Изобретение Относится к подъемно транспортным машинам, а именно к си стемам управления тормозом шахтной подъемной машины.
.Известна система управления тормозом шахтной подъемной машины, содержащая гидроразмыкатель, связанный с ним гидролинией регулятор тормоз- . него усилия, электромагнитное реле, устройство предохранительного торможения , выходы которого связаны гидролинией с гидроразмыкателем и регулятором тормозного усилия, источник давления рабочей жидкости, связанный гидролинией с устройством предохранительного торможения, устройство рабочего торможения , выход которого связан гидролинией с-устройством предохранительного торможения , а- вход с источником давления рабочей жидкое ти, формирователь сигнала задания , включающий нерегулируемый дроссель .и управляемый дроссель, соединенный со -сливной гидролинией , причем выход формирователя соединен гидролинией с регулятором тормозного усилия датчик положения сосуда, механически связанный с валом подъемной машины и управляемым дросселем формирователя сигнала задания , датчик направления движения и остановки, выход которого связан гидролинией со входом формирователя сигнала задания, а вход механически связан с валом подъемной машины С13Недостатком этой системы является излишняя сложность, состоящая в наличии гидрораспределителя в формирователе сигнала задания, гидролинии связи формирователя с источником дав ления и дросселя в датчике направления движения. Цель изобретения -«упрощение системы и увеличение надежности ее работы путем сокращения числа примененных аппаратов и введения контроля За ее состоянием. i . Указанная цель достигается тем, что система управления тормозом шахт ной подъемной машины, содержащая гид роразмыкатель, связанный с ним гидролинией регулятор тормозного усилия электромагнитное реле, устройство предохранительного торможения, выходы которого связаны гидролинией с гидроразмыкателем и регулятором тормозного усилия, источник давления рабочей жидкости, связанный гидролинией с устройством предохранительноги торможения, устройство рабочего торможения , выход которого связан гидролинией с устройством предохранительного торможения, а вход - с
источником давления рабочей жидкости, формирователь сигнала задан1 я, включающий нерегулируемый дроссель и управляемый дроссель соединенный -со сливной гидролинией, причем выход
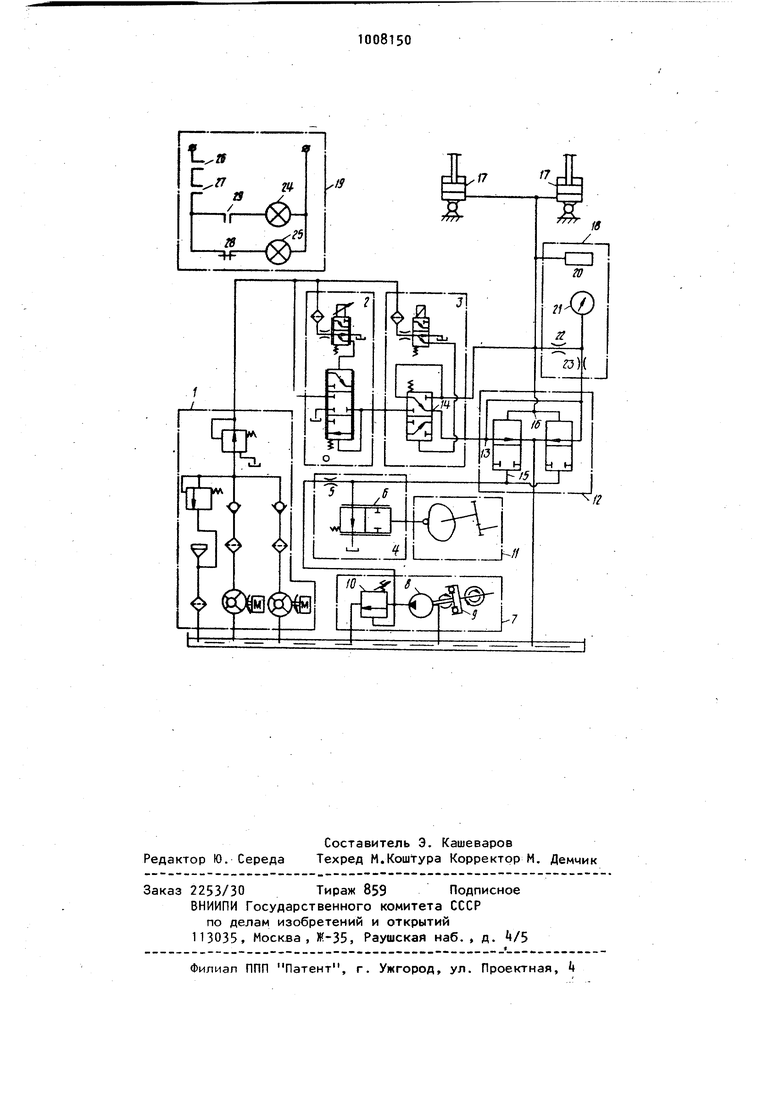
формирователя соединен гидролинией, с регулятором тормозного усилия, датчик положения сосуда, механически связанный с валом подъемной машины и управляемым: дросселем формирователя сигнала задания, датчик направления движения и остановки, выход которого связан гидролинией с входом формирователя сигнала задания, а вход механически связан с валом подъемной машины, вуход датчика напрарления движения и остановки сообщен с нерегулируемым дросселем формирователя сигнала задания. Кроме того, система снабжена устройством контроля, содержащим электрокоитактный манометр с нормально разомкнутым и нормально замкнутым контактами, канал с установленными в нем последовательно дросселями и реле давления с нормально разомкнутым контактом , причем электроконтактный манометр подключен к каналу между дросселями, канал связан с Линией гидроразмыкателя и входом регулятора тормозного усилия, а реле давления соединено с гидроразмыкателем. Кроме того, система снабжена устройством сигнализации, юэдержащим па-, раллельно включенные источники света , причем в цепь одного источника включен нормально