(5) СХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| МАШИНА ДЛЯ КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ РЕЛЬСОВ | 1998 |
|
RU2186664C2 |
| Автооператор | 1975 |
|
SU541639A1 |
| Схват | 1983 |
|
SU1079429A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Схват | 1981 |
|
SU1013201A1 |
| АВТООПЕРАТОР МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 2005 |
|
RU2296039C2 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
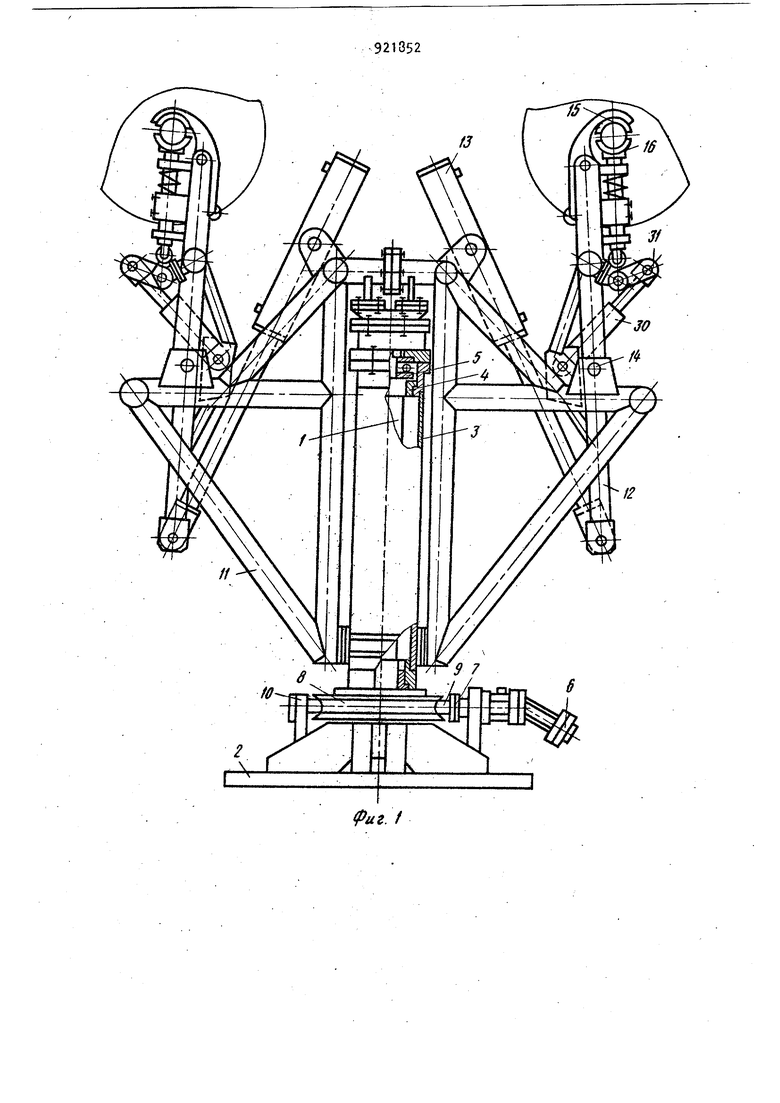
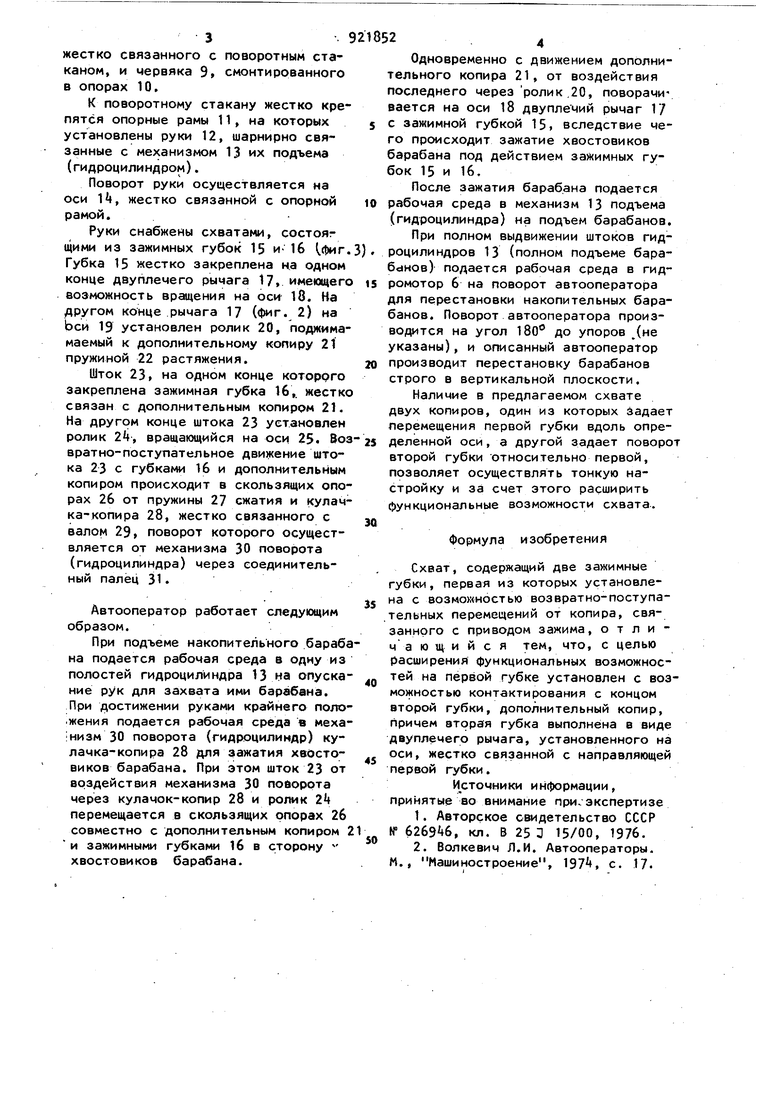
Изобретение относится к машиностроению и может быть применено, в частности, в автооператорах для загрузки и выгрузки изделий. Известен схват, предназначенный для захвата и переноса изделий, содержащий губки, выполненные в виде двуплечих рычсГгов, одни из концов ко торых контактируют с кожухом 1. Недостатком этого схвата является необходимость ручной корректировки. Известен также схват, одна из губок которого установлена с возможнос тью возвратно-поступательного -nepe-j мещения от кулачка-копира 2. Недостатком известного схвата является узость функциональных возможностей, связанная с отсутствием тонкой регулировки его. Цель изобретения - расширение фун циональных возможностей. Поставленная цель достигается тем 4TQ в схвате, содержащем двезажимные губки, первая из которых установлена с возможностью возвратно-поступательных перемещений от копира, связанного с приводом зажима, на первой губке установлен с возможностью контактирования с концом второй губки дополнительный копир,причем вторая губка выполнена в виде двуплечего рычага, установленного на оси, жестко связанной с направляющей первой губки. ;; На фиг. 1 изображен автооператор, оснащенный предлагаемым схватом; на фиг. 2 - с закрепленным изделием; на фиг% 3 - то же, с разведенными губками. На неподвижной стойке 1, жестко связанной с основанием 2, установлен поворотный стакан 3, вращение которого осуществляется в двух скользящих опорах 4 и упорном подшипнике 5 от гидромотора 6 через соединительную зубчатую муфту 7 и червячную пару, состоящую из червячного колеса 8, жестко связанного с поворотным стакаком, и червяка 9 смонтиррванного в опорах 10. К поворотному стакану жестко крепятся опорные рамы 11, на которых установлены руки 12, шарнирно связанные с механизмом 13 их подъема (гидроцилиндром). Поворот руки осуществляется на оси k, жестко связанной с опорной рамой. Руки снабжены схватами, состояг щими из зажимных губок 15 и- 16 фиг Губка 15 жестко закреплена на одном конце двуплечего рычага 17 имеющего возможность вращения на оси 18. На другом конце рычага 17 (фиг. 2) на Ьси 19 установлен ролик 20, поджимамаемый к дополнительному копиру 21 пружиной 22 растяжения. Шток 23, на одном конце которого закреплена зажимная губка 16,. жестко связан с дополнительным копиром 21. На другом конце штока 23 установлен ролик 2, вращающийся на оси 25. 