U3.f Фиг. Г 2
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, предназначенных для подъемно-транспортных работ, где необходимо базировать деталь и сохранить положение оси цилиндрической детали в губках детали.
Цель изобретения - повышение надежности схвата в работе.
На фиг. 1 изображен схват, обший вид; на фиг. 2 - узел I на фиг. 1.
Схват содержит зажимной механизм 1, пальцы 2, каждый из которых имеет на конце упор, образующий одну из половин призматической губки, подпружиненную относительно пальца пластинчатой пружиной 3, вторую половину призматической губки 4, взаимодействуюш,ую с установленным на пальце 2 вибратором 5 и выключателем 6.
Схват работает следуюшим образом.
В начале сведения пальцев под действием зажимного механизма 1 включаются диаметрально расположенные вибраторы 5, которые воздействуют на подпружиненные части призматических губок 4 и вызывают их колебания. После контакта вибрирующей части призматической губки с нецентрированной деталью последняя под действием враш.аюш,его момента от вибрирующих частей начинает поворачиваться и смещаться к центру призмы, при этом .наряду с центрированием детали в губке происходит наиболее надежное базирование по наружной поверхности детали. При установке манипулятора в зажимную оснастку станка деталь типа тела вращения с выступом вводится в зажимной механизм оснастки с зазором в радиальном и окружном направлениях. Затем включается предварительный слабый зажим детали механизмом оснастки с одновременным ослаблением зажима пальцами 