Загрузочное устройства
Фиг.1
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации технологических процессов.
Целью изобретения является повышение надежности и бе опасности работы манипулятора и расширение технологических возможностей за счет введения регулировки величины рабочего хода каретки.
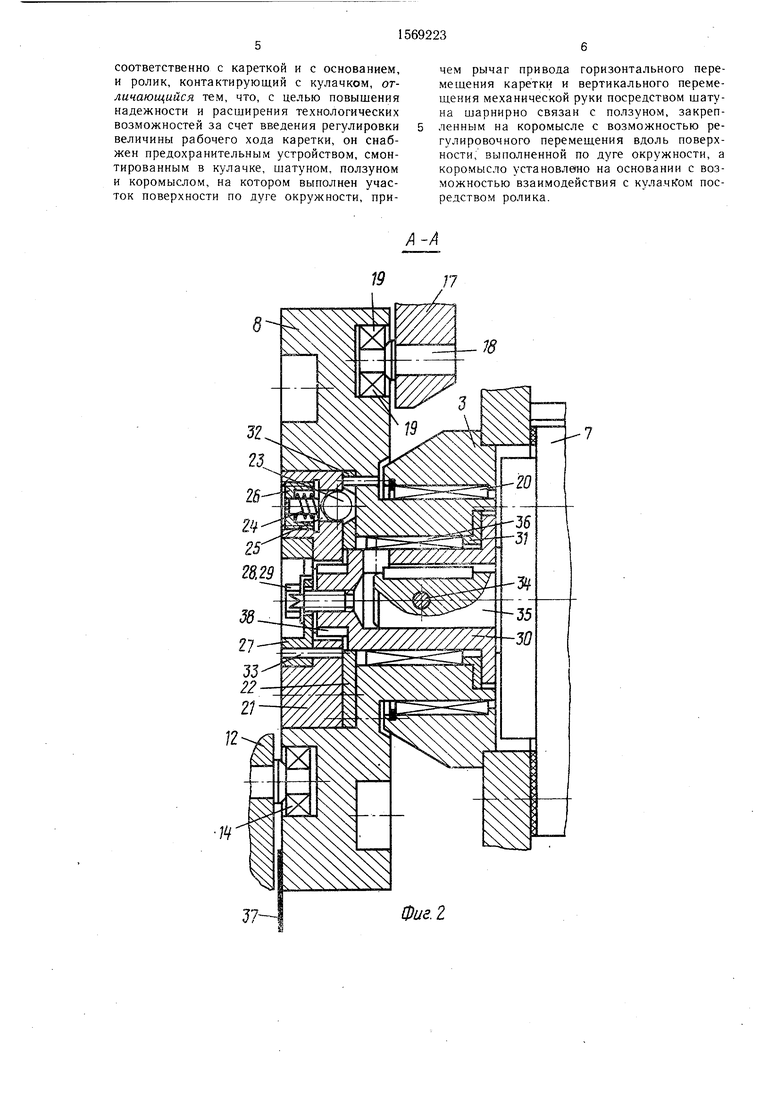
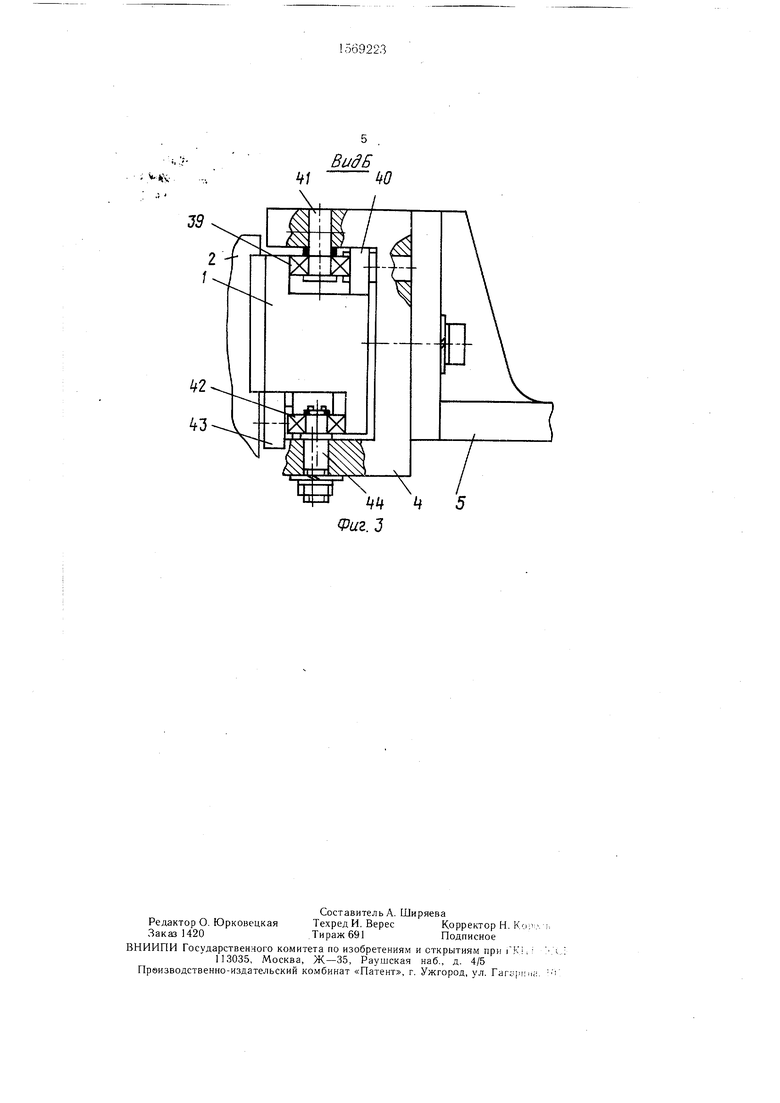
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. I.
