золотника соединяется тягой 8 с ползушкой 4 (или ,кулисным камнем), положение которой относительно оси качания коромысла 3 изменяется посредством эксцентрика 6, соединенного тягой 9 с рычагом 5.
Перемен ;ение золотника для нанесения удара производится от педали 14 через систему тяг 15 м 16.
Перед пуском баба 17 молота находится в крайнем нижнем ноложении, недаль 14 свободна, окна золотника 2 сообп1,ают нижнюю полость рабочего цилиндра / с подводящей магистралью.
При нодаче энергоносителя к золотнику баба начинает движение вверх и золотник нерекрытием окон ирекран1ает доступ энергоносителя в рабочий цилиндр. После этого баба поднимается за счет расширения энергоносителя в нижней полости. Из верхней полости цилиндра производится сначала выпуск энергоносителя в атмосферу через золотник, а затем сжатие его оставшейся части.
В момент уравновешивания работ энергоносителя нижней и верхней нолостей рабочего цилиндра (с учетом работы веса подающих частей и сил трения) баба должна остановиться в верхней мертвой точке.
Совнадение момента уравновешивания работ с верхней мертвой точкой бабы устанавливается подбором момента отсечки золотником подачи энергоносителя в нижнюю полость цилиндра. Эта отсечка производится перемещением рукоятки 18 эксцентрика 6, на корпусе которого имеются насечки, соответствующие давлению энергоносителя. Для нормальной работы молота рукоятку эксцентрика необходимо перевести в положение, соответствующее давлению энергоносителя в подводящем трубопроводе.
Движение бабы вниз из верхней мертвой точки при автоматических холостых ходах происходит за счет сравнительно небольшой вновь впускаемой порции энергоносителя и работы веса подающих частей. В нижней части рабочего цилиндра в это время производится ежатие энергоносителя. Остановка бабы внизу произойдет при уравновешивании работ активных сил и сил сопротивления.
Удар по поковке наносится из верхнего ,положения бабы путем лажатия на педаль 14. При этом через тяги 15, /9 и S и рычаги 16, 10 и 13 золотник получает дополнительное перемещение вверх, в результате чего период наполнения энергосителем верхней полости увеличивается, а баба наносит удар.
Величина энергии удара зависит от величины дополнительного перемещения золотника нри нажатии педали.
Предмет изобретения
Молот паровоздушный, штамповочный двойного действия, содержащий рабочий цилиндр, соединенный с распределительным золотником, и рукоятку управления, отличающийся тем, что, с целью экономии энергоносителя, он снабжен устройством для регулирования кратности автоматического хода золотника, выполненным в виде кулисного механизма, кулисный камень которого связан с золотником и с рукояткой управления.
Ю
.Jr5..:i-Cv.JiA i
/51
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления золотником паровоздушного молота | 1977 |
|
SU671912A1 |
| Механизм для управления золотником штамповочного молота | 1978 |
|
SU730434A1 |
| Бесшаботный штамповочный молот | 1955 |
|
SU112789A1 |
| Устройство управления молотом | 1975 |
|
SU584955A1 |
| ПАРОВОЗДУШНЫЙ молот | 1967 |
|
SU199645A1 |
| Система управления пневматическим молотом | 1987 |
|
SU1438902A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ КОВОЧНЫМ МОЛОТОМ | 1969 |
|
SU244846A1 |
| Система управления паровоздушным молотом | 1974 |
|
SU512846A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| КОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2005 |
|
RU2327542C2 |