Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам управления пневмогрузовым приводом шахтной подъемной машины.
Цель изобретения - повышение надежности.
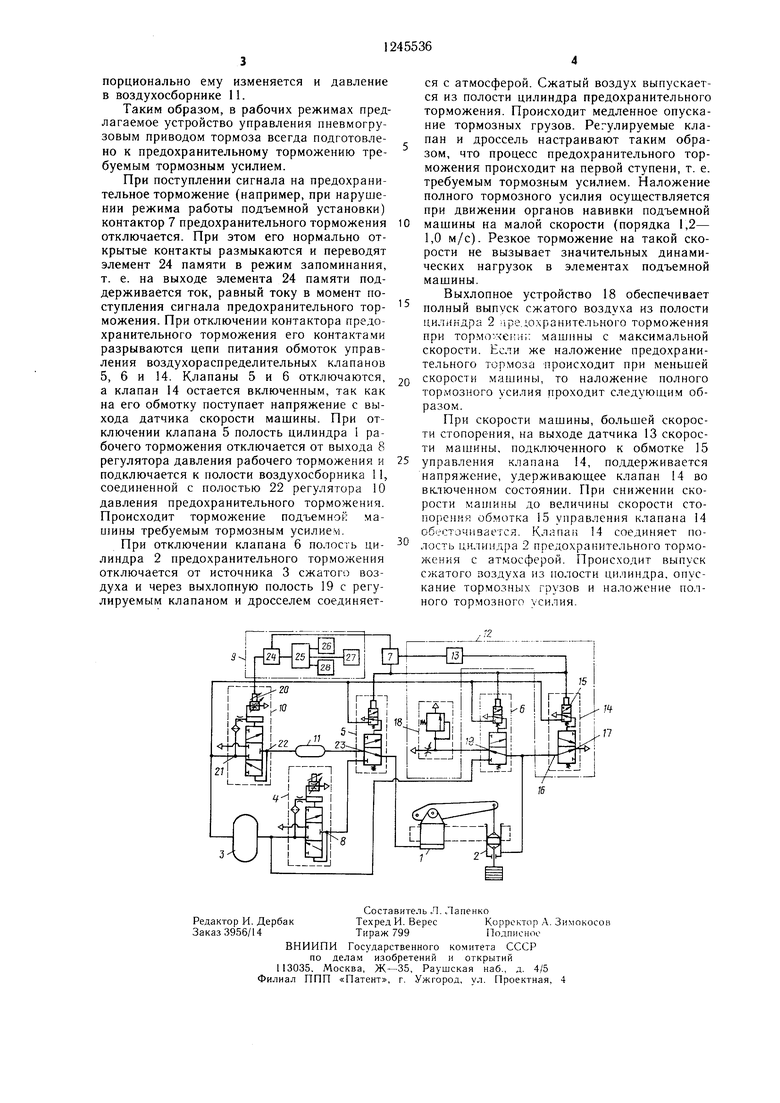
На чертеже представлена принципиальная пневматическая схема устройства управления пневмогрузовым приводом тормоза подъемной машины и структурная электрическая схема блока замедления машины.
Устройство содержит тормозные цилиндры рабочего 1 и предохранительного 2 торможения, источник 3 сжатого воздуха, регулятор 4 давления рабочего торможения, электропневматические воздухораспределительные клапаны 5 и 6 и контактор 7 предохранительного торможения, контакты которого включены в цепь питания обмоток управления электропневматических клапанов 5 и б. Полость цилиндра 1 рабочего торможения через первый воздухораспределительный клапан 5 соединена с выходом 8 регулятора 4 давления рабочего торможения, подключенног о к источику 3 сжатого воздуха, а полость цилиндра 2 предохранительного торможения соединена с источником 3 сжато1Ч) воздуха через второй воздухораспределительный кланан 6.
Устройство снабжено блоком 9 задания замедления машины, регулятором 10 давления предохранительного торможения, воздухосборником 11 и блоком 12 наложения полного тормозного усилия, содержаш,И1М датчик 13 скорости подъемной машины, соединенный с контактором 7 предохранительного торможения, дополнительный электропневматический воздухораспределительный клапан 14, обмотка 15 управления которого соединена с датчиком 13 скорости машины, причем входная полость 16 клапана 14 соединена с полостью цилиндра 2 предохранительного торможения, а выходная полость 17 - с атмосферой, и выхлопное устройство 18, содержаш,ее регулируемые клапан и дроссель, подключенное к выхлопной полости 19 второго воздухораспределительного клапана 6. Обмотка 20 управления регулятора iO давления предохранительного торможения подключена к выходу блока 9 задания замедления машины, соединенного с контактором 7 предохранительного торможения. Входная полость 21 регулятора 10 соединена с источником 3 сжатого воздуха, а выходная полость 22 - с воздухосборником 11 и второй входной полостью 23 воздухораспределительного клапана 5.
Блок 9 задания замедления машины со- .держит элемент 24 памяти, соединенный своим входом с контактором 7 предохранительного торможения,и сумматор 25, к входам которого подключены датчик 26 пути, датчик 27 направления движения и датчик 28 нагрузки на валу подъемной машины. Вы
5
0
5
0
0
ход сумматора 25 соединен с вторым входом элемента 24 памяти.
