1
Изобретение относится к области автоматизации промышленного производства и может найти применение в системах управления металлорежущими станками.
Известна счетно-импульсная система программного управления, содержащая блок ввода, импульсный датчик перемещения, реверсивный счетчик, счетчик фиксированного числа импульсов, генератор, логический блок и исполнительный орган.
В известной системе блок ввода связан с реверсивным счетчиком через схему равнозначности, а для получения сигналов упреждения, в промежуток времени между двумя очередными импульсами на выходе К-го разряда, на К+1 -и разряд реверсивного счетчика подаются пробные импульсы.
Схема равнозначности не позволяет получить сигнал о направлении привода, а многократное введениеи выведение пробных импульсов в процессе отработки перемещения увеличивает вероятность сбоя работы реверсивного счетчика. При задании перемещения , величина которого определяется числом импульсов,меньшим удвоенного числа единиц в К разрядах реверсивного счетчика, сигнал упреждения не вьщается или вьщается позже предусмотренного cxeNfoft счетчика фиксированного числа импульсов. Задание величины упреждения ограничено промежутком времени между двумя очередными импульс.ами на выходе К-го разряда реверсивного счетчика, а дискретность изменения и разброс ее при отработке не могут быть менее числа единиц Б К разрядах реверсивного счетчика. Это усложняет программирование, снижает быстродействие и надежность и ограничивает область применения систем.
Целью изобретения является повыщени:быстродействия и надежности системы.
Эта цель достигается тем, что в .ложенной системе логический блек подкл; чен к блоку сравнения, генератору uxfnvnbсов, блоку ввода программы и через счетчик импульсов к исполш1тельному органу.
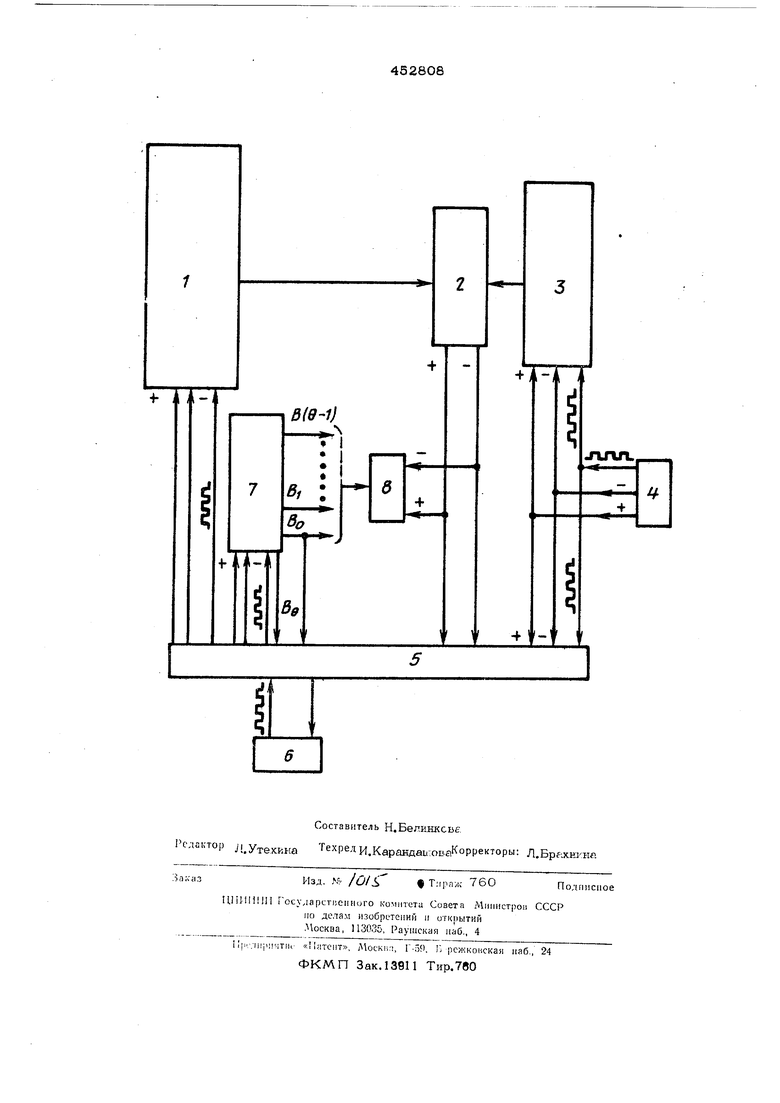
Предлагаемая счетно-импульсная стютема программного управления покаг;31га IK. чертеже. Она состоит из блока 1 ввода, блока 2 сравнения, реверсивного счетчика 3, импульсного датчика 4 перемещения, логического блока 5, генератора 6, счетчика 7 фиксированного числа импульсов и исполнительного органа 8. В качестве блока ввода используется вводное устройство со счетными входами у блоков памяти. Блок 2 сравнения состоит из логических элементов И ИЛИ и НЕ. Выходами (+) и (-) блок 2 сравнения соединен с исполнительным органом 8 и логическим блоком 5. Блок 5 состоит из логических элементов И, ИЛИ и НЕ и связывает блок 2 сравнения, импульсный датчик 4 и генератор 6 с блоком 1 ввода и счетчиком 7 фиксированного числа импульсов. В качестве импульсного датчика 4 пере мещения может быть использован любой известный импульсный датчик со схемой формирования сигналов направления счета. Выходы (+), (-) и счетный выход импульсного датчика связаны с реверсивным счет чиком 8 и схемой 5. Выходы В , В ... В счетчика 7 фиксчрованного числа импульсов связаны с исполнительным органом 8, их число и поряд ковые номера (индексы) определяются свой ствами привода (числом ступеней регулирования, величиной выбега и т. д.). Привод может быть ступенчатым, шаговым, с бесступенчатым регулированием и т. д. Система работает следующим образом. Число X, соответствующее задаваемой координате положения перемещаемого объе кта, запоминается в элементах памяти блока 1 ввода. Блок 2 сравнения сравнивает число X с числом X в реверсивном счетчике, которое соответствует действительной координате перемещаемого объекта. Если Х,- Х , то на выходе (+) блока 2 сравнения появляется единичный сигнал, который поступает на исполнительный орган 8 и включает положительное (на уве личение координаты .