Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам управления тормозом шахтных подъемных машин.
Цель изобретения- - повьш1ение на дежности.
На чертеже приведена гидросхема устройства управления тормозом шахтной подъемной машины.
Устройство управления тормозом содержит гидроагрегат 1, (источник давления рабочей жидкости), узлы рабочего 2 и предохранительного 3 торможения, датчик 4 направления движения и остановки подъемной машины, включающий насос 5 объемного
действия, соединенный с валом подъемной машины посредством г-гуфты 6 свободного хода. На выходе насоса 5 включен предохранительный клапан 7. Датчик 8 положения подъемного сосуда в стволе, вьшолненный в виде профилированного диска 9, соединен с валом подъемной машины посредством редуктора 10. Регулятор 11 тормозного усилия вьтопнен в виде двух- позиционного гидроуправляемого распределителя 12, распределительная полость 13 которого подключена к сливной полости 14 узла 3 предохранительного торможения. Камера 15 управления распределителя 12 подсоеди3 1
йена к вькоду датчика 4 направления движения и остановки подъемной машины, а камера 16 обратной связи - к гидроразмыкателю 17 тормоза, причем золотник распределителя 12 со стороны камеры 16 обратной связи выполнен с упором 18, взаимодействующим с проф1и1ированным диском 9 датчика 8 положения подъемного сосу- да в стволе.
Устройство работает следующим образом.
При включении гидроагрегата 1 на его выходе создается давление и жид- кость подается к узлу 2 рабочего торможения. Зарядка предохранительного тормоза осуществляется подачей напряжения питания на обмотку управления узла 3 предохранительно- го торможения, при этом выход узла 2 рабочего торможения через узел 3 предохранительного торможения соединяется с гидроразмыкателем 17 тормоза. При включении узла 2 рабочего торможения рабочая жидкость под давлением подается в гидроразмыкатель 17 и подъемная машина растормаживается.
В случае подъема груза муфта 6 свободного хода датчика 4 направления движения и остановки подъемной машины передает крутящий момент на вал насоса 5 и на его выходе появляется давление, определяемое наст- ройкой предохранительного клапана 7, которое подается в камеру 15 управления распределителя 12. Одновременно в камеру 16 распределителя 12 подается давление жидкости из гидро- размыкателя 17. Так как давление рабочей жидкости в гидрозамыкателе 17 больше, чем на выходе датчика 4 направления движения и остановки подъемной машины, распределитель 12 остается в открытом положении.
При подаче сигнала на предохранительное торможение отключается напряжение питания с -узлов рабочего 2 и предохранительного 3 торможения, жидкость из гидроразмыкателя 17 через регулятор 11 тормозного yci-шия поступает на слив и давление в гидроразмыкателе 17 и соединенной с ним камере 16 обратной связи распределителя 12 уменьшается. При снижении давления до величины, меньшей давления на выходе датчика 4 направления движения и остановки подъем
Q
5 0 5
О Q .,
5
114
ной машины, золотник распределителя 12 начинает перемещаться в сторону закрытия, уменьшая сечение проходного канала. Это перемещение происходит до тех пор, пока упор 18 не войдет в соприкосновение с профилированным диском 9 датчика 8 положения подъемного сосуда в стволе. Высота профиля диска 9 выполнена пропорционально углу наклона выработки в данной точке ствола.
При торможении подъемной ма1иины скорость вращения ее органов навивки и кинематически связанного с ними насоса 5 датчика 4 направления движения и остановки подъемной машины уменьшается. При достижении скорости, при которой необходимо приложить тормозное усилие стопорения подъемной маши}1ы, давление на выходе насоса 5 станет меньше давления оставшейся рабочей жидкости в гидроразмыкателе 17 тормоза. При этом под воздействием давления рабочей жидкости в гидроразмыкателе 17 тормоза, равного давлению в камере 16 обратной связи, золотник распределителя 12 переключится в положение Открыто и вся оставшаяся жидкость сольется в бак гидроагрегата, т.е. наложится полное тормозное усилие.
При спуске груза муфта 6 свободного хода работает в режиме холостого хода и не передает крутящий момент на вал насоса 5, на выходе датчика 4 направления движения и остановки подъемной машины и в камере 15 управления распределителем 12 давление отсутствует, золотник распределителя 12 находится в открытом положении и в случае предохранительного торможения вся рабочая жидкость из гидроразмыкателя 17 тормоза сливается в бак, т.е. происходит наложение полного тормозного усилия.
