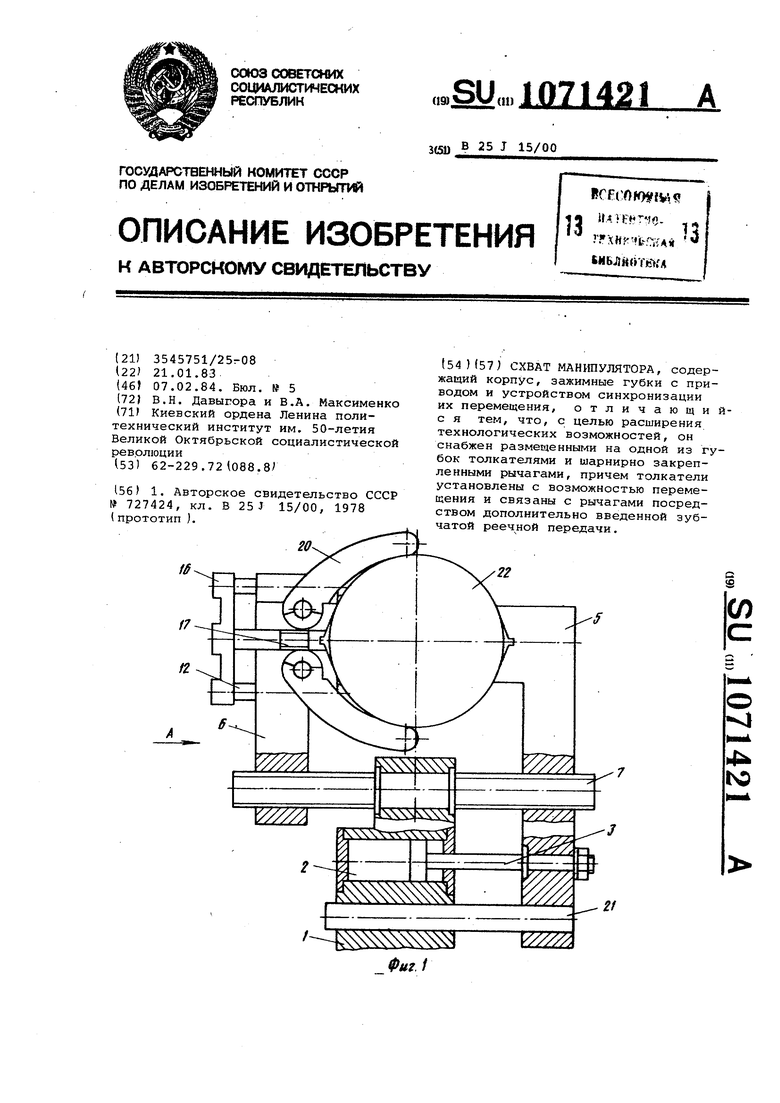
Изобретение относится к робототе нике и может найти применение в качестве захватного устройства про мьпшенных роботов. Известен схват манипулятора, содержащий корпус, зажимные губки с приводом и устройством синхронизации их перемещения С1 l. Недостатком известного охвата является то, что он не позволяет захватывать детали в широком диапа зоне диаметров, что сужает техноло гические возможности. Цель изобретения - расширение технологических возможностей. Цель достигается тем, что схват снабжен подпружиненными толкателям и шарнирно закрепленными рычагами, размещенными на одной из губок охвата, причем толкатели размещены с возмох ностью перемещения в напра лении перемещения губок и связаны с рычагами посредством зубчато-реечной передачи. На фиг, 1 изображен предлагае1 1й схват с местными разрезами, общий вид; на фиг. 2 - вид А на фиг. 1, устройство повернуто проти часовой стрелки на 90°; на фиг, 3 вид Б на фиг. 2; на фиг. 4 - исход ное положение схвата. Схват манипулятора состоит из корпуса 1, размещенных в нем силов цилиндров 2 с разнонаправленными штоками 3 и 4, которые закреплены в губках 5 и б. В корпусе 1 с возможностью вращения размещен синхро .низирующий винт 7, на концах которого нарезаны участки разносторонних несамотормозящих резьб. Губки 5 и 6 имеют отверстия под резьбу винта 7 и кинематически с ним связаны. В губке б выполнены отверсти в которых расположены толкатели 8 и 9, имеющие продольные пазы 10 и осевые отверстия. В этих отверстиях установлены пружины 11, сжат осями 12. Оси застопорены в толкат лях 8 и 9 при помощи штифтов 13 с возможностью их взаимного перемещения при сжатии пружин 11. Между задними торцами толкателей 8 и 9 и гайками 14 расположены пружины 1 1 Оси 12 запрессованы в плиту 16. В эту же плиту запрессована двухсторонняя рейка 17. Рейка 17 связана с зубчатыми колесами 18, расположенными на осях 19, на которые также напрессованы рычаги 20, Запрессованные в губки 5 и б направляющие 21 расположены с возможностью осевого перемещения в корпусе 1. Позицией 22 показана зажимаемая деталь. Схват работает следующим образом. При подаче в штоковые полости силовых цилиндров 2 воздуха или жидкости штоки 3 и 4 начинают перемещаться, сводя губки 5 и 6. Синхронизация движения губок обеспечивается винтом 7. Если захватываемая деталь имеет диаметр, меньший чем расстояние между толкателями 8 и 9 (фиг. 3), то при ее зажиме.не участвуют толкатели 8 и 5 и рычаги 20. Деталь зажимается только ja призмах губок. Если диаметр детали больше, чем расстояние между толкателями 8 и 9, то при ее зажиме толкатели 8 и 9 утапливаются в губтсу 6, передвигая оси 12, плиту 16 и двухстороннюю зубчатую рейку 17. Рейка, воздействуя на зубчатые колеса 18, сводит рычаги 20, которые устанавливают зажимаемую деталь по оси призм. При дальнейшем утапливании толкателей 8 и 9 в губке 6 сжимаются пружины 11, создавая зажимное усилие рычагам 20. При разведении губок 5 и б толкатели 8 и 9 получают возможность под действием пружины 15 выдвинуться из губки 6 и через штифт 13 начинают перемещать оси 12,- плиту 16 и зубчатую рейку 17. Перемещаясь, рейка 17 воздействует на зубчатые колеса 18 и разводит рычаги 20. Таким образом осуществляется освобождение детали из схвата. Применение предложенного схвата позволяет получить экономический эффект за счет расширения номенклатуры захватываемых деталей, снижения точности расположения деталей в устройствах подготовки среды и упрощения их конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват | 1987 |
|
SU1440707A2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват | 1986 |
|
SU1390021A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |

СХВАТ МАНШУЛЯТОРА, содержащий корпус, зажимные губки с приводом и устройством синхронизации их перемещения, отличающийс я тем, что, с целью расширения технологических возможностей, он снабжен размещенными на одной из губок толкателями и шарнирно закрепленными рычагами, причем толкатели установлены с возможностью перемещения и связаны с рычагами посредством дополнительно введенной зубчатой реечной передачи. W/7