(54) ЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1978 |
|
SU766727A1 |
| Захватное устройство | 1975 |
|
SU549311A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Автооператор | 1979 |
|
SU841908A1 |
| Автооператор | 1977 |
|
SU722733A1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| ТЕРМОСТОЙКИЙ ПАКЕР | 2002 |
|
RU2267003C2 |
1
Изобретение относится к области машиностроения, в частности к оборудованию для захвата деталей.
Известно захватное устройство, содержащее смонтированные на основании подпружиненный относительно него корпус с захватами, контактирующий с ними приводной разжимной элемент, и установленные по оси разжимного элемента одна под другой с относительным смещением на часть шага основную и имеющую внутренние сквозные пазы дополнительную кольцевые зубчатые, гребенки, зубья которой выполнены с одинаковым шагом и односторонним скосом, а также шток с закрепленным на нем поворотным кольцевым фиксатором, установленным с возможностью взаимодействия с гребенками l3 .
Однако известное устройство не ожет захватывать тонкую деталь, лежащую на плоской опоре, захватывать детали за неглубокие глухие полости типа выточек и пазов, захватывать деталь за несколько отверстий, осуществлять захват с поднутрением и, следовательно, использоваться для выпрессовки деталей. Кроме того устройство вызывает деформацию залватыг.емой поверхности отверстия детали
и поэтому не применимо для захвата деталей с точно обработанными отверстиями, что ограничивает технологические возможности устройства.
Цель изобретения - обеспечение расгиирения технологических возможностей .
Указанная цель достигается тем, что захватное устройство, содержащее
10 смонтированные на основании подпружиненный относительно него корпус с захватами и контактирующий с ними приводной разжимной элемент, а также установленные по оси разжимного эле15мента одна под другой и смещенные одна относительно другой на часть шага основную и имеющую внутренние сквозные пазы дополнительную кольцевые зубчатые гребенки, зубья которых
20 выполнены с одинаковым шагом и односторонним скосом, и шток с закрепленным на нем поворотным кольцевым фиксатором, при этом фиксатор установлен с возможностью взаимодействия с гребенками, снабжено гильзой с
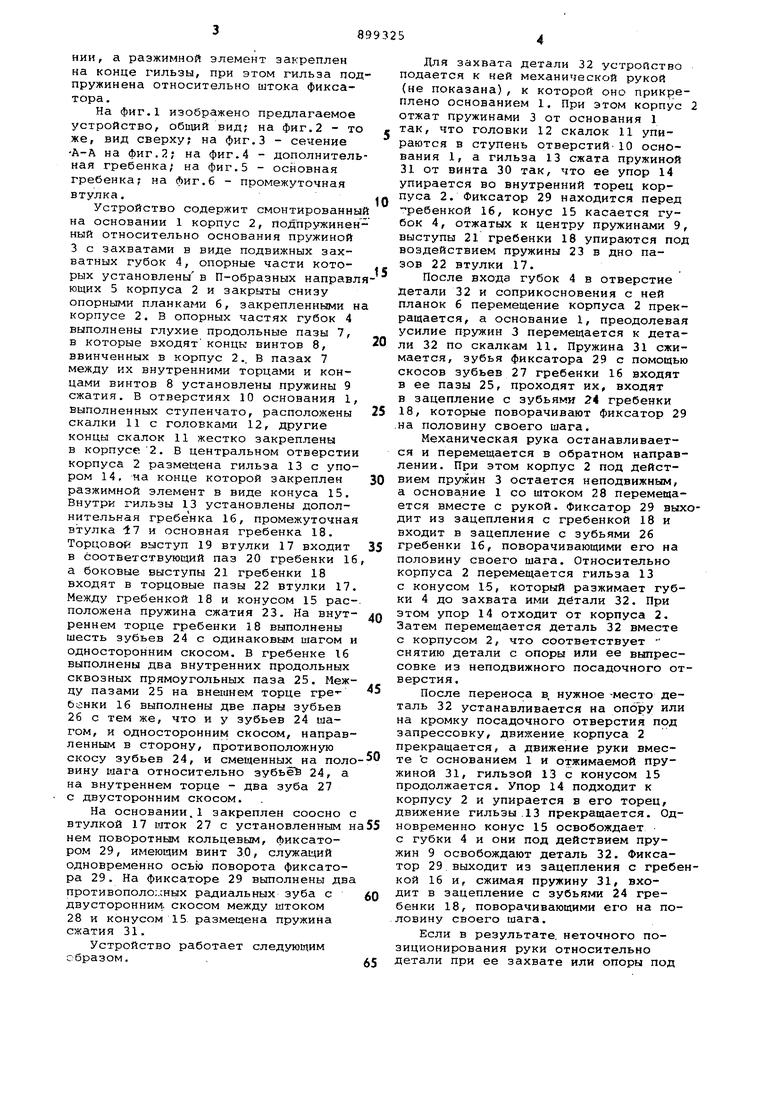
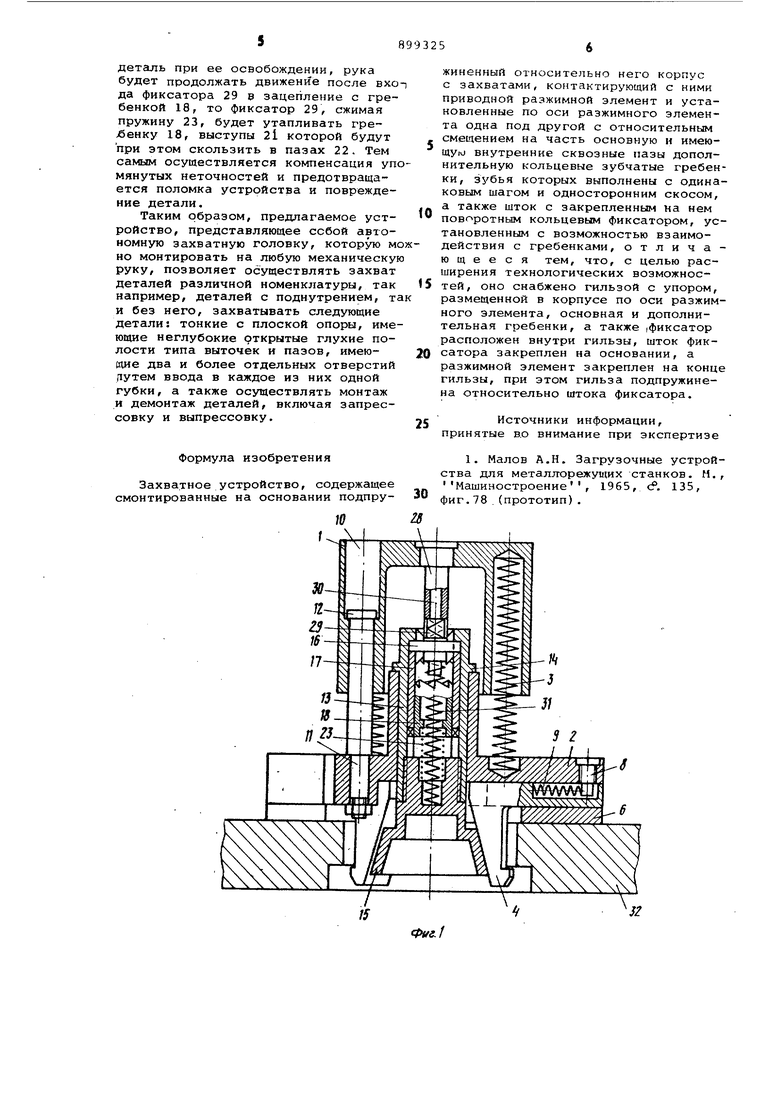
25 упором, размещенной в корпусе по оси разжимного элемента, основная и дополнительная гребенки, а также фиксатор расположены внутри гильзы, шток фиксатора закреплен на основа30НИИ, а разжимной элемент закреплен на конце гильзы, при этом гильза под пружинена относительно штока фиксатора. На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - сечение А-А на фиг.2; на фиг.4 - дополнитель ная гребенка; на фиг,5 - основная гребенка; на фиг.