2 схвата. При этом срабатывает выключатель 6 и подпружиненные половины призматических губок 4 начинают вибрировать от вибратора 5, поворачивая деталь вокруг ее оси до тех пор, пока выступ детали не упрется в базирующий элемент оснастки. После этого включается зажим детали в оснастке, происходят разведение пальцев схвата и выключение вибратора.
Использование предлагаемого схвата позволяет надежно центрировать неточно ориентированную деталь при ее захвате и точно базировать в окружном направлении при установке в технологическое оборудование, 5 а также обеспечивать надежное удержание детали с погрешностями формы поверхности.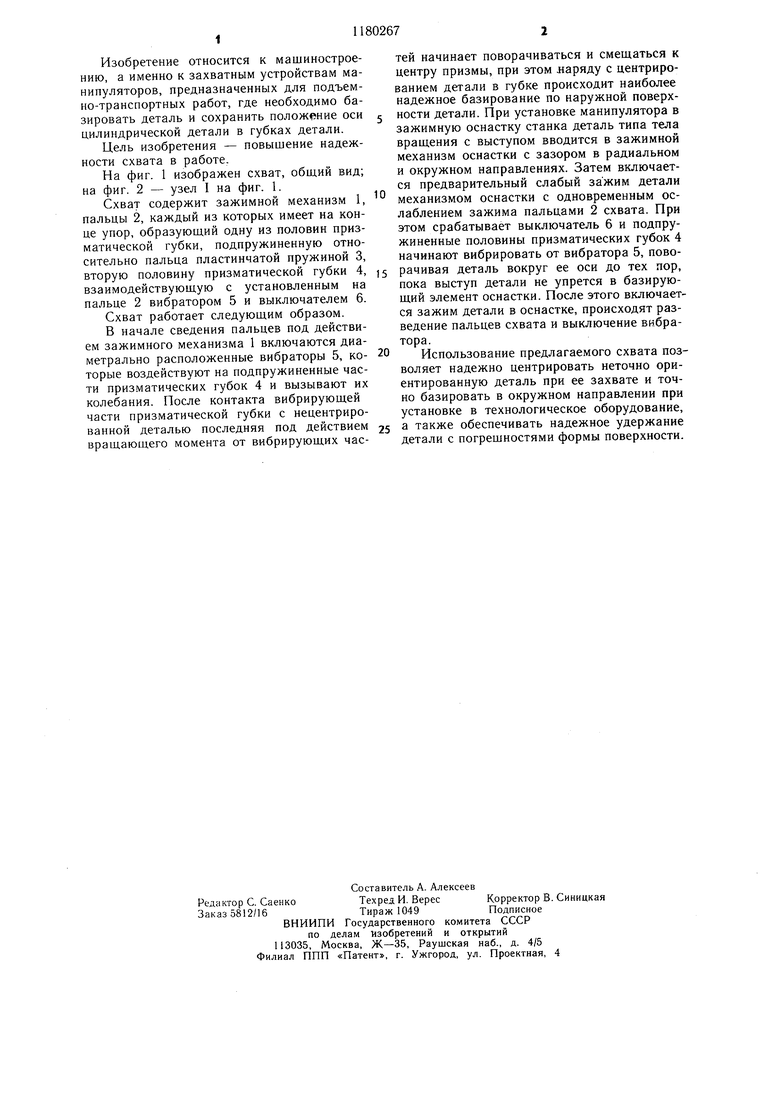
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1085811A1 |
| Схват манипулятора | 1984 |
|
SU1301696A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват для цилиндрических деталей | 1981 |
|
SU1006209A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Схват для цилиндрических деталей | 1984 |
|
SU1266734A1 |
| Схват | 1987 |
|
SU1407796A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
СХВАТ, содержащий корпус, привод и пальцы с подпружиненными губками, снабженными вибраторами, и датчики, размещенные на пальцах с возможностью взаимодействия с губками, отличающийся тем, что, с целью повышения надежности в работе, пальцы снабжены упорами, образующими с губками призматические поверхности зажима.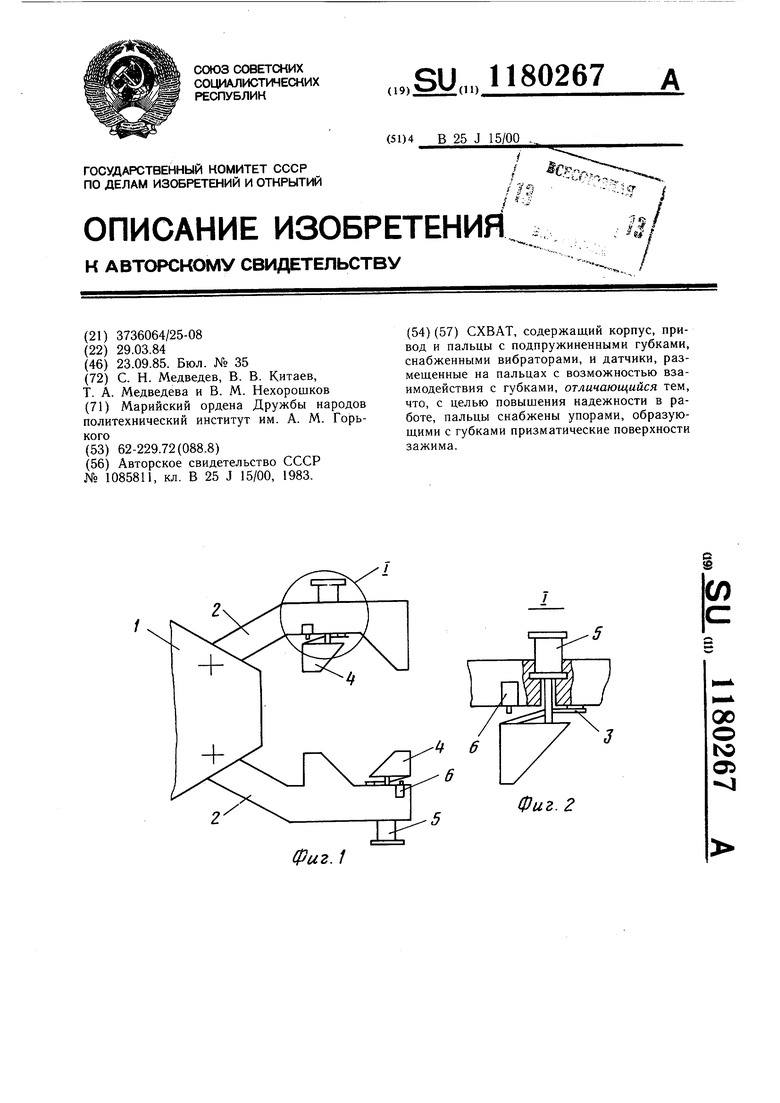
| Схват | 1983 |
|
SU1085811A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
