3 1
зажатия детали 30 центральный стержень 23 останавливается, при дальнейшем перемещении основания 7 зубья фиксатора 25 выходят из зацепления с зубьями полумуфты 13 и входят в контакт с зубьями полумуфты 12, которые поворачивают фиксатор 25. При перемещении основания 7 в обратном направлении зубья фиксатора 25 выхо357164
дят из зацепления с зубьями полумуф- ты 12 и входят в зацепление с зубьями полумуфты 13, которые поворачивают фиксатор. При подаче детали в зону разгрузки ход фиксатора увеличивается за счет пазов в полумуфте 13 и тем самым центральный стержень 23 отходит от зажимных губок 3, обеспечи- 10 вая их раскрытие. 10 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1980 |
|
SU899325A1 |
| Автооператор | 1979 |
|
SU841908A1 |
| Автооператор | 1977 |
|
SU722733A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Устройство для подачи листового материала в рабочую зону пресса | 1979 |
|
SU871934A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Подающее устройство | 1983 |
|
SU1159756A1 |
| Устройство для навинчивания соединительных деталей трубопроводов | 1982 |
|
SU1073065A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |

Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов. Целью изобретения является сокращение габаритов и материалоемкости. При соприкосновении упоров 27 с неподвижным элементом корпус 1 останавливается. Основание 7 продолжает перемещение. Клиновые поверхности центрального стержня 23 сводят зажимные губки 3, захватывая деталь 30. После зажатия детали 30 центральный стержень 23 останавливается, при дальнейшем перемещении основания 7 зубья фиксатора 25 выходят из зацепления с зубьями полумуфты 13 и входят в контакт с зубьями полумуфты 12, которые поворачивают фиксатор 25. При перемещении основания 7 в обратном направлении зубья фиксатора 25 выходят из зацепления с зубьями полумуфты 12 и входят в зацепление с зубьями полумуфты 13, которые поворачивают фиксатор. При подаче детали в зону разгрузки ход фиксатора увеличивается за счет пазов в полумуфте 13 и тем самым центральный стержень 23 отходит от зажимных губок 3, обеспечивая их раскрытие. 10 ил.
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, обслуживающих кузнечно-прессовое и сборочное оборудование, а также металлорежущие станки.
Целью изобретения является сокращение габаритов и материалоемкости.
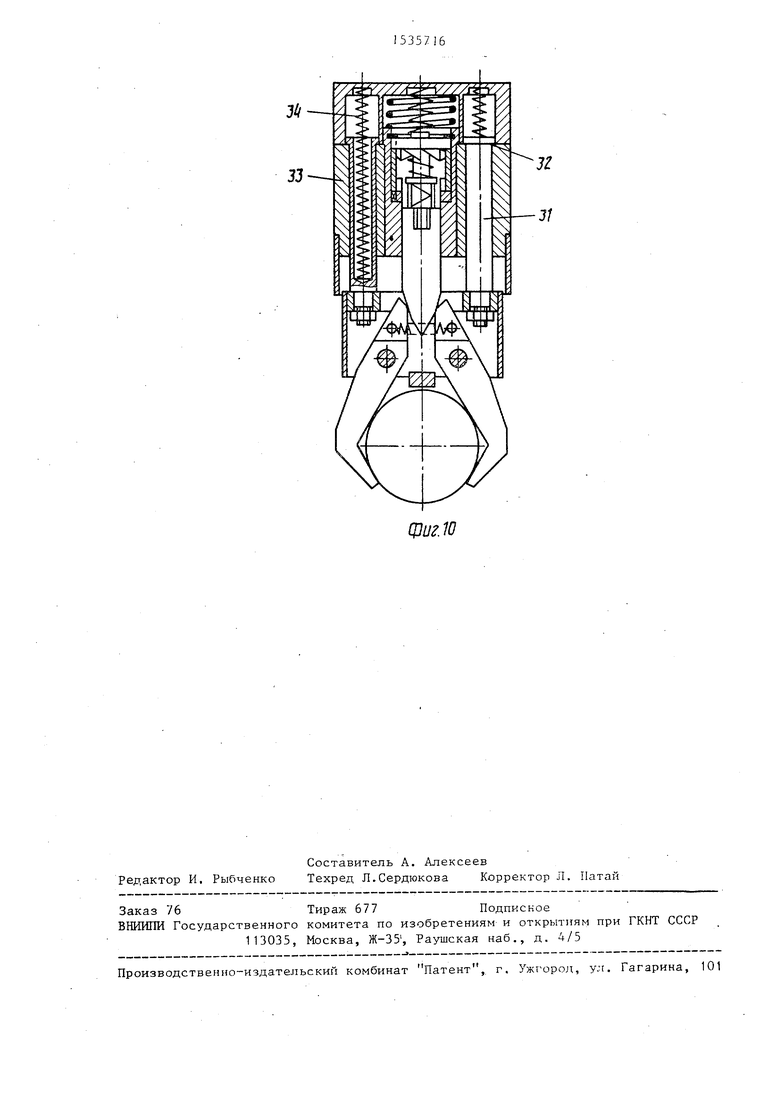
На фиг. 1 представлено захватное устройство, продольный разрез; на фиг. 2 - разрез А--А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - передняя полумуфта, вид сбоку; на фиг. 5 - то же, вид спереди; на фиг. 6 - задняя полумуфта, вид спереди; на фиг. 7 - то же, вид сбоку; на фиг. 8 - промежуточная втулка, разрез; на фиг. 9 - втулка, вид сзади; на фиг. 10 - захватное устройство, вариант, разрез.
