(54) АВТОМАТИЧЕСКИЙ ЗАХВАТ И. В. ИЛЫКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический клещевой захват для штучных грузов | 1980 |
|
SU874573A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Клещевой захват для штучных грузов | 1978 |
|
SU785174A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Клещевой захват | 1980 |
|
SU910525A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1203004A1 |
| Захват | 1984 |
|
SU1283210A1 |
| Многосопловая фурма для продувки металла | 1987 |
|
SU1440934A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |
1
Изобретение относится к подъемнотранспортной технике, а именно к механическим грузозахватным устройствам, и может быть использовано во всех отраслях народного хозяйства для транспортирования штучных грузов, например балок круглого, многогранного, двухтаврового, швеллерного и других сечений.
Известен автоматический захват, содержаший шарнирно соединенные между собой, клешевины, шарнирно соединенные с последними тяги, навешиваемые на грузоподъемное средство посредством серьги, и фиксатор для удержания клещевин в раскрытом положении, выполненный в виде установленной на осях шарниров, соединяющих клешевины и тяги, защелки со скосами и пазами для взаимодействия с одной из осей шарниров 1.
Недостатком таких захватов является то, что они не обеспечивают надежного захвата штучных грузов различных типоразмеров и видов сечения, например листового материала, балок (круглого, многогранного, таврового, швеллерного и других видов сечения), а также пакетов вышеперечисленных штучных грузов.
Цель изобретения - повышение надежности работы захвата.
Поставленная цель достигается тем, что фиксатор снабжен размешенными с одной стороны зашелки пластиной и ползуном, установленными с возможностью перемешения вдоль защелки, и расположенными на ней пальцами, при этом в пластине и ползуне выполнены пазы и вырезы для взаимодействия с одной из осей шарниров и пальцами.
10
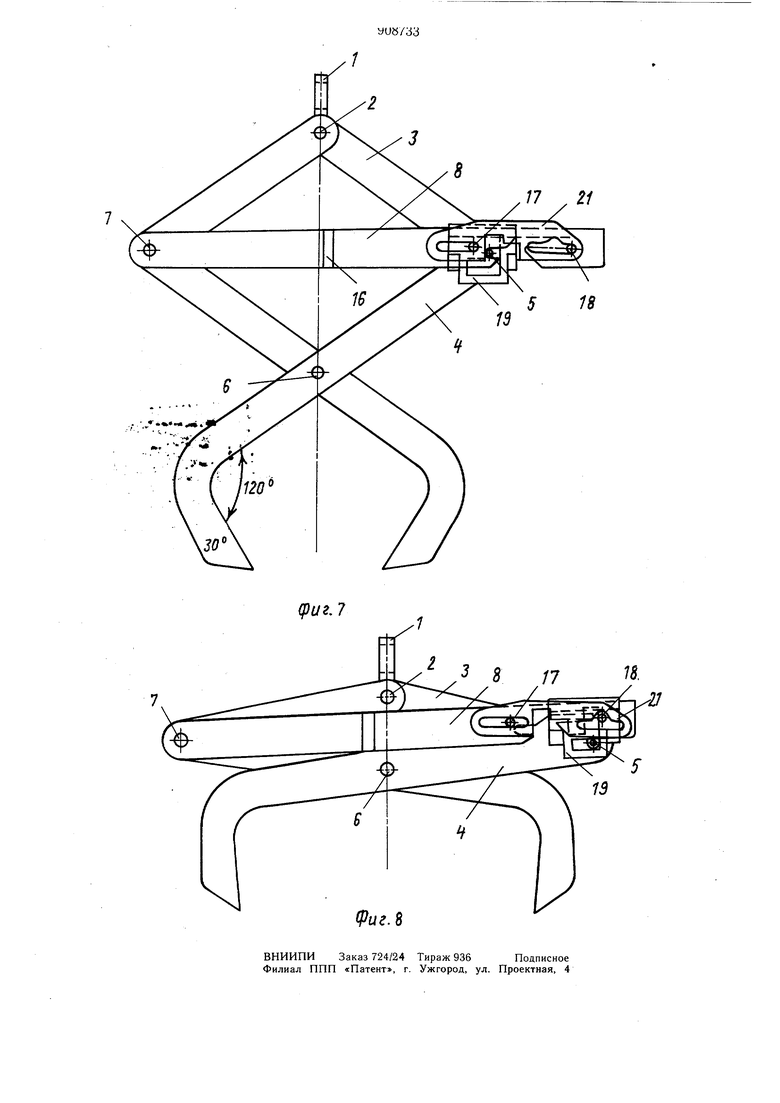
Кроме того, внутренняя поверхность клещевин изогнута под углом 120°, а угол между нижней внутренней поверхностью каждой клешевины и ее нижней наружной
15 поверхностью равен 30°.
