1
Изобретение относится к области мапгиностроения, в частности к 1иариирным мапипу.чяторам и может бить исгк):1ь.чонаио li конструкциях jipoMbiHi.ieiHibix роботов для перемещения деталей нри загрузке 5 станков и прессового оборудования.
Известен манипулятор, содержащий смонтированный на станине подъемно-новоротный вал с механической рукой и схва10М, иривод, кинематически связанный с ю кулачково-рычажпым механизмом подъема, поворота и опускания вала, имеющим двуплечий рычаг, кривоишп, шатуи и коромысло 1.
Недостатком манипулятора является 15 низкая производительность, так как моменты инерции поворотных масс вала, механической руки со схватом, коромысла и кулачка ири относительно больщих скоростях приводят к резкому возрастанию динамических нагрузок в звеньях механизма, ограничивающих возможность повышения скорости.
Цель изобретеиия - новыщение производительности.25
Для этого манипулятор сиабжен дополнительным коромыслом, жестко закрепленным на валу и упругими элементами, связываюии1ми со станиной кривошип и концы донолнительиого коромысла.ЗО
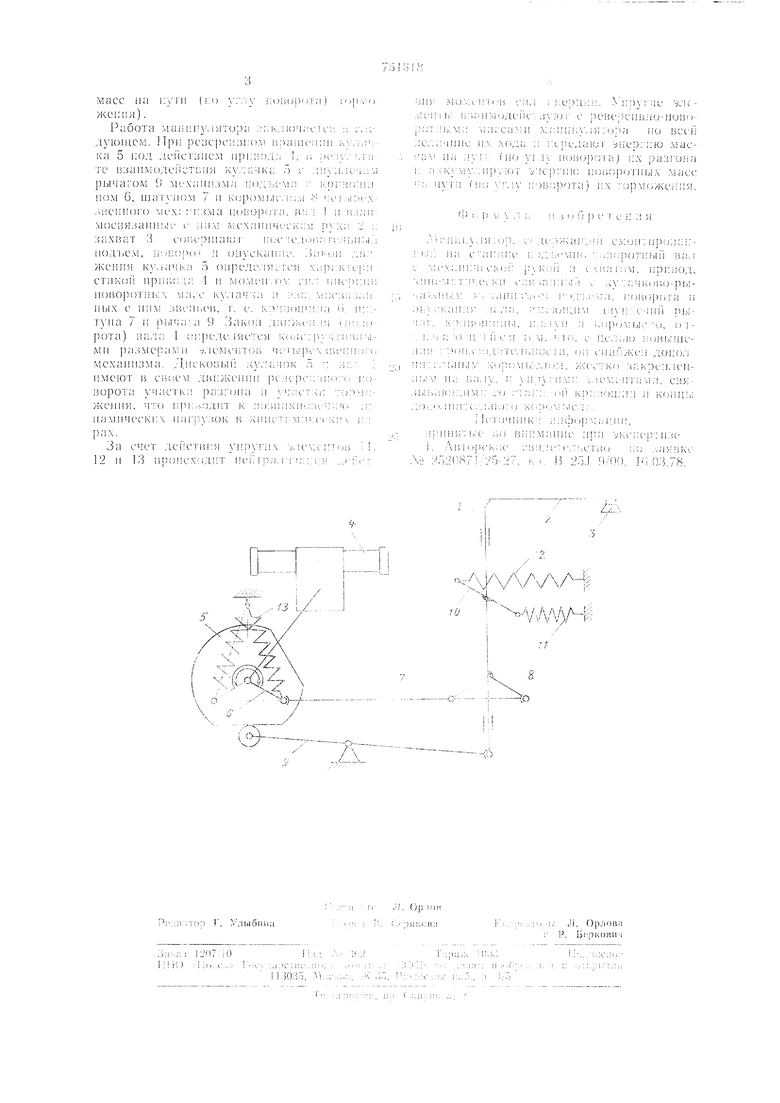
На чертеже нринсдеиа 1 1П1ематическая схема ман1ип.1ЯТ1)р:;.
i 1)едлагаемыП мапииу.чятор содержит смоитированньи иа станине (ие показана) иод7аемно-поворотный вертикальный вал 1, механическую руку 2, захват 3, реверсивньи привод 4 подъема и иоворота вертикальиого вала 1. На выходном валу привода 4 закреплен дисковь1Й с рабочимн впадинами кулачок 5, взгльмосвязанный с помощью четырехзвеииого механизма поворота в виде кривошипа 6, щатуна 7, коромысла 8 и рычажного мехаиизма подъема 9 с вертикальным валом 1. На вертнкальном валу 1 я-:естко закреплено доиолннтельное коромысло 10. концы которого соединены с помощью уиругнх элементов 11 и 12, иаиример, в виде пружинных растяжек, со стаиино.
Точка соединен 1я кривощипа 6 и шатуна 7 с ПОМОИ1ЫО упругого элемента 13, например, в виде пружинной растяжки, соединена со станиной. Уиругие элементы 11, 12 и 13 установлены с возможностью взаи:-,;одс1 1ствия с рсверспЕно-новоротными массами, взаимосвязапиыми с 1 и дисковым кулачком 5 иа Bceii величине угла поворота масс и с возможностью нередачн jJiepiHH массам иа пути (но углу новорота) их разгона и аккумулирования энергнн
масс на куги (со . i /копия).
Работа MaiU:i . 1ЯГ(;;)а ::а1.п;)ч;чi с:: :
дующем. При рС1)С|)СИ31:()л ) aii ICi i; i 11 к
;a 5 иод дсист:л1сл1 пркнод,:. , :; ;ч: Ic взаимодсПстипи ,:ач; ;: о г . а, pjjiiaroM О M(Xaiiii:jMa иод .Ki : ь:)г: иом о, 7 и (),i ;- лм .ii-;cinio|-(.) Mix: ИЗл1а . и-:; 1 н
МОСпЯЗаПИЫО г а:и M(.XailiI4;Ci ;: ; П х;
aaxiiai 3 coiH-piiiau; |- in-сAMI )|;;м-;-.; ||од;1)см, ii;M;)iu я опхскаипа. Sai-iai жсипя к 1ач1ча о опреда/ ; :. ч;и Xi:p;;K CTilKoii llpni;;: i;: I и HOMIMI . ( ;l:,: ilH iioiiOpoTiib: Маас .1ачха a . ;i;aca ИЫХ с iHiM aiuaibPii, r. C. n тупа 7 II piiiiara 9 jaiNoa д:-а: : 1а i, loial вала 1 (л:рСДС. isifroi : П . a n Mil ;;,icMciri;}ii мсхаииама. ;iaici() ,:ач()к a a a iiMCiOT ii ciUiCM днижсчши PC ai Pa aai i;-. н)Юга участка раааоиа a -част а ;( жсиия, что ) i aaaaaaavau аа ( иампчсчачИ iiaia au)K и хаагм MatcrX
Л
;(.:);
а) г с pcaKpciiiiMO-iiijiii) aniiiv, isj :)ра iiCj liccii ipaaaiiji i:iC;)a;;iO масlioiiopai a ) ax }a3i4jiia ) ii(aiop(/i4iux масс
. i j:X : ;jp O/Ktani/I.
I , а ; : :.С
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU727422A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| Устройство для обработки плоских заготовок | 1987 |
|
SU1518060A1 |
| Многорукий манипулятор | 1983 |
|
SU1085806A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Устройство для упаковки в бумагу цилиндрических рулончиков медицинской ваты | 1955 |
|
SU103537A1 |
