(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ И ВУЛКАНИЗАЦИИ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1997 |
|
RU2131355C1 |
I
Изобрегение огносигся к консгрукции манипулягоров для выполнения вспомс гагепьных операций при механической об работке дегалей.
Извесген манипулятор, содержащий механическую руку, корпус с рычажным схватом и механизмы вертикального и горизсмтального перемещения и поворота, например в виде силовьк цилиндров ij.
Недостатком данного устройства является ненадежность его работы.
Цель изобретения - повьпдение надежности работы манипулятора.
Цель достигается тем, что манипулятср снабжен дополнительным силовым цилиндром с двумя поршнями, шток которого жестко связан со штоком силового цилиндра механизма вертикального перемещения, причем рычаги схвата шарнирно связаны со штоком цилиндра механизма горизонтального перемещения, а корпус схвата подпружинен на этот шток.
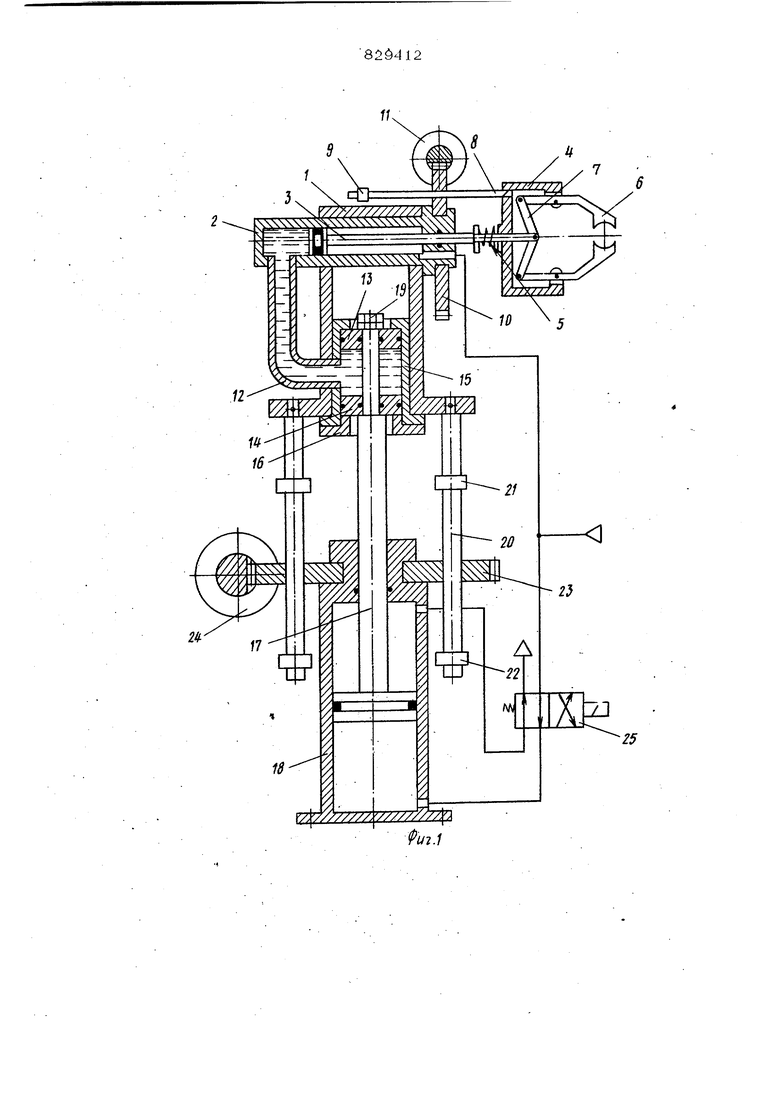
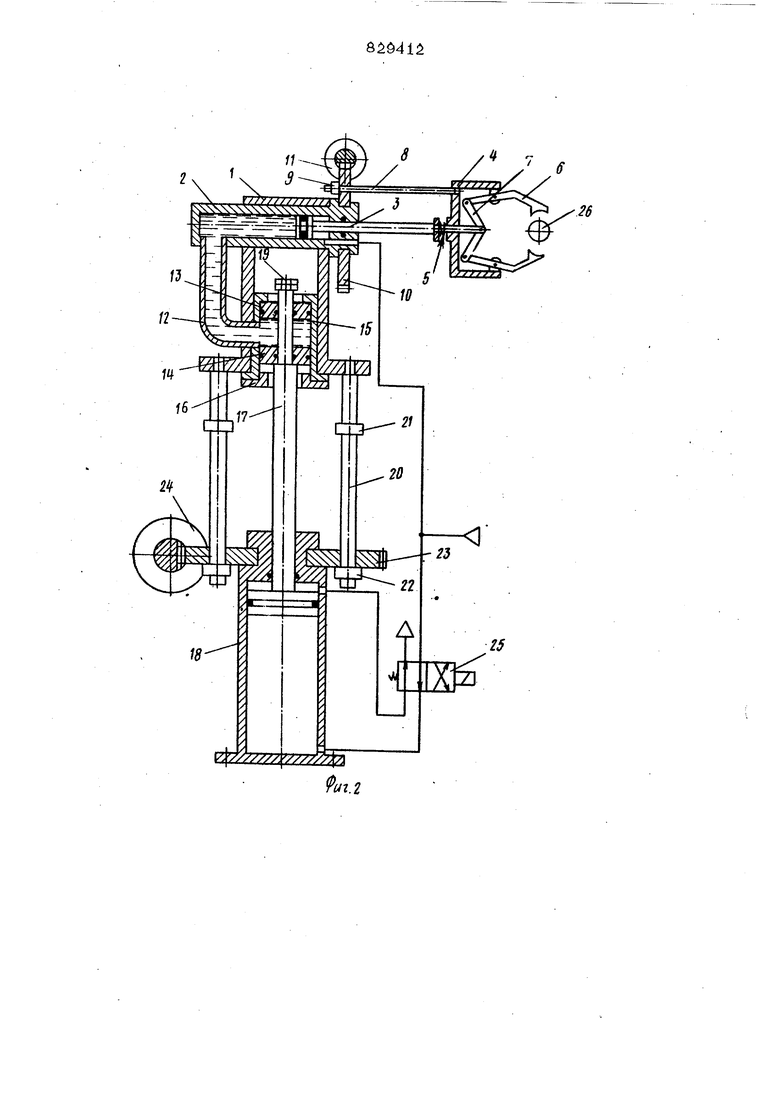
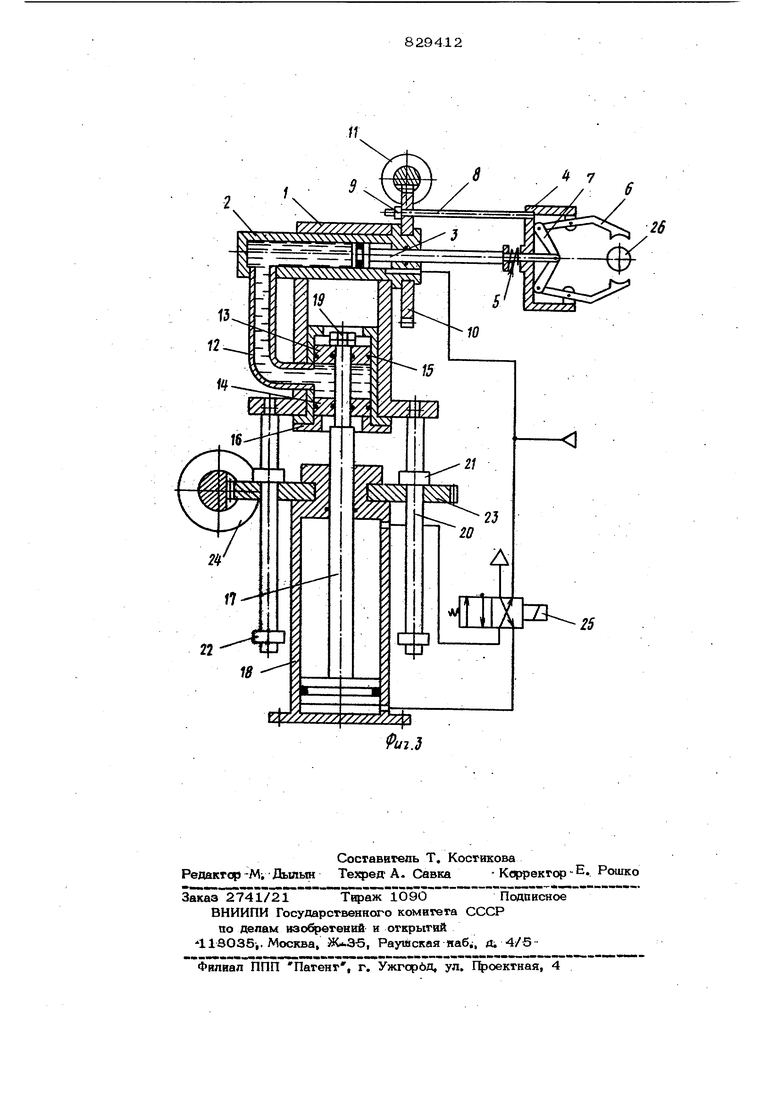
На фиг. 1 изображен описываемый манипулятор при подъеме (опускании;; на
фиг. 2 и 3 - то же, в конце хода штсжа цилиндра вергшсального перемещения вверх и вниз соответственно.