Манипулятор содержит основание, механическую руку 1, установленную i-.a вертикальном валу 2, смонтированном в корпусе 3 основания с возможностью вертикального перемещения, каретку 4, установленную на механической руке 1 и несущую схват 5, и привод горизонтального перемещения карегки и вертикального перемещения механической руки. Привод горизонтального перемещения каретки 4 и вертикального переменения механической руки 1 выполнен в виде двигателя 6 с редуктором 7, закрепленным на корпусе 3 основания, кулачка 8, рычага 9, шарнирно связанного концами с основанием и с кареткой 4 посредством поводка 10, шатуна 1, шарнирно закрепленного на рычаге 9 и связанного с коромыслом 12 посредствоvi ползуна 13, причем коромысло 12 посредством ролика 14 контактирует с кулачком 8. Рычаг 9 подпружинен упругим элементом 15 для выборки люфтов.
Для регулирования величины рабочего хода каретки 4 со скваточ 5 и обеспечения их выстоя в постоянном положении - в зоне обработки, независимо от регулируемой величины рабочего хода, ползун 13 установлен с возможностью регулировочюго перемещения и фиксации винтом 16 на поверхности коромысла 12, которая выполнена по д ге окружности радиусом R, а центр радиуса размещен на оси О шарнирного соединения шатуна 11 с рычагом 9 при их выс- тое в требуемом независимом положении.
Вертикальный вал 2 связан с толкателем 17, на котором не оси 18 установлен ролик 19, контактирующий с кулачком 8.
Предохранительное устройство (фиг. 2) встроено в кулачок 8, установленный г, корпусе 3 на опоре 20, и содержит полумуфты 21 и 22, взаимодействующие посредством шариков 23, подпружиненных упругими элементами 24 через упоры 2,с, которые установлены на втулках 26. В осевом направлении кулачок и полумуфта 2 зафиксированы шайбой 27 с винтом 28 и стопорной шайбой 29, а также фланцем втулки 30, контактирующим с шайбой 3. Полумуфта 22, шайба 11 и втулка 30 зафиксированы штифтами 32-34.
0
5
0
0
0
5
0
Редуктор 7, закрепленный в корпусе 3 и связанный с двигателем 6, и втулка 30, установленная на выходном валу 35 редуктора 7. центрируются соосно с кулачком 8 в опоре 36. Флажок 37, взаимодействующий с датчиком 38 управления работой технологического оборудования, установлен на торце кулачка 8.
(фиг. 3) снабжена четырьмя 39 и 40, установлен- осях 41, и четырьмя 42 и 43, установлен- эксцентричных осях 44
Каретка 4 верхними роликами ными попарно на нижними роликами ными попарно на
для выборки люфтов и углового кинематического замыкания на ц -образной направляющей поверхности механической руки 1.
Снаружи манипулятор закрыт кожухом 45.
Манипулятор работает следующим образом.
От двигателя 6 через редуктор 7 и втулку 30, закрепленную на выходном валу 35 редуктора, вращение передается посредством шпонок полумуфте 21, от которой чеоез шарики 23, входящие в сцепление с полу муфтой 22, вращается кулачок 8. При превышении нагрузки в звеньях механизма больше допускаемой, на которую настраивается предохранительное устройство с помощью втулок 26, шарики 23 выходят из зацепления с полумуфтой 22 и кулачок 8 не вращается.
От кулачка 8 через ролик 14 получает движение коромысло 12, от которого через ползу 13. шатун 11, рычаг 9 и поводок 10 получает относительно механической руки 1 горизонтальное перемещение каретка 4 со схватом 5. От кулачка 8 через ролики 19 получает вертикальное перемещение толкатель 17, связанный с механической рукой 1.
Оснащение манипулятора предохранительным устройством для отключения механизма перемещения при превышении нагрузки больше допускаемой и механической рукой, выполненной в виде направляющей Ц -образной формы в поперечном сечении повышает надежность и безопасность работы, а введение независимой бесступенчатой регулировки величины рабочего хода и стабильного позиционирования каретки со схватом в зоне (точке) обработки позволяет расширить функционально-технологические возможности.