Хд направление движения привода. Если X Х единичный сигнал появляется на выходе (-) и включается отрицательное (на уменьшение координаты X ) направление. Таким образом, Д не требуется определять и программировать направление движения привода, что упрощает составление программы и уменьщает ее объем. Единичные сигналы на выходах (+) или (-) блока 2 сравнения включают соответственно счетные входы (-) или (+) блока 1 ввода, после чего на блок 1 ввода подают- ся от генератора 6 импульсы упреждения, которые одновременно суммируются в счетчике 7 фиксированного числа импульсов. Число Q импульсов упреждения соответствует величине упреждения. При появлении числа О в счетчике 7 генератор 6 включается, а в блоке ввода оказывается число, равное Х ± О , Затем включается в работу исполнительный орган. Во время движения перемещаемого объекта от импульсного датчика 4 на реверсивный счетчик 3 поступают сигналы j направления счета и импульсы перемещения. Когда Х X i 0. т. 8. когда число в Да реверсивном счетчике равно числу в блоке ввода, на обоих выходах блока 2 сравнения появляется нулевой сигнал. При этом подается первая команда упреждения на исполнительный орган 8, выходы импульсного датчика 4 подключаются к счетным входам блока 1 ввода и счетчика 7. После этого импульсы перемещения поступают через логический блок 5 на счетные входы блока 1 ввода и счетчика 7. При этом направление счета импульсов перемещения в блоке 1 ввода такое же, как и в реверсивном счетчике 3, а в счетчике 7 они вычитаются. BI-B На выходах 0-2- -2 счетчика 7 поочередно появляются сигналы, число которых равно Q -i. Таким образом , на исполнительный орган 8 можно подать команд упреждения с дискретностью , не большей чем дискретность отсчета координаты положения перемещаемого объекта. Это расширяет область применения системы, повышает быстродействие и надежность ее работы. При этом отсутствует разброс величины упреждения, что уменьшает участок пути около заданной координаты, на котором движение отрабатывается с малой скоростью, и не требуются какие-либо дополнительные переключения в цепях реверсивного счетчика, кроме счета импульсов перемещения. Появление сигнала на выходе В счетчика 7 служит сигналом окончания отработки заданного перемещения (координаты). В этот момент число в блоке ввода равно
8
X I и поступление в него импульсов пере3прекращается
мещения
Если (X - X )
т. е. зада3 Д
ется перемещение меньше величины нормального упреждения, то генератор 6 включается при Л X + А - нулевыми сигД3 налами на обоих выходах блока 2 сравнения, т. е. величина упреждения автоматически уменьшается до С/ . Это упрощает составление программы, так как не требуется никаких дополнительных команд при
(X -X )е.
3 л
6
Предмет изобретения Счетно-импульсная система программного управления, содержащая генератор импульсов, счетчик импульсов и последовательно соединенные датчик перемещения, подключенный к логическому блоку, реверсивный счетчик, блок сравнения, связанный с блоком ввода программы, и исполнительный орган, отличающаяся тем, что, с целью повыщения быстродействия и надежности работы системы, логический блок подключен к блоку сравнения, генератору импульсов, блоку ввода программы и чероз счетчик импульсов к исполнительному органу-;
SO-l)
Tl
jyvx.
-f
| название | год | авторы | номер документа |
|---|---|---|---|
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| СЧЕТНО-ИМПУЛЬСНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1971 |
|
SU309352A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |