(54) ЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1975 |
|
SU549311A1 |
| Захватное устройство | 1980 |
|
SU899325A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Автооператор | 1977 |
|
SU722733A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Автооператор | 1979 |
|
SU841908A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1973 |
|
SU381498A1 |
| Устройство для подачи деталей | 1988 |
|
SU1569180A1 |
| Захватное устройство | 1986 |
|
SU1393627A1 |
i
Изобретение относится к области вспомогательного производства кузнечно-прессовых цехов машиностроительных заводов, а именно к устройствам для манипулирования заготовками в процессе их обработки.
Известно захватное устройство, содержащее основание и подпружиненный относительно него корпус со смонтированным в нем захватом, механизм фиксации захвата, содержащий втулку, смонтированную на основании, и размещенные во втулке и смещенные друг относительно друга на часть щага основную, подвижную и подпружиненную относительно основания и дополнительную кольцевые круговые зубчатые гребенки, зубья которых выполнены с одинаковым щагом и односторонним скосом, а также поворотный фиксатор, выполненный с двумя зубьями двустороннего скоса и установленный на щтоке, смонтированном на корпусе 1.
Недостатком известного захватного устройства является невозможность захвата неточно ориентированных деталей, что снижает производительность работы устройства.
С целью повыщения производи1;ельности, поворотный фиксатор механизма фиксации установлен подвижно относительно штока и подпружинен относительно корпуса в сторону основной гребенки.
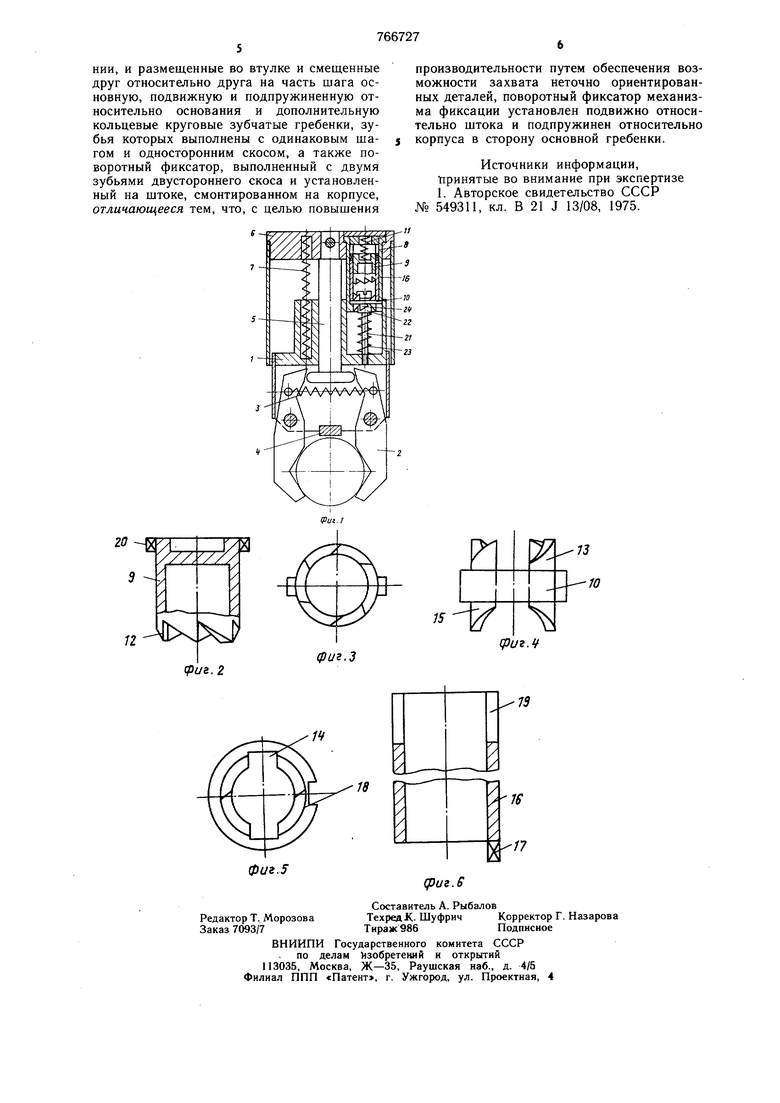
На фиг. 1 изображено устройство, разрез; на фиг. 2 - основная гребенка, общий вид; на фиг. 3 - то же, вид сверху; на фиг. 4 - дополнительная гребенка, общий вид; на фиг. 5 -то же, вид сверху; на фиг. 6 - промежуточная втулка.
10 Захватное устройство содержит корпус 1 с захватом 2. Концы захвата 2, размещенные внутри корпуса 1, стянуты пружиной 3. На корпусе 1 закреплен упор 4. Через центральное отверстие корпуса 1 проходит подвижный шток 5, закрепленный на
основании 6.
Конец штока 5 в виде диска взаимодействует со скосами внутренних концов рычагов захвата 2. Корпус 1 подпружинен относительно основания 6 пружинами 7. Меха2Q низм фиксации размещен между корпусом 1 и основанием 6, на котором закреплена втулка 8 механизма фиксации.
Ось втулки 8 параллельна оси щтока 5. Внутри втулки 8 перпендикулярно к ее оси подвижно смонтирована основная кольцевая круговая зубчатая гребенка 9 и неподвижная в осевом направлении дополнительная круговая зубчатая гребенка 10. Между гребенкой 9 и основанием 6 установлена пружина 11 сжатия. С одной стороны гребенки 9 выполнены шесть зубьев 12 с одинаковым шагом и односторонним скосом. Вершины этих зубьев направлены в сторону гребенки 10. С одной стороны гребенки 10 выполнены четыре попарно расположенных зуба 13 с тем же, что и у зубьев 12 шагом и односторонним скосом, направленным в сторону, противоположную скосу зубьев 12. Вершины этих зубьев направлены в сторону гребенки 9 и смещены на половину шага относительно зубьев 12. Между парами зубьев 13 гребенки 10 выполнены два сквозных прямоугольных паза 14, параллельных оси гребенки 10. С другой стороны гребенки 10 между пазами 14 выполнены два зуба 15 с двусторонним скосом. Внутри втулки 8, неподвижно установлена промежуточная втулка 16, которая входит своим выступом 17 в паз 18 гребенкк 10. В пазы 19 втулки 16 входят выступы 20 гребенки 9. Таким образом втулка 16 определяет минимальное расстояние между гребенками 9 и 10 и смещение их зубьев на половину шага. На корпусе 1 закреплен соосно с втулкой 8 шток 21 механизма фиксации, на котором установлен поворотный фиксатор 22. На фиксаторе 22, подпружиненном пружиной 23 в сторону гребенки 9, выполнены два противоположных радиальных зуба 24 с двусторонним скосом. Пружина 23 имеет натяг, не препятствующр й повороту фиксатора 22, и выполнена более жесткой, чем пружина 11 после полного сжатия. Для захвата детали устройство подается к ней механической рукой (на чертеже не показана), к которой оно прикреплено основанием 6. При этом наружные концы рычагов захвата 2 находятся в разжатом положении, зафиксированном механизмом фиксации. При соприкосновении упора 4 с деталью перемещение корпуса 1 прекращается, а основание 6, преодолевая усилие пружин 7, продолжает перемещаться к детали. При этом зубья 24 фиксатора 22 выходят из зацепления с зубьями 13 гребенки 10 и входят в контакт с зубьями 12 гребенки 9, которые заставляют фиксатор 22 поворачиваться на половину своего шага. Механическая рука останавливается и начинает перемещаться в обратном направлении. При этом корпус остается неподвижным под действием пружин 7, а основание 6 с щтоком 5 перемещается вместе с рукой. В это время фиксатор 22 выходит из зацепления с зубьями 12 гребенки 9 и входит в контакт с зубьями 13 гребенки 10, которые заставляют фиксатор 22 повернуться на полтора шага зубьев 13 гребенки 10, после чего зубья 24 фиксатора 22 оказываются в 7 7 пазах 14 гребенки 10 и перемещаются в них до окончания захвата детали и начала перемещения корпуса I. Диск щтока 5 воздействует на скосы внутренних концов рычагов захвата 2, заставляя их поворачиваться и захватывать деталь. После захвата корпус 1 вместе с захваченной деталью перемещается вместе с рукой. После переноса в нужное место деталь устанавливается на опору, при этом упор 4 останавливает движение корпуса 1, а основание 6 продолжает движение к детали вместе с штоком 5. Под действием пружины 3 внутренние концы рычагов захвата 2 сближаются, а наружные разжимаются. Фиксатор 22 входит в пазы 14 гребенки 10, проходит через них и входит в контакт с зубьями 12 гребенки 9, которые поворачивают его на половину своего шага. Движение руки прекращается и она отходит от детали. Основание 6 движется вместе с рукой, а корпус 1 остается неподвижным до тех пор, пока фиксатор 22, выйдя из зацепления с зубьями 12 гребенки 9 и войдя в контакт с зубьями 13 гребенки 10, не повернется на половину их шага и войдет с ними в зацепление, что соответствует фиксации разжатого положения рычагов захвата 2. После этого начинает перемещаться корпус 1. В случае поворота фиксатора 22 относительно пазов 14 гребенки 10 после выхода из них при захватывании детали фиксатор 22 снова попадает в них с помощью скосов зубьев 15 гребенки 10. Если упор 4 соприкасается с деталью раньще расчетного момента в результате, например, неточности монтажа оборудования, на котором базируется деталь, фиксатор 22 после поворота на половину шага зубьев 12 гребенки 9 и зацепления с ними останавливает перемещение гребенки 9 к детали, а когда гребенка 9 перемещается до упора, фиксатор 22 начинает перемещаться вдоль щтока 21 в направлении корпуса 1. Основание же 6 продолжает перемещаться к детали благодаря тому, что гребенка 9 выполнена подвижной относительно втулки 8 и подпружиненной относительно основания 6, а фиксатор 22 - подвижным относительно штока 21 и подпружиненным в сторону гребенки 9. Тем самым осуществляется компенсация неточностей. Описанная конструкция позволяет повысить производительность работы захватного устройства. Формула изобретения Захватное устройство, содержащее основание и подпружиненный относительно него корпус со смонтированным в нем захватом, механизм фиксации захвата, содержащий втулку, смонтированную на основаНИИ, и размещенные во втулке и смещенные друг относительно друга на часть шага основную, подвижную и подпружиненную относительно основания и дополнительную кольцевые круговые зубчатые гребенки, зубья которых выполнены с одинаковым щагом и односторонним скосом, а также поворотный фиксатор, выполненный с двумя зубьями двустороннего скоса и установленный на штоке, смонтированном на корпусе, отличающееся тем, что, с целью повышения
производительности путем обеспечения возможности захвата неточно ориентированных деталей, поворотный фиксатор механизма фиксации установлен подвижно относительно щтока и подпружинен относительно корпуса в сторону основной гребенки.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 549311, кл. В 21 J 13/08, 1975.
;5