Фоомула изобретения
Манипулятор}содержащий основание, механическую руку с кареткой, установленной с возможностью горизонтального перемещения и несущей схват, и привод горизонтального перемещения каретки и вертикального перемещения механической руки, включающий двигатель, выходной вал которого кинематически связан с валом кулачка, рычаг, концы которого шарнирно связаны
соответственно с кареткой и с основанием, и ролик, контактирующий с кулачком, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей за счет введения регулировки величины рабочего хода каретки, он снабжен предохранительным устройством, смонтированным в кулачке, шатуном, ползуном и коромыслом, на котором выполнен участок поверхности по дуге окружности, причем рычаг привода горизонтального перемещения каретки и вертикального перемещения механической руки посредством шатуна шарнирно связан с ползуном, закрепленным на коромысле с возможностью регулировочного перемещения вдоль поверхности, выполненной по дуге окружности, а коромысло установлено на основании с возможностью взаимодействия с кулачком посредством ролика.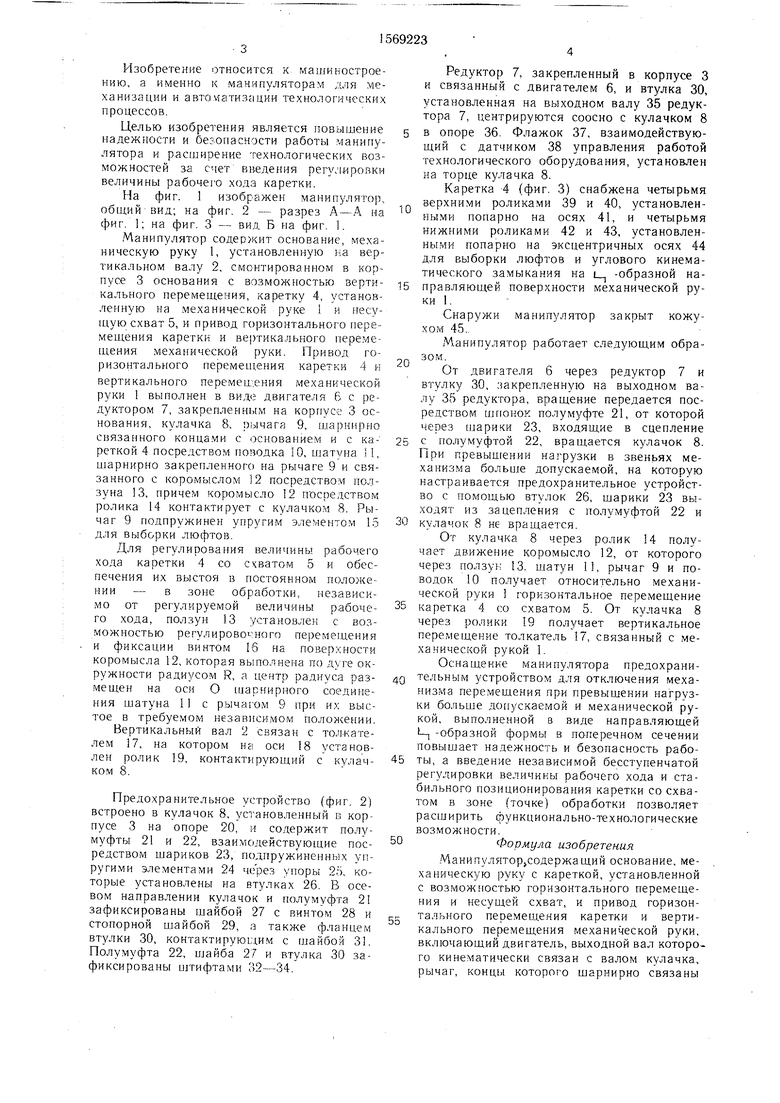
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU1013257A2 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Манипулятор | 1982 |
|
SU1060465A1 |
| Манипулятор | 1980 |
|
SU975383A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Манипулятор | 1983 |
|
SU1310200A1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| Манипулятор | 1991 |
|
SU1774914A3 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации технологических процессов. Целью изобретения является повышение надежности и расширение технологических возможностей за счет введения регулировки величины рабочего хода каретки. Это достигается тем, что ползун 13 установлен на коромысле 12 с возможностью регулировочного перемещения по поверхности, выполненной в виде окружности, и связан с рычагом 9 посредством шатуна 11. Кроме того с целью повышения надежности и безопасности работы кулачок 8 снабжен предохранительным устройством, отключающим механизм перемещения при превышении нагрузки больше допустимой. 3 ил.
Фиг. 2
.,ЧФиг. 3
| Манипулятор | 1980 |
|
SU975383A1 |
