Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, предназначенных для подъемно-транспортных работ, где необходимо сохранение положения оси цилиндрической детали в губках схвата при недостаточно точном исходном положении детали.
Известен захват, содержащий зажимной механизм и пальцы с призматическими губками 1.
Недостатком известного схвата является то, что при самоустановке детали в призмах происходит интенсивный износ поверхностей призм, что снижает надежность ориентирования детали в схвате и долговечность последнего.
Цель изобретения - повышение надежности и долговечности.
Цель достигается тем, что в основных призматических губках выполнены направ.ляющие, в которых расположены дополнительно введенные подпружиненные призматические элементы, причем последние выполнены из материала, имеюшего меньший коэффициент трения с материалом детали, чем коэффициент трения материала губок.
На фиг. 1 изображен схват, общий вид; на фиг. 2 - узел I на фиг. 1.
Схват содержит зажимной механизм 1 и пальцы, оканчивающиеся призматическими губками 2.
Губка состоит из корпуса, выполненного заодно с пальцем, являющегося неподвижной призмой, утапливаемого призматического элемента 3, поджимаемого пружиной 4, расположенного в направляющих губки.
Схват работает следующим образом.
При сближении призматических губок
захватываемая цилиндрическая деталь
касается и скользит по одной из сторон
выступающего призматического элемента 3,
с малым коэффициентом трения до контакта со второй его стороной. После этого под действием сил зажима выступающий элемент 3 утапливается, двигаясь в направляющих губки. Деталь зажимается призмой губок 2, имеющей больщий коэффициент
трения.
Предлагаемая конструкция захватного устройства позволяет увеличить угол при вершине призмы, что повышает точность и надежность при работе с цилиндрическими заготовками.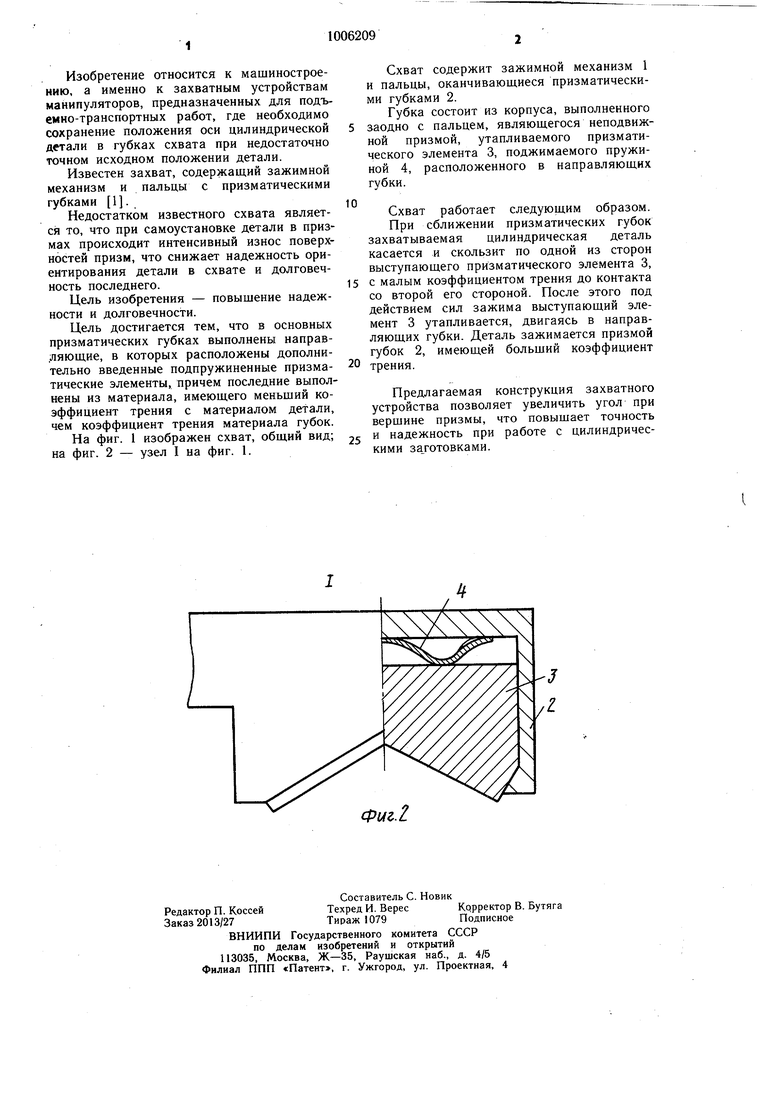
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват для цилиндрических деталей | 1984 |
|
SU1266734A1 |
| Схват | 1983 |
|
SU1085811A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват для цилиндрических деталей | 1983 |
|
SU1138315A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| Захватное устройство | 2022 |
|
RU2804513C1 |
СХВАТ ДЛЯ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ содержащий зажимной механизм и пальцы с призматическими губками, отличающийся тем, что, с целью повышения надежности и долговечности, в призматических губках выполнены направляющие, в которых расположены дополнительно введенные подпружиненные призматические элементы, причем последние выполнены из материала, имеющего меньший коэффициент трения с материалом детали, чем коэффициент трения материала губок.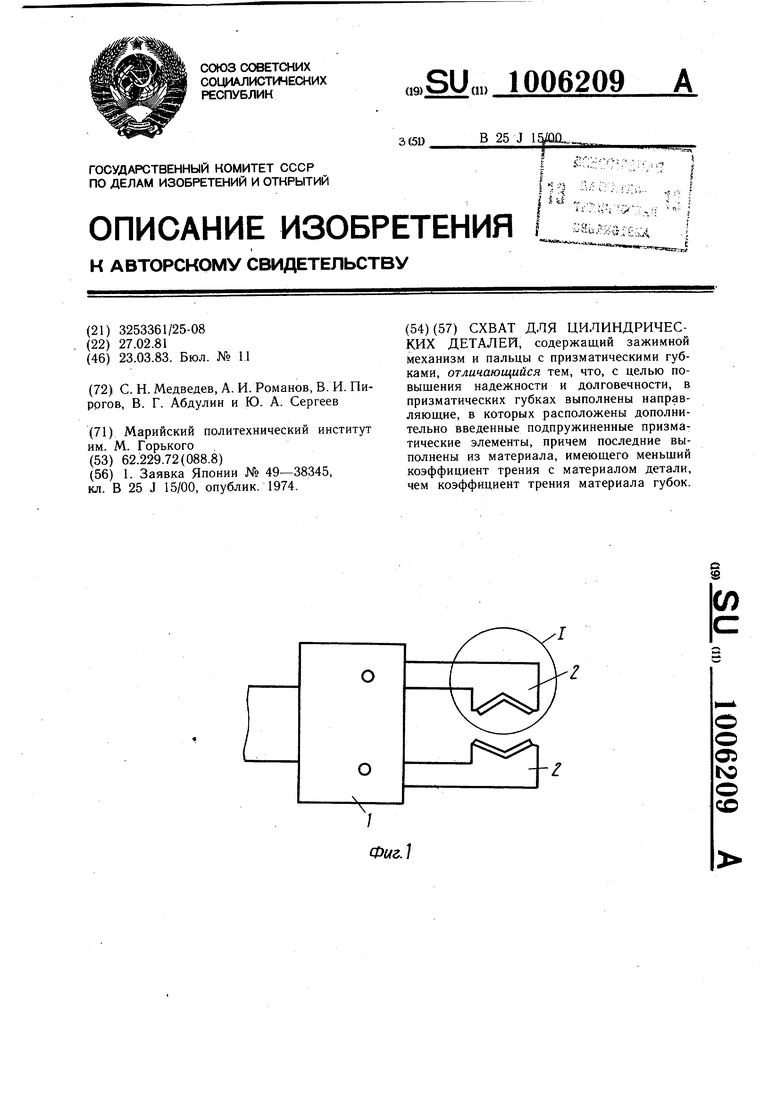
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