разомкнутый контакт электроконтактного манометра, а в цепь другого источника - его нормально замкнутый контакт, последовательно обоим источникам света включены контакты реле давления и реле предохранительного торможения. На чертеже схема предлагаемой системы управления тормозом шахтной подъемной машины. . Система включает в себя источник 1 давления рабочей жидкости, устройства рабочего 2 и предохранительного 3 торможения, формирователь k сигналов задания, включающий нерегулируемый дроссель 5 питания и управляемый дроссель 6 слива, датчик 7 направления движения и остановки подъ -емной машины, включащий насос 8 объемного принципа действия, соединеннмй с валом подъемной мэшины посредством муфты 9 свободного хода, на выходе которого включен предохранительный клапан 10, датчик 11 положенйя подъемного сосуда в стволе, ре . гулятор 12 тормозного усилия, распределительная полость 13 которого подключена к сливной полости 1 устройства 3. лрёдохрГанйтельного торможения, камеры 15 управления. - к выходу формирю вате ля сигналов задания, а камера 16 обратной связи - к гидроразмыкатёлям 1 .тормоза, причем выход: датчика 7 направления движения- и остановки подъемной машины сое динен с нерегулируемым дросселем 5 питания формирователя k сигналов задания. Кроме того, система содержит.устройство 18 контроля и устройство 19 сигнализации, причем устройство 18 контроля включает электроконтактное реле 20 давления, подключенное к камере 16 обратной связи регулятора.12 .тормозного усилия, и, электрок нтактный манометр 21, включённый между двумя нерегулируемыми дросселями 22 И 23, установленными последовател эНо в канале, соединяющем гидроразмыкатель 17 с входом регулятора 12 тор мозного усилия, а устройство 19 сиг нализации включает две параллельно включенные цепи с источниками 2 и 25света, подключённые к источнику энергии через последовательно соеди ненные нормально открь1тые контакты. 26и 27 соответственно реле давления и реле предохранительного торможения, причем в цепь источника 25 света последовательно включен нормально -закрытый нижний контакт 28 электрокойтактного манометра, а в цепь 2 источника - нормально от-, крытый верхний контакт 29 электрокон тактного манометра. Система работает следующим об|| азом. При включении источника 1 давления на его выходе появляется давление и жидкость подается к устройству 2 рабочего торможения. Зарядка предохранительного тормоза осуществляется подачей напряжения на об. мотку управления устройства 3 предохранительного торможения, при это выход устройства 2 рабочего торможе ния через устройство 3 предохраните ного торможения соединяется с гидроразмыкателем 17. При включении устройства 2 рабочего торможения рабочая жидкость под давлением подается в гидроразкыкатель и подъемная машина растормаживается. В случае подъема груза муфта 9 свободного хода датчика-7 направления движения и остановки подъемной ма шины передает крутящий момент на вал насоса 8 и на его выходе появля1е тся давление, определяемое настройкой предохранительного 10 и необходимое для нормальной работы, формирователя k сигналов . б формирователь сигналов зада- . ния включены два дросселя: один - регулируемый дроссель 5. второй - управляемый дроссель 6. Соотношение . проходных сечений этих дросселей определяет давление жидкости на вы- ходе формирователя k сигналов задания. Так как на регулируемый дроссель воздействует датчик 11 положения подъемного сосуда в стволе, то давление на выходе формирователя А также