Формула изобретение
Устройство для управления тормо - зом подъемной машины, содержащее гидроагрегат, соединенный с гидроразмыкателем тормоза через узлы рабочего и предохранительного торможений, автономные датчики направления движения и остановки подъемной машины и регулятор тормозного усилия, выполненный в виде двухпозиционного гид- роуправляемого распределителя, гидравлическн связанного с выходом датчика направления движения и остановки, узлом предохранительного торможения и гидроразмыкателем, отличающееся тем, что, с целью повышения надежности, оно снабжено упором, прикрепленным к золотнику распределителя со стороны его связи с гидроразмыкателем, и датчиком псхло- жения клети с профилированным диском для воздействия на упор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1008150A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин | 1979 |
|
SU787327A1 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
| Гидропривод тормоза подъемной машины | 1984 |
|
SU1203015A1 |
| Гидравлический привод тормоза подъемной машины | 1984 |
|
SU1230980A1 |
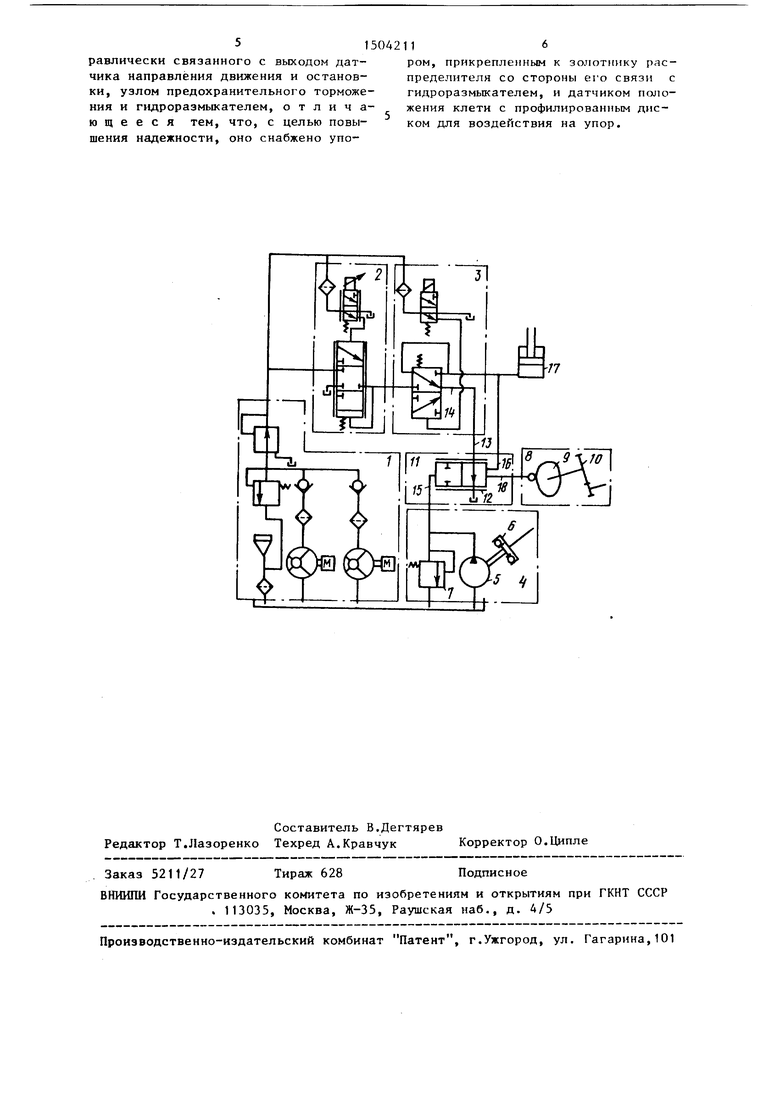
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано на подъемных машинах, эксплуатируемых в шахтных стволах с переменным по длине трассы углом наклона. Цель изобретения - повышение надежности. Устройство управления тормозом содержит регулятор 11 тормозного усилия, выполненный в виде гидроуправляемого распределителя 12 от датчика 4 направления движения и остановки подъемной машины и обратной связью от гидроразмыкателя 17 тормоза. Золотник гидрораспределителя 12 выполнен с упором 18, взаимодействующим с профилированным диском 9 датчика 8 местоположения подъемного сосуда. При предохранительном торможении при подъеме груза регулятор тормозного усилия, сравнивая давления на выходе датчика 4 и гидроразмыкателя 17 тормоза, устанавливает величину нарастания тормозного усилия в зависимости от местоположения подъемного сосуда в стволе. 1 ил.
| Гидравлический привод тормоза подъемной машины | 1984 |
|
SU1230980A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
