Изобретение относится к машиностроению и может быть использовано для выполнения вспомогательных операций в частности для переноса заготовок из загрузочного магазина в рабочую зону обрабатывающего станка или наоборот;.
Известен манипулятор, содержащий основание, привод и два пружиннорычажных схватау соединенных с ползунами. Манипулятор |)аботает так, что при зажиме. схвата второй разжимается и становится в положение неустойчивого равновесия 1
Однако данный манипулятор характеризуется недостаточной надежностью работы из-за отсутствия фиксации схватов в разжатом состоянии, что создает опасность при работе оператора.
Цель изобретения - обеспечение техники безопасности и повышение нешежности манипулятора путем блокировки схвата в разжатом состоянии
Указанная цель достигается тем, что манипулятор, содержсшщй основание, привод и два пружинно-рычажных схвата, соединенных с ползунами снабжен траверсой с шарнирно установленным на Ней КОРОМЫСЛСЯ14 и жестким упором, расположенным на основании, причем ползуны расположены в дополнительно выполненных на траверсе и кии латически связаны с одной стороны с коромысле, а с другой - с рычагами схвата, при этом упор расположен с возможностью взаимодействия с короьшслом.
На чертеже схематически изображе предлагаемый манипулятор.
Манипулятор состоит иэ основания 1, привода 2, вьшолненного в виде силового цилиндв а, и траверсы 3 с пальцем 4,. входящим в сообщаюпшеся между собой канавки с вертикальными и наклонными участками, которые выполнены на цилиндрической поверхности колонны основания 1.
На противоположных концах траверсы 3 находятся два пружинно-рычажных схвата, содержащие захваты 5 и б, стягиваемые, пружинами 7 ив. Каждай из этих захватов рычагами 9
или 10 шарнирно соединен соответственно с ползунами 11 и 12 в пазы которых входят с некоторым зазором концы коромысла 13. На основании 1 колонны установлен жесткий упор 14 и заготовка 15.
Манипулятор работает следуюВ1ИМ образом.
В опущенном положении траверсы 3 упор 14 воздействует на коромысло 13 так, что его плечо, входящее в паз ползуна 12, поднимает этот ползун, синхронно сведя рычаги 10. Под действием пружины 8 захваты б зс1жииают заготовку 15. Одновременно, за счет опускания второго плеча короллсла 13, ползун 11 разводит захваты 5 рычагами 9, устанавливая последние в одну линию,- т.е. в мертвое положение.
При ходе штока силового цилиндра
2вверх траверса 3 поднимается и поворачивается на 90 в результате взаимодействия пальца 4 с канавкаык на колонне основания 1.
Достигнув верхней точки, шток цилиндра 2 врзвращается вниз, и траверса 3 при опускании поворачивается еще на 90, вводя заготовку 15 в рабочую зону обрабатывгцэдей машины Во время переноса заготовки захваты б остаются св«девньа 4и, а захваты 5 разведенными, так как посредствен коромаЬлА 13 под воздействием прухсины 8 рычаги 9 сохраняют свое положение. В конце опускания траверсы
3коромысло 13 взаимодействует с упором 14 и поворачивается так, что захваты 6 расходятся,. освобождают перенесенную заготовку 15 и остаются в разведенном положении, а захваты 5 под действием пружины 7 зажимают следуювцлю заготовку на познции загрузки.. Теперь пружина 7 блокирует эазсвапл 6 через коромысло 13. Дгшее цикл повторяется.
Применение манипулятора в машиностроении при выполнении вопомогательных операций повышает надежност его работы за счет нгшичия блокировки разжатого схвата и обеспечивает безопасную работу оператора. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1331638A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Схват манипулятора | 1988 |
|
SU1585146A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Манипулятор | 1979 |
|
SU829412A1 |
| Захватное устройство для контейнеров | 1986 |
|
SU1399253A1 |
| МАНИПУЛЯТОР К ШТАМПОВОЧНОМУ МОЛОТУ | 1990 |
|
RU2036040C1 |
МАНИПУЛЯТОР, содержащий основание,, привод и два пружинно-рычажйых схвата, соединенных с ползунами, о т Я и ч а ю щи И с я тем,что. // с целью обеспечения техники Сеэопасно- сти и повышения его надежности путем блокировки схвата в разжатом состоянии, он снабжен траверсой с шарнирно установленным на ней корО1«1Слом и жестким упором, расположенньт на .основании, причем ползуны расположе- ны в дополнительно выполненных на траверсе отверстиях и кинематически связаны с одной стороны с коромыслом, а с другой - с рычагами схвата, при этом упор расположен с возможностью взаимодействия с корО1 шслом. 0 ел СП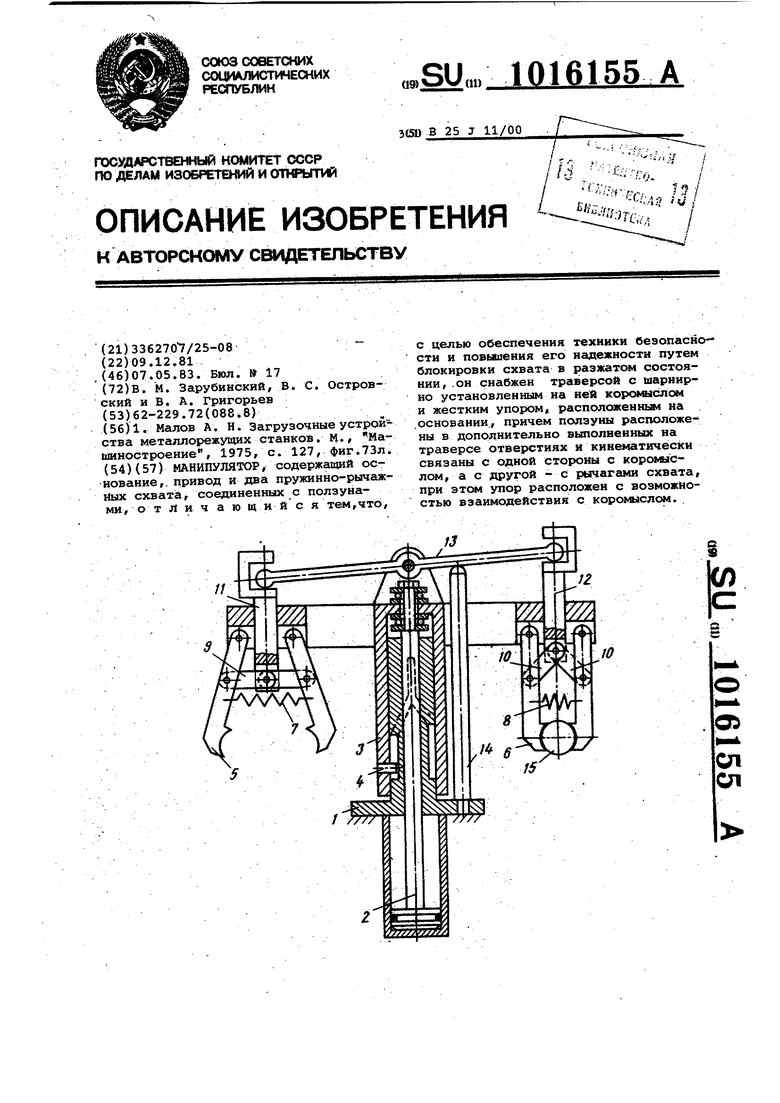
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Малов А | |||
| Н | |||
| Загрузочные устройства металлорежущих станков | |||
| М., Машиностроение, 1975, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