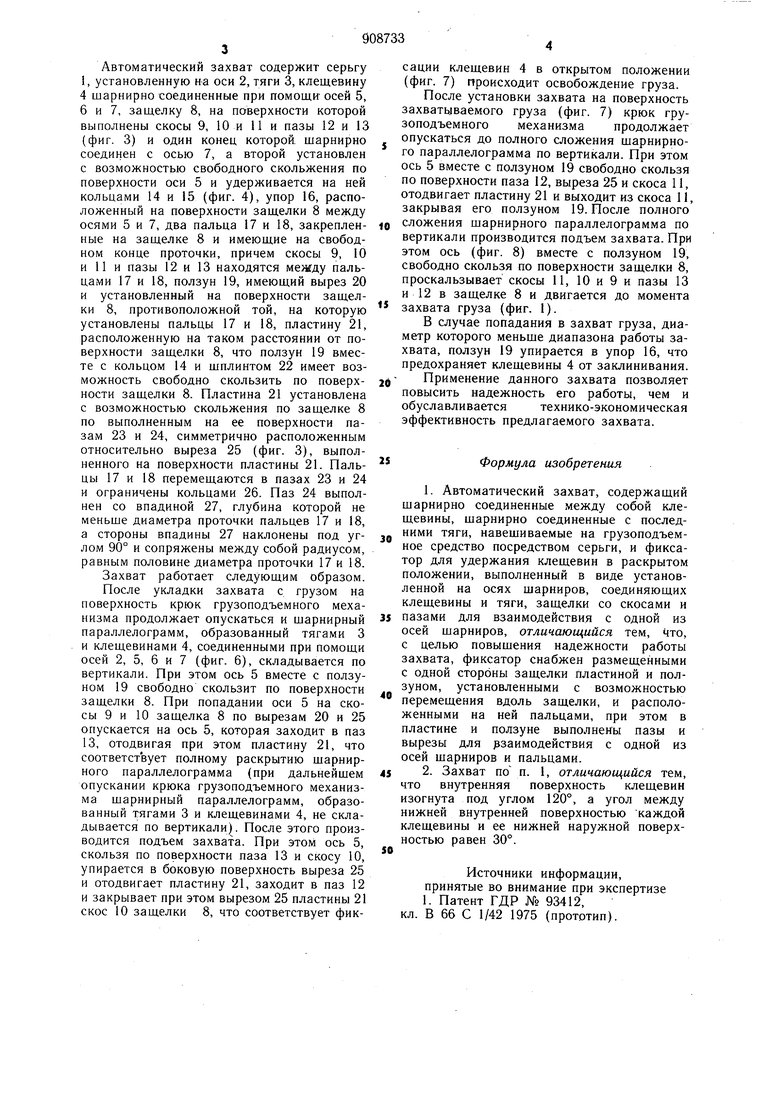
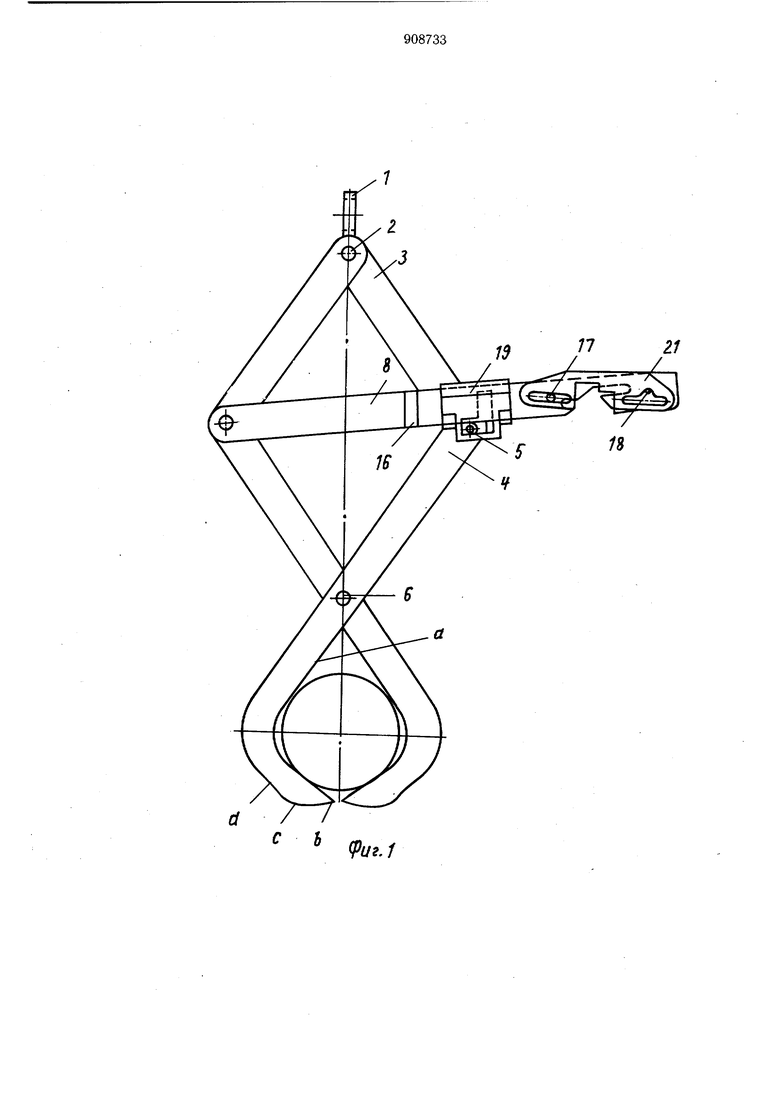
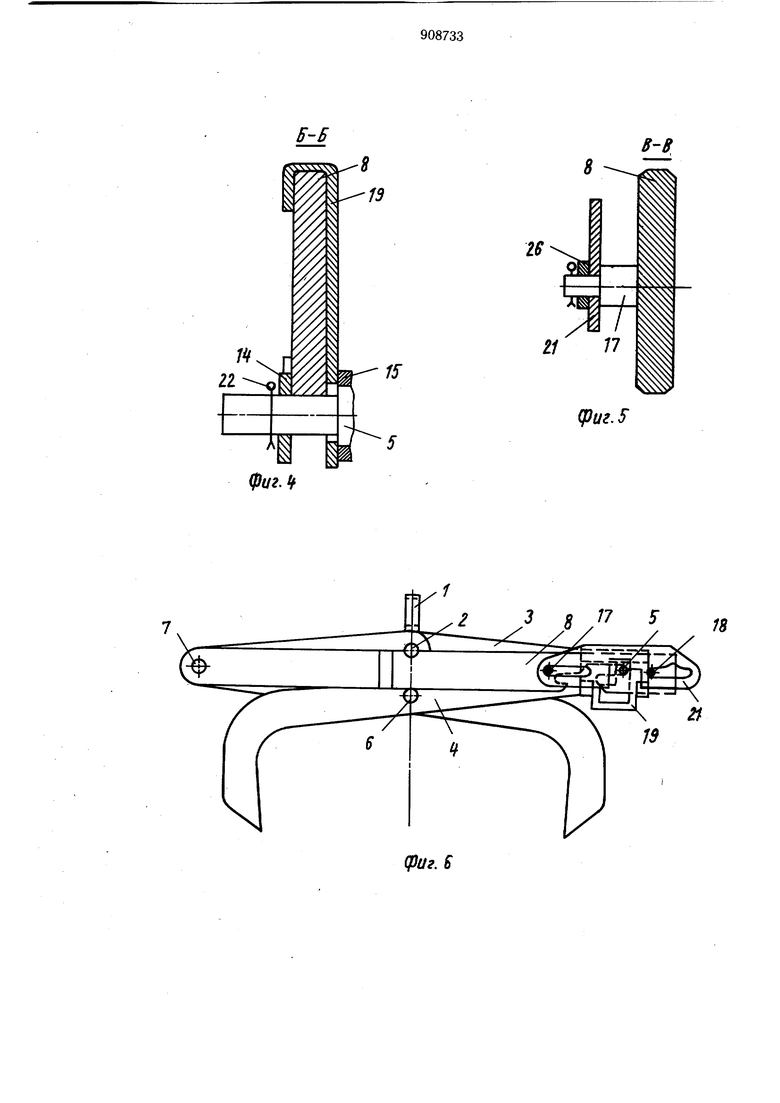
На фиг. Г изображен автоматический захват, обший вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2;
2Q на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - захват, общий вид; в момент полного раскрытия клещевин; на фиг. 7 - положение захвата перед захватом груза; на фиг. 8 - захват, общий вид; в раскрытом положении. Автоматический захват содержит серьгу 1, установленную на оси 2, тяги 3, клещевину 4 шарнирно соединенные при помощи осей 5, 6 и 7, защелку 8, на поверхности которой выполнены скосы 9, 10 и 11 и пазы 12 и 13 (фиг. 3) и один конец которой, шарнирно соединен с осью 7, а второй установлен с возможностью свободного скольжения по поверхности оси 5 и удерживается на ней кольцами 14 и 15 (фиг. 4), упор 16, расположенный на поверхности защелки 8 между осями 5 и 7, два пальца 17 и 18, закрепленные на защелке 8 и имеющие на свободном конце проточки, причем скосы 9, 10 и 11 и пазы 12 и 13 находятся между пальцами 17 и 18, ползун 19, имеющий вырез 20 и установленный на поверхности защелки 8, противоположной той, на которую установлены пальцы 17 и 18, пластину 21, расположенную на таком расстоянии от поверхности защелки 8, что ползун 19 вместе с кольцом 14 и шплинтом 22 имеет возможность свободно скользить по поверхности защелки 8. Пластина 21 установлена с возможностью скольжения по защелке 8 по выполненным на ее поверхности пазам 23 и 24, симметрично расположенным относительно выреза 25 (фиг. 3), выполненного на поверхности пластины 21. Пальцы 17 и 18 перемещаются в пазах 23 и 24 и ограничены кольцами 26. Паз 24 