Захватное устроГ- тво содержит корпус 1, на осях 2 которого установлены поворотные зажимные губки 3, стянутые пружиной 4. На корпусе 1 закреплены скалки 5 с упорами 6. Скалки 5 проходят через отверстия основания 7. Между корпусом 1 и основанием 7 установлены пружины 8. В центральном отверстии основания 7 подвижно установлена втулка 9 с упором 10, поджатая вперед пружиной 11. Во втулке 9 закреплены полумуфты 12 и 13. На переднем торце полумуфты 12 выполнены шесть зубьев 14 с одинаковым шагом и односторонним скосом, направленным вершинами к полумуфте 13. На заднем торце полумуфты 13 выполнены четыре попарно расположенных зуба 15с тем же, что и у зубьев 14, шагом и односторонним скосом, направленным в сторону, противоположную скобу зубьев 14 Зубья 15 направлены вершинами к полумуфте 12 и смещены на половину шага относительно зубьев 14. Между пара5
0
5
0
5
0
5
0
5
ми зубьев 15 полумуфты 13 выполнены два сквозных паза 16, параллельных оси полумуфты 13. Внутри втулки 9 выполнены пазы 17, профиль которых соответствует профилю пазов 16 полумуфты 1 3.
Внутри втулки 9 между полумуфтами 12 и 13 установлена втулка 18, которая входит своими выступами 19 и 20 в пазы 21 и 22 полумуфт 12 и 13. Таким образом, втулка 18 определяет смещение зубьев 14 и 15 на половину шага, В переднем конце втулки 9 установлен подвижный стержень 23, имеющий на переднем конце клиновые поверхности, взаимодействующие с задними концами губок 3. На другом конце стержня 23 на оси 24 установлен поворотный фиксатор 25, имеющий два зуба 26 с двусторонним скосом. Скалки 5 имеют на задних концах упоры 27. На корпусе 1 закреплен упор 28. Стержень 23 поджат пружиной 29.
Устройство работает следующим образом.
В исходном положении губки 3 зафиксированы механизмом фиксации в разжатом положении, зубья 26 фиксатора находятся в зацеплении с зубьями 15 полумуфты 13.
Для захвата детали 30, установленной на опоре или в центрах станка, захватное устройство подают к ней известным приводом, например штоком силового цилиндра, к которому прикреплено основание 7.
При соприкосновении упоров 27 с элементом привода, например с крышкой силового цилиндра, перемещение корпуса 1 прекращается, а основание 7, преодолевая усилие пружин 8, вместе с втулкой 9, полумуфтами 12 и 13, фик- сатором 25 и стержнем 23 продолжает перемещаться к детали 30. Стержень
3, поджатый пружиной 29, воздейст- вует клиновыми поверхностями на задние концы губок 3 и разводит их до тех пор, пока их передние концы не захватят деталь 30. Основание 7 продолжает перемещение к детали 30. При этом зубья 26 фиксатора 25 выходят из зацепления с зубьями 15 полумуфты
Ксли дет.пь 30 расположена бли.кс расчетного .расстояния по отношении к захватному устройству в результате, g например, неточности монтажа оборудования, на котором она базируется, движение корпуса 1 к детали 30 останавливает упор 28 при контакте с ней. Фиксатор 25 после поворота на поло13 и входят в контакт с зубьями 14 по-|0 вину шага зубьев 14 полумуфты 12 лумуфты 12, которые поворачивают фик- и зацепления с ними останавливает перемещение втулки 9 к детали 30. Основание 7 продолжает перемещение к детали 30 благодаря тому, что втулка
15 выполнена подвижной относительно основания 7, и сжимает пружину 11, тем самым компенсируя неточность монтажа.