80 вратно-поступательное движение штока 23 с губками 16 и дополнительным копиром происходит в скользящих опорах 26 от пружины 27 сжатия и кулачка-копира 28, жестко связанного с валом 29 поворот которого осуществляется от механизма 30 поворота (гидроцилиндра) через соединительный палец 31. Автооператор работает следующим образом. При подъеме накопительного бараба на подается рабочая среда в одну из полостей гидроцилиндра 13 на опуска ние рук для захвата ими барабана. При достижении руками крайнего поло жения подается рабочая среда в меха низм 30 поворота (гидроцилиндр) кулачка-копира 28 для зажатия хвостовиков барабана. При этом шток 23 от воздействия механизма 30 поворота через кулачок-копир 28 и ролик 2 перемещается в скользящих опорах 26 совместно с дополнительным копиром и зажимными губками 16 в сторону хвостовиков барабана. Одновременно с движением дополнительного копира 21, от воздействия последнего через ролик ,20, поворачи вается на оси 18 двуплечий рычаг Г/ с зажимной губкой 15, вследствие чего происходит зажатие хвостовиков барабана под действием зажимных губок 15 и 16. После зажатия барабана подается рабочая среда в механизм 13 подъема (гидроцилиндра) на подъем барабанов. При полном выдвижении штоков гидроцилиндров 13 (полном подъеме барабанов) подается рабочая среда в гидромотор 6 на поворот автооператора для перестановки накопительных барабанов. Поворот автооператора производится на угол до упоров Дне указаны), и описанный автооператор производит перестановку барабанов строго в вертикальной плоскости. Наличие в предлагаемом схвате двух копиров, один из которых задает перемещения первой губки вдоль определенной оси, а другой задает поворот второй губки относительно первой, позволяет осуществлять тонкую настройку и за счет этого расширить функциональные возможности схвата. Формула изобретения Схват, содержащий две зажимные губки, первая из которых установлена с возмо хностью возвратно-поступательных перемещений от копира, связанного с приводом зажима, отличающийся тем, что, с целью расширения функциональных возможностей на первой губке установлен с возможностью контактирования с концом второй губки, дополнительный копир. Причем вторая губка выполнена в виде двуплечего рычага, установленного на оси, жестко связанной с направляющей первой губки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № б2б9 6, кл. В 25 3 15/00, 1976. 2.Волкевич Л.И. Автооператоры. М., Машиностроение, 197, с. 17. ff ff
/7
fS
Фаг.З A