зависит от положения подъемно- ; го. сосуда в стволе (, угла наклона участка выработки, на котором находится подъемный сосуд). Причем наибольшее давление на выходе формироВателя i выбрано меньшим давлениярастормаживания подъемной машины, поэтому при расторможенной машине золотники регулятора 2 тормозного усилия под действием давления в камере 16 обратной связи находятся в положении открыто. При предохранительном; торможении отключаются устройства рабочего 2 и предохранительного 3 торможения, и жидкость из гидроразмыкателя регулятор 12 тормозного усилия поступает на сливши давление в гидроразмыкателе 17 и соединенной с ними камере 16 обратной связи регулятора 12 тормозного усилия уменьшается. При снижении давления до величины, равной давлению на выходе формирователя сигналов задания, золотники регулятора 12 тормозного усилий пе- реключатся в положение Закрыто vT отсекут гидроразмыкатель 17 от слива, при этом в нем останется давление примерно равное давлению на выходе формирователя (сигналов задания. Таким образом, в случае предох- , ранительного торможения при подъеме груза к подъемной машине прикла--дывается степень тормозного усилия , величина которой определяется положением подъемного сосуда в стволе. При торможении подъемной машины скорость вращения ее органов навивки и кинематически связанного с ними насоса 8 датчика 7 направления движе ния и остановки подъемной машины : уменьшается. При достижении скорости при которой необходимо наложить усилие стопорения подъемной машины (ско рости давление на насоса 8 станет меньше настройки клапа на 10, которое необходимо для нормал ной работы формирователя 4 сигналов задания,и давление на выходе формирователя снизится. Под действием дав ления в камере 16 обратной связи золотники регулятора 12 тормозного уси ЛИЯ переключатся I в положение откры то и вся оставшаяся жидкость из гид роразмыкателей 17 сольется в маслоба т.е. належится полное тормозное усияие. При спуске груза муфта 9 свобрднй го хода работает в режиме холостого хода и не передает вращающий момент На вал насоса 8, на выходах датчика направления движения и остановки под емкой машины и формирователя k сигна лов задания давление отсутствует, золотники регулятора 12 тормозного усилия находятся в положении открыто и в случае предохранительного торможения вся рабочая жидкость из гидроразмыкателя 17 сливается в масл бак, т.е. происходит наложение полного тормозного усилия. При зарядке предохранительного тормоза нормально открытый контакт 27 реле предохранительного торможения замыкается, а при срабатывании реле 20 давления1,которое настроено на срабатывание при достижении давлейия растормаживания подъемной машины ) зам кнется его нормально открытый контакт 26 и устройство 19 сигнализации подготавливается к работе. Электроконтактный манометр 21 подключен к точке, давление в которой примерно равно половине давления в гидроразмыкателях 17. Нижний контакт его настроен на давление порядка « 0,1-0,2 МПа , а верхний контакт на давление РВ (0,1-0,2), где PpdcT- давление растормаживания подъемной машины, МПа. При нормальной работе системы давление в точке подключения электроконтактного манометра 21 находится в его рабочем диапазоне (от 0,1-0,2 МПа до PgJ, контакты 28 и 29 электроконтактного манометра 21 разомкнуты, источники 2 и 25 света отключены от источника энергии, т.