В подъемном корпусе 1 манипулятора (фиг. 1) закреплен цилиндр 2 горизонтального перемещения, на штоке 3 которого установлен 4 схвата, подпружиненный на этот пружиной 5. Рычаги 6 схвата серьгами 7 шарнирно связаны с тем же штоком. К корпусу 4 схвата прикoреплена тяга 3 с упеком 9, пропущенная в рычага 10, кoтqэый реечной передачей соединен с цилиндром 11 поворота схвата. Гфавая полость цилиндра 2 постоянно соединена с магистралью
s (пневматической или гидравлической), подающей давление в исполнительные цилиндры манипулятора, а левая - заполнена рабочей жидкостью и трубопроЪодом 12 соединена с замкнутым пространством между поршнями 13 и 14 вспомогательного цилинщж 15, встроенного в подъемный корпус 1. Эти поршни упираются соответственно в дно и в крышку 16 цилиндра 15 и надеты на шток 17 цилиндра вергикального перемещения между усгупом на штоке и гайками 19, т.е. с возможно- стью одностороннего осевого смешения относительно штока 17. На корпусе 1 закреплены две направляющие штанги 20 с верхними 21 и нижними 22- упорами, проходящие сквозь .отверстия планшайбы 23, соединенной реечной передачей с цилиндром 24 поворотов вокруг вертикальной оси. Полости цилиндра 18 вертикальных перемещений соединены с электромагнитным клапаном 25. При подаче давления в нижнюю полость цилиндра 18 шток 17 движется вверх. Так как правая полость цилиндра 2 гс изситальнаго перемещения постоянно соединена с напорной магистралью, то в левой его полости развивается некоторое давление, под действием которого поршни 13 и 14 прижаты к своим упорам каждый с уси лием, определяемым давление в левой полости цилиндра 2 и площадью этих Это усилие превышает вес поднимаемой части манипулятора и силу трения в напра вляющих, поэтому поршни 13 и 14 сохраHJDOT свое положение в цилиидре 15 во время вертикального движения. Когда упоры 22 достигнут планшайбы 23, подъем корпуса 1 прекращается. Шток 17 цилиндра 13 вертикального перемещения своим усгупом поднимает нижний поршень 14, вытесняя некоторую порцию рабочей жидкости из цилиндра 15 в левую полость цилиндра 2. ШЛ)к 3 выдвигает вправо схваг до тех пор, пока упор 9, достигнув рычага 10, не остановит корпус 4 схвата ГТри дальнейшем движении шток 3 сжимает пружину 5 и, воздействуя на серьги 7 разводит рычаги 6 схвата, после чего осганавливается (фиг. 2). В разжатые рычаги 6 схвата подается загружаемая деталь 26, затем клапан 25 переключается. Давление подается в верхнюю полость цилиндра 18, и шток 17 опускается, освобсждая поршень 14. Под воздействием давления в правой полости цилиндра 2 штсж 3 отходит влево, при этом рычаги 82 18 124 6 схвата сводятся, зажимая деталь 26, Затем движется влево и корпус 4 схвата, пока поршень 14 не упрется в крышку 16. После этого начинается опускание всего корпуса 1 вместе со-штоком 17. Оно продолжается до тех пор, пока упоры 21 не достигнут планшайбы 23 и остановят корпус 1 в нижнем положении. При дальнейшем ходе штока 17 вниз пфшень 13, увлекаемый гайками 19, опускается, вытесняя часть жидкости из цилиндра 15 в цилиндр 2 горизонтального перемещения, Схват вновь выдвигается вправо До положения, определяемого упо- ром 9, останавливается, после чего шток 3, сжимая пружину 5, разврдит рычаги и освобождает деталь 26 (фиг. 3). Предлагаемый манипулятор обесречивает управление разжимом и зажимом рычагов схвата и его горизонтальйыми и вертикальными перемещениями от одного электромагнитного клапана, что существенно повышает надежность работы мани- пулятора в целом. Формула изобретения Манипулятор, содержащий механическую руку, корпус с рычажным схватом и механизмы вертикального и горизонтального перемещений и поворота, например, в виде силовьк цилиндров, отличающийся тем, что, с целью повьшхения надежности работы, он снабжен дополнительным силовым цилинщ)ом с двумя поршнями, шток которого жестко связан со штоком силового цилиндра л еханизма вертикального перемещения, причем рычаги схвата шарнирно связаны со штоком циnmippa механизма горизонтального перемещения, а корпус схвата подпружинен на этот шток. , Источники информации, принятые во внимание при экспертизе 1Г Белянин П. Н. Промьпиленные роботьи М., Машиностроение, 1975, с.162-164.
25
25 4 рв 7