выполнен со впадиной 27, глубина которой не меньше диаметра проточки пальцев 17 и 18, а стороны впадины 27 наклонены под углом 90° и сопряжены между собой радиусом, равным половине диаметра проточки 17 и 18. Захват работает следующим образом. После укладки захвата с грузом на поверхность крюк грузоподъемного механизма продолжает опускаться и шарнирный параллелограмм, образованный тягами 3 и клещевинами 4, соединенными при помощи осей 2, 5, 6 и 7 (фиг. 6), складывается по вертикали. При этом ось 5 вместе с ползуном 19 свободно скользит по поверхности защелки 8. При попадании оси 5 на скосы 9 и 10 защелка 8 по вырезам 20 и 25 опускается на ось 5, которая заходит в паз 13, отодвигая при этом пластину 21, что соответствует полному раскрытию шарнирного параллелограмма (при дальнейшем опускании крюка грузоподъемного механизма шарнирный параллелограмм, образованный тягами 3 и клещевинами 4, не складывается по вертикали). После этого производится подъем захвата. При этом ось 5, скользя по поверхности паза 13 и скосу 10, упирается в боковую поверхность выреза 25 и отодвигает пластину 21, заходит в паз 12 и закрывает при этом вырезом 25 пластины 21 скос 10 защелки 8, что соответствует фиксации клещевин 4 в открытом положении (фиг. 7) происходит освобождение груза. После установки захвата на поверхность захватываемого груза (фиг. 7) крюк грузоподъемного механизма продолжает опускаться до полного сложения щарнирного параллелограмма по вертикали. При этом ось 5 вместе с ползуном 19 свободно скользя по поверхности паза 12, выреза 25 и скоса 11, отодвигает пластину 21 и выходит из скоса 11, закрывая его ползуном 19. После полного сложения шарнирного параллелограмма