е. световой сигнал не подается. При таких возможных неисправностях в системе, как заклинивание золотников регулятора 12 тормозного усилия в положение закрыто, превышение сигнала на выходе формирователя величины РрасТ засорение дросселя 23 устройства 18 контроля - давление в точке подключения электроконтактного манометра 21 станет равным Ррост что выше давления настройки верхнего контакта, и верхний контакт 29 замкнется, что приведет к подаче светового сигнала источником света. При засорении дросселя 22 устройства контроля давление в точке подсоединения электроконтактного манометра 21 исчезнет, его нижний контакт 28 замкнется , что приведет к подаче светового сигнала источником 25 света. Таким образом , гидравлическая часть предлагаемой системы управления обладает более простой конструкцией отсутствует аккумулятор давления рабочей жидкости, двухлинейный двухпозиционный гидрораспределитель) при сохранении всех функциональных возможностей устройства.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Система управления тормозом шахтной подъемной машины | 1978 |
|
SU747806A1 |
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1504211A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство управления пневмогрузовым приводом тормоза шахтной подъемной машины | 1983 |
|
SU1245536A1 |
1. СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗОМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ, содержащая гидроразмыкатель , связанный с ним гидролинйей регулятор тормозного усилия , электромагнитное реле, устройство npeдoxpaниffeльнoгo торможения , выходы которого связаны гидролинией с гидроразмыкателем и регулятором тормозного усилия, источник давления рабочей жидкости, связанный гидролинией с устройством предохранительного торможения, устройство рабочего торможения , выход которого связан гидролинией с устройством предохранительного торможения, а выход - с источником давления рабочей жидкости, формирователь сигнала задания, включающий нерегулируемый дроссель и управляемый дроссель, соединенный со сливной гид ролинией , причем выход формирователя соединен гидролинией с регулятором тормозного усилия, датчик положения сосуда , механически связанный с валом подъемной машины и управляемым дросселем формирователя сигнала задания, датчик направления движения и остановки, выход которого связан гидролинией с входом формирователя сигнала задания, а вход механически связан с валом подъемной машины, о т личающаяся тем, что, с Целью упрощения конструкции и повышения надежности, выход датчика направления движения и остановки сообщен с нерегулируемым дросселем формирователя сигнала задания. 2.Система по п.1, о т л и ч а ющ а я с я тем, что она снабжена устройством контроля, содержащим электроконтактный манометр с нормально разомкнутым и нормально замкнутым i контактами, канал с установленными в нем последовательно дросселями и ()еле давления с нормально разомкнутым кон- тактом, причем электроконтактный манометр подключен к каналу между дросселями , канал связи с линией гидро.размыкателя и входом регулятора тормозногр усилия, а реле давления соединено с гидроразмыкателем. О 00 3.Система по п.1, отличаю;Щ а я с я тем, что она снабжена уст;роЙством сигнализации, содержащим паел раллельно включенные источники света, причем в цепь одного источника включен нормально разомкнутый контак эяектроконтактИого манометра, а в цепь другого источника - его нормально замкнутый контакт, последовательно обоим источникам света включены ксжтакты реле давления « реле предохранительного торможения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