При захвате ступенчатой детали за ступень большего диаметра, если де20 таль неправильно ориентирована, т.е. повернута на 180 и зажимные губки находятся в зоне ступени меньшего диаметра, клиновые поверхности стержня 23 разводлт задние концы зажимных
25 губок 3 на большую величину, чем положено, а их передние концы сходятся, не встречая сопротивления, фиксатор 25 не выходит из зацепления с зубьями 15 полумуфты 13.
30 При обратном перемещении зажимные губки 3 раскрываются, не захватив детали, и устройство уходит от нее с зафиксированными в раскрытом положении зажимными губками. Тем самым
35 обеспечивается избирательность при захвате детали.
Согласно второму варианту исполнения устройства на задних концах скалок 31 выполнены упоры 32, которые 40 не выходят из основания 33, а корпус подпружинен относительно основания 33 пружинами 34, установленными, в частности, внутри скалок 31. Захватное устройство является автономным 45 и может прикрепляться основанием к любой механической руке. При работе схвата упоры 32 выполняют ту же функцию, что и упоры 6 по первому варианту.
сатор 25 на половину своего шага.
Прекращают перемещение основания 7 вперед и начинают его перемещение назад. Корпус 1 остается неподвижным под действием усилия пружин 8, при этом зубья 26 фиксатора 25 выходят из зацепления с зубьями 14 полумуфты 12 и входят в контакт с зубьями 15 полумуфты 13, которые поворачивают фиксатор на полтора своих шага, после чего зубья 26 фиксатора 25 оказываются в пазах 16 полумуфты 13, перемещаются в них и в пазах 17 втулки 9 до тех пор, пока основание 7 не войдет в контакт с упорами 6 скалок 5. После этого начинается перемещение всего устройства вместе с захваченной деталью 30.
После переноса детали 30 в нужное место, например на линию центров станка или на опору, упоры 27 останавливают перемещение корпуса 1 , а основание 7 продолжает перемещение к детали 30.
Фиксатор 25 перемещается в пазах 17 и 16, проходит через них и входит в контакт с зубьями 14 полумуфты 12, которые поворачивают его на половину своего шага. Движени основания 7 прекращают, и оно отходит от детали 30. При этом корпус 1 остается неподвижным, основание 7 перемещается относительно корпуса 1, фиксатор 25 выходит из зацепления с зубьями 14 полумуфты 12 и входит в контакт с зубьями 15 полумуфты 13, которые поворачивают его на половину своего шага, и он входит с ними с зацепле- 50 ние. Относительно корпуса 1 начинает перемещаться стержень 23. Задние концы захватных губок 3 сходятся, а наружные освобождают деталь 30. ПоФормула изобретения
Захватное устройство, содержащее основание с приводом его перемещения, корпусс упором и зажимными губками, еле касания основания 7 упоров 6 ска- 55 установленный с возможностью осевого лок 5 начиняется перемещение всего перемещения относительно основания и устройства с зафиксированными в подпружиненный относительно послед- открытом положении зажимными губка- него, и механизм фиксации, включаю- ми.щий две зубчатые полумуфты и размеКсли дет.пь 30 расположена бли.кс расчетного .расстояния по отношении к захватному устройству в результате, например, неточности монтажа оборудования, на котором она базируется, движение корпуса 1 к детали 30 останавливает упор 28 при контакте с ней. Фиксатор 25 после поворота на половину шага зубьев 14 полумуфты 12 и зацепления с ними останавливает перемещение втулки 9 к детали 30. Основание 7 продолжает перемещение к детали 30 благодаря тому, что втулка
Фие.2
jj-12
111
фиг. 5
ФигЛ
5-6
Фи&З
18ери г. 9
фиг. 10
| Автооператор | 1977 |
|
SU722733A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Целью изобретения является сокращение габаритов и материалоемкости | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