по вертикали производится подъем захвата. При этом ось (фиг. 8) вместе с ползуном 19, свободно скользя по поверхности защелки 8, проскальзывает скосы 11, 10 и 9 и пазы 13 и 12 в защелке 8 и двигается до момента захвата груза (фиг. 1). В случае попадания в захват груза, диаметр которого меньще диапазона работы захвата, ползун 19 упирается в упор 16, что предохраняет клещевины 4 от заклинивания. Применение данного захвата позволяет повысить надежность его работы, чем и обуславливается технико-экономическая эффективность предлагаемого захвата. Формула изобретения 1. Автоматический захват, содержащий шарнирно соединенные между собой клещевины, шарнирно соединенные с послед свешиваемые на грузоподъемное средство посредством серьги, и фиксатор для удержания клещевин в раскрытом положении, выполненный в виде установленной на осях шарниров, соединяющих клещевины и тяги, защелки со скосами и пазами для взаимодействия с одной из осей шарниров, отличающийся тем, что, с целью повышения надежности работы захвата, фиксатор снабжен размещенными с одной стороны защелки Пластиной и ползуном, установленными с возможностью перемещения вдоль защелки, и расположенными на ней пальцами, при этом в пластине и ползуне выполнен ы пазы и вырезы для рзаимодействия с одной из осей шарниров и пальцами. 2. Захват по п. 1, отличающийся тем, что внутренняя поверхность клещевин изогнута под углом 120°, а угол между нижней внутренней поверхностью каждой клещевины и ее нижней наружной поверхностью равен 30°. Источники информации, принятые во внимание при экспертизе 1. Патент ГДР № 93412, кл. В 66 С 1/42 1975 (прототип).
С Ь
иг.1
(Риг. 2 ВидА (риг.З
В 2 27
В-Б
SB
(Риг.
(риг,