б - промежуточная втулка. Устройство содержит смонтированны на основании 1 корпус 2, Подпружинен ный относительно основания пружиной 3 с захватами в виде подвижных захватных губок 4, опорные части которых установлены в П-образных направл ющих 5 корпуса 2 и закрыты снизу опорными планками 6, закрепленными н корпусе 2. В опорных частях губок 4 выполнены глухие продольные пазы 7, в которые входят концы винтов 8, ввинченных в корпус 2.. В пазах 7 между их внутренними торцами и концами винтов 8 установлены пружины 9 сжатия, в отверстиях 10 основания 1 выполненных ступенчато, расположены скалки 11 с головками 12, другие концы скалок 11 жестко закреплены в корпусе 2. В центральном отверстии корпуса 2 размещена гильза 13 с упором 14, на конце которой закреплен разжимной элемент в виде конуса 15. Внутри гильзы 13 установлены дополнительная гребе нка 16, промежуточная втулка 17 и основная гребенка 18. Торцовой выступ 19 втулки 17 входит в соответствующий паз 20 гребенки 16 а боковые выступы 21 гребенки 18 входят в торцовые пазы 22 втулки 17 Между гребенкой 18 и конусом 15 расположена пружина сжатия 23. На внутрением торце гребенки 18 выполнены шесть зубьев 24 с одинаковым шагом и односторонним скосом. В гребенке 16 выполнены два внутренних продольных сквозных прямоугольных паза 25. Меж ду пазами 25 на внешнем торце грвбйнки 16 выполнены две пары зубьев 26 с тем же, что и у зубьев 24 шагом, и односторонни / СКОСОМ, направленным в сторону, противоположную скосу зубьев 24, и смещенных на поло вину шага относительно зубьев 24, а на внутреннем торце - два зуба 27 с двусторонним скосом. На основании.1 закреплен соосно втулкой 17 шток 27 с установленным нем поворотным кольцевым, фиксатором 29, имеющим винт 30, служащий одновременно осью поворота фиксатора 29, На фиксаторе 29 выполнены дв противополо;.сных радиальных зуба с двусторонним, скосом между штоком 28 и конусом 15 размещена пружина сжатия 31. Устройство работает следующим образом, , Для захвата детали 32 устройство подается к ней механической рукой (не показана), к которой оно прикреплено основанием 1. При этом корпус 2 отжат пружинами 3 от основания 1 так, что головки 12 скалок 11 упираются в ступень отверстий10 основания 1, а гильза 13 сжата пружиной 31 от винта 30 так, что ее упор 14 упирается во внутренний торец корпуса 2. Фиксатор 29 находится перед ребенкой 16, конус 15 касается губок 4, отжатых к центру пружинами 9, выступы 21 гребенки 18 упираются под воздействием пружины 23 в дно пазов 22 втулки 17. После входа губок 4 в отверстие Детали 32 и соприкосновения с ней планок 6 перемещение корпуса 2 прекращается, а основание 1, преодолевая усилие пружин 3 перемещается к детали 32 по скалкам 11. Пружина 31 сжимается, зубья фиксатора 29 с помощью скосов зубьев 27 гребенки 16 входят в ее пазы 25, проходят их, входят в зацепление с зубьями 24 гребенки 18, которые поворачивают фиксатор 29 на половину своего шага. Механическая рука останавливается и перемещается в обратном направлении. При этом корпус 2 под действием пружин 3 остается неподвижным, а основание 1 со штоком 28 перемещается вместе с рукой. Фиксатор 29 выходит из зацепления с гребенкой 18 и входит в зацепление с зубьями 26 гребенки 16, поворачивающими его на половину своего шага. Относительно