1
Изобретение относится к машиностроению, в частности к шарнирным манипуляторам, и может быть использовано в конструкциях промышленных роботов для перемещения деталей при загрузке станков и прессового оборудования.
Известен манипулятор, содержащий смонтированный на станине подъемно-поворотный вал с механической рукой и схватом, привод кинематически связанный с кулачково-рычажным механизмом подъема поворота и опускания вала, имеющего двуплечий рычаг.
Недостатком известного манипулятора является низкая надежность работы, так как при подъеме и опускании механической руки, захвата и детали на двуплечем рычаге действуют относительно большие усилия, как результат действия гравитационных сил и сил инерции подвижных масс.
Для повышения надежности работы манипулятора предлагаемый манипулятор снабжен выполненными в виде упругих элементов и установленными на двуплечем рычаге демпфирующим устройством и компенсатором действия гравитационны сил механической руки, причем среднее рабочее усилие компенсатора действия гравитационных сил равно весу подвижных масс руки;
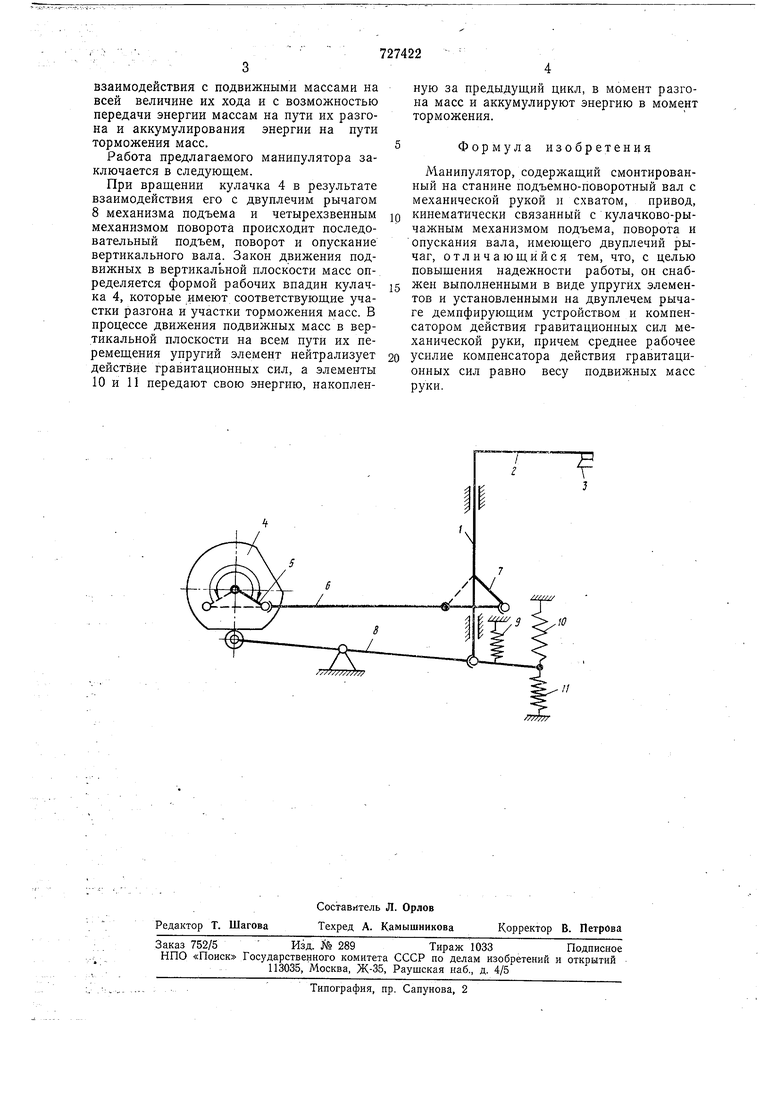
На чертеже дана кинематическая схема предлагаемого манипулятора. Он содержит смонтированный на станине (станина не показана) подъемно-поворотный вал I, жестко соединенный с плечом механической руки 2, на котором закреплен захват 3, привод подъема и поворота вертикального вала (привод не показан), на выходном валу которого закреплен дисковый кулачок 4 с рабочими впадинами, связанный с помощью кривошипа 5, шатуна 6 и коромысла 7 четырехзвенного механизма и двуплечего рычага 8 с вертикальным валом 1. Упругий элемент 9, закрепленный одним концом на двуплечем рычаге 8, а вторым - на станине, предназначен для нейтрализации действия гравитационных сил, силы упругости его направлены против направления действия сил гравитации, среднее рабочее усилие его равно весу подвижных масс.
Упругие элементы 10 и II, закрепленные
одним концом на двуплечем рычаге 8, а
вторым - на станине, предназначены для
. уравновешивания сил ййёрции подвижных
в вертикальной плоскости масс. Элементьг
10 и 11 устанавливаются с возможностью
взаимодействия с подвижными массами на всей величине их хода и с возможностью передачи энергии массам на пути их разгона и аккумулирования энергии на пути торможения масс.
Работа предлагаемого манипулятора заключается в следующем.
При вращении кулачка 4 в результате взаимодействия его с двуплечим рычагом 8 механизма подъема и четырехзвенным механизмом поворота происходит последовательный подъем, поворот и опускание вертикального вала. Закон движения подвижных в вертикальной плоскости масс определяется формой рабочих впадин кулачка 4, которые имеют соответствующие участки разгона и участки торможения масс. В процессе движения подвижных масс в вертикальной плоскости на всем пути их перемещения упругий элемент нейтрализует действие гравитационных сил, а элементы 10 и 11 передают свою энергию, накопленную за предыдущий цикл, в момент разгона масс и аккумулируют энергию в момент торможения.
Формула изобретения
Манипулятор, содержащий смонтированный на станине подъемно-поворотный вал с механической рукой и схватом, привод,
кинематически связанный с кулачково-рычажным механизмом подъема, поворота и опускания вала, имеющего двуплечий рычаг, отличающийся тем, что, с целью повыщения надежности работы, он снабжен выполненными в виде упругих элемеитов и установленными на двуплечем рычаге демпфирующим устройством и компенсатором действия гравитационных сил механической руки, иричем среднее рабочее
усилие компенсатора действия гравитационных сил равно весу подвижных масс руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU774940A1 |
| Манипулятор | 1978 |
|
SU751618A1 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Робот к листоштамповочному прессу | 1981 |
|
SU990502A1 |