Регулятор 4 давления рабочего торможения предназначен для регулирования давления в полости цилиндра 1 рабочего торможения при рабочем торможении, а регулятор 10 давления предохранительного торможения - для поддержания в воздухосборнике 11 давления, обеспечивающего предохранительное торможение подъемной машины требуемым тормозным усилием. Воздухосборник 11 позволяет повысить быстродействие тормоза за счет подачи сжатого воздуха и полость цилиндра I рабочего торможения требуемого давления сразу после переключения клапана 5. При отсутствии воздухосборника требуется время на отработку регулятором давления сигнала задания. Кроме того, наличие воздухосборника 11 позволяет осуществлять контроль исправности системы регулируемого предохранительного торможения.
Устройство управления пневмогрузовым приводом тормоза работает следующим образом.
При выполнении подъемной установки рабочих операций {спуск или подъем груза, перегон порожних сосудов и др.) контактор 7 гфе/юхранительного торможения включен. Его контактами катушки воздухораспределительных клапанов 5, 6 и 14 подключены к источнику напряжения (не показан), клапан 5 соединяет полость цилиндра 1 рабочего торможения с выходом 8 регулятора 4 давления рабочего торможения. Клапан 6 соединяет полость цилиндра 2 предохранительного торможения с источником 3 сжато1 0 воздуха. Входная полость 16 клапана 14 с атмосферой не соединяется.
Выходные сигналы датчиков пути 26, направления движения 27 и нагрузки 28 на валу подъемной машины поступают на входы сумматора 25. На выходе последнего формируется сигнал, пропорциональный величине требуемого 1 ормозного момента. Этот сигнал поступает на вход элемента 24 памяти.
В рабочих режимах контактор 7 постоянно включен, его нормально открытыми контактами элемент 24 памяти поддерживается в режиме повторения входного сигнала, т. е. на выходе элемента памяти формируется изменяющийся во времени сигнал, про- порциональн 1Й входному (сигналу на выходе сумматора 25). Сигнал с выхода элемента 24 памяти в виде тока управления воздей- - ствует на обмотку 20 управления регулятора 10 давления предохранительного торможения, и в выходной полости 22 регулятора 10 и в воздухосборнике 11 устанавливается давление, пропорциональное требуемому тормозному усилию. Так в обмотке 20 управления регулятора 10 изменяется в зависимости от величины и знака статического усилия на ободе барабана машины. Про5
порционально ему изменяется и давление в воздухосборнике 11.
Таким образом, в рабочих режимах предлагаемое устройство управления пневмогру- зовым приводом тормоза всегда подготовлено к предохранительному торможению требуемым тормозным усилием.
При поступлении сигнала на предохранительное торможение (например, при нарушении режима работы подъемной установки) контактор 7 предохранительного торможения отключается. При этом его нормально открытые контакты размыкаются и переводят элемент 24 памяти в режим запоминания, т. е. на выходе элемента 24 памяти поддерживается ток, равный току в момент поступления сигнала предохранительного торможения. При отключении контактора предохранительного торможения его контактами разрываются цепи питания обмоток управления воздухораспределительных клапанов 5, 6 и 14. Клапаны 5 и 6 отключаются, а клапан 14 остается включенным, так как на его обмотку поступает напряжение с выхода датчика скорости машины. При отключении клапана 5 полость цилиндра I рабочего торможения отключается от выхода 8 регулятора давления рабочего торможения и подключается к полости воздухосборника 11, соединенной с полостью 22 регулятора 10 давления предохранительного торможения. Происходит торможение подъемной машины требуемым тормозным усилием.
При отключении клапана 6 полость ци- линдра 2 предохранительного торможения отключается от источника 3 сжатого воздуха и через выхлопную полость 19 с регулируемым клапаном и дросселем соединяет
5
0 5
0
ся с атмосферой. Сжатый воздух выпускается из полости цилиндра предохранительного торможения. Происходит медленное опускание тормозных грузов. Регулируемые клапан и дроссель настраивают таким образом, что процесс предохранительного торможения происходит на первой ступени, т. е. требуемым тормозным усилием. Наложение полного тормозного усилия осуществляется при движении органов навивки подъемной машины на малой скорости (порядка 1,2- 1,0 м/с). Резкое торможение на такой скорости не вызывает значительных динамических нагрузок в элементах подъемной машины.
Выхлопное устройство 18 обеспечивает полный выпуск сжатого воздуха из полости цилиндра 2 :1редолранительного торможения при тормо чени;; машины с максимальной скорости. Если же наложение предохранительного тормоза происходит при меньшей скорости машины, то наложение полного тормозного усилия проходит следующим образом.
При скорости машины, большей скорости стопорения, на выходе датчика 13 скорости маш.чны, подключенного к обмотке 15 управления клапана 14, поддерживается напряжение, удерживающее клапан 14 во включенном состоянии. При снижении скорости машины до ве.тичины скорости стопорения обмотка 15 управления клапана 14 обесточивается. Клапан 14 соединяет полость цилиндра 2 предохранительного торможения с атмосферой. Происходит выпуск сжатого воздуха из полости цилиндра, опускание тормозных грузов и наложение полного тормозного усилия.
Редактор И. Дербак Заказ 3956/14
Составитель Л. Лапенко
Техред И. ВересКорректор А. Зкмокосов
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035. Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1523511A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Система управления гидравлическим приводом тормоза подъемных машин | 1974 |
|
SU573430A1 |
| Устройство управления тормозом подъемной машины | 1989 |
|
SU1662919A1 |
| Устройство управления предохранительным тормозом подъемной машины | 1982 |
|
SU1115988A2 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
| Устройство для управления предохранительным тормозом подъемной машины | 1981 |
|
SU1094828A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1988 |
|
SU1652267A1 |
| Манец И | |||
| Г | |||
| и др | |||
| Ремонт шахтных подъемных машин | |||
| - М.: Недра, 1979, с | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