корпуса 2 перемещается гильза 13 с конусом 15, который разжимает губки 4 до захвата ими Детали 32. При этом упор 14 отходит от корпуса 2. Затем перемещается деталь 32 вместе с корпусом 2, что соответствует снятию детали с опоры или ее выпрессовке из неподвижного посадочного отверстия. После переноса в, нужное -место деталь 32 устанавливается на опору или на кромку посадочного отверстия под запрессовку, движение корпуса 2 прекращается, а движение руки вместе с основанием 1 и отжимаемой пружиной 31, гильзой 13 с конусом 15 продолжается. Упор 14 подходит к корпусу 2 и упирается в его торец, движение гильзы .13 прекращается. Одновременно конус 15 освобождает с губки 4 и они под действием пружин 9 освобождают деталь 32. Фиксатор 29 выходит из зацепления с гребенкой 16 и, сжимая пружину 31, входит в зацепление с зубьями 24 гребенки 18, поворачивающими его на половину своего шага. Если в результате, неточного позиционирования руки относительно детали при ее захвате или опоры под деталь при ее освобождении, рука будет продолжать движение после вхо да фиксатора 29 р зацепление с гребенкой 18, то фиксатор 29, сжимая пружину 23, будет утапливать гре;бенку 18, выступы 21 которой будут при этом скользить в пазах 22. Тем самым осуществляется компенсация уп мянутых неточностей и предотвращается поломка устройства и повреждение детали. Таким образом, предлагаемое устройство, представляющее собой автономную захватную головку, которую м но монтировать на любую механическу руку, позволяет осуществлять захват деталей различной номенклатуры, так например, деталей с поднутрением, т и без него, захватывать следующие детали: тонкие с плоской опоры, име ющие неглубокие открытые глухие полости типа выточек и пазов, имею(Пие два и более отдельных отверстий дутем ввода в каждое из них одной губки, а также осуществлять монтаж и демонтаж деталей, включая запрессовку и выпрессовку. Формула изобретения Захватное устройство, содержащее смонтированные на основании подпруГжикенный относительно него корпус с захватами, контактирующий с ними приводной разжимной элемент и установленные по оси разжимного злемента одна под другой с относительным смещением на часть основную и имеющую внутренние сквозные пазы дополнительную кольцевые зубчатые гребенки, зубья которых выполнены с одинаковым шагом и односторонним скосом, а также шток с закрепленным на нем поворотным кольцевЕлм фиксатором, установленным с возможностью взаимодействия с гребенками, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено гильзой с упором, размещенной в корпусе по оси разжимного элемента, основная и дополнительная гребенки, а также (фиксатор расположен внутри гильзы, шток фиксатора закреплен на основании, а разжимной элемент закреплен на конце гильзы, при этом гильза подпружинена относительно штока фиксатора. Источники информации, принятые в.о внимание при экспертизе 1. Малов А,Н. Загрузочные устройства для металлорежущих станков, Н., Машиностроение, 1965, с, 135, фиг.78 . (прототип).
U I , I
WiU
iit.S
Й-/9
-a
Фиг-б
