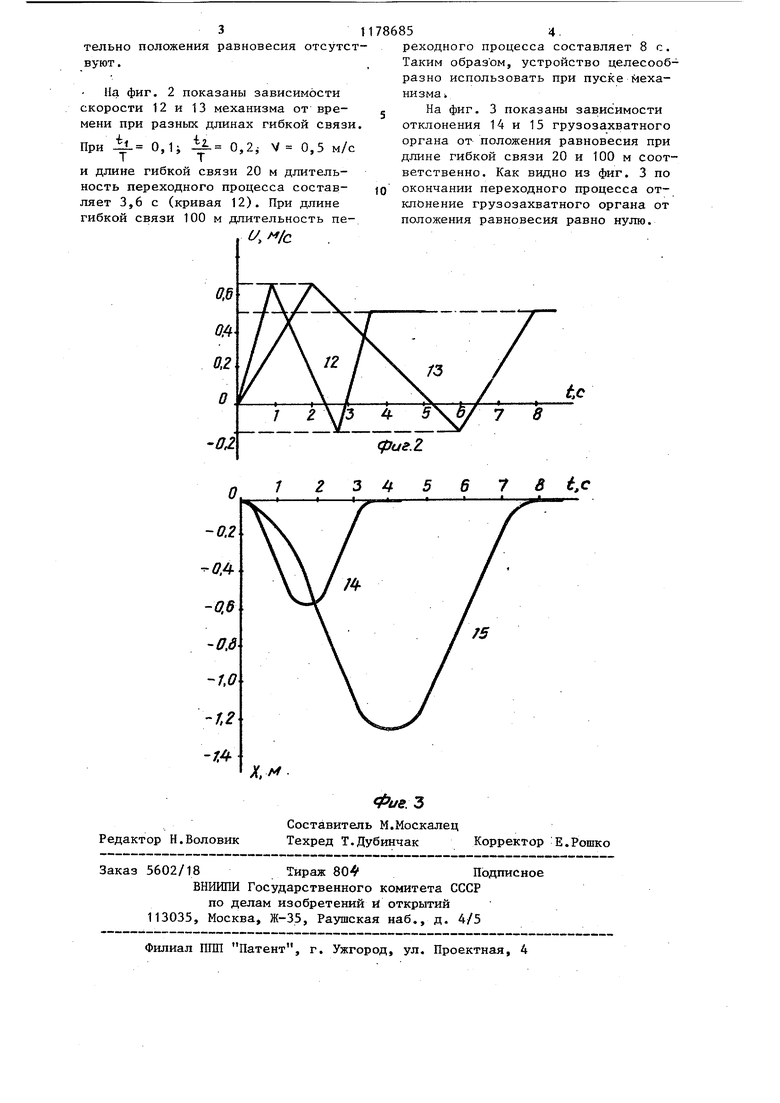
1 1 Изобретение относится к подъемно транспортному оборудованию, а именно к устройствам для управления механизмами горизонтального перемещения подвешенных на гибких связях грузозахватных органов, и может быть использовано в грузоподъемных механизмах, где требуется демпфирование колебаний грузозахватного органа. Цель изобретения - повышение надежности устройства. На фиг. 1 изображена функциональ ная схема устройства для управления механизмом горизонтального перемещеНИН подвешенного на гибкой связи грузозахватного органа; на фиг. 2 зависимость скорости механизма от времени; на фиг. 3 - зависимость отклонения грузозахватного органа от положения равновесия от времени. . Устройство для управления- механи мом горизонтального перемещения подвешенного на гибкой связи грузозахватного органа содержит командоаппарат 1, подключенньй к входу блока 2 определения частоты свободных колебаний грузозахватного органа, представляющего собой последователь но соединенные датчик длины гибкой связи и блок деления (не показаны), и управляющему входу переключателя 3. Блок через ключи 4 и 5 связан с входами 6 и 7 интегратора 8, выход которого соединен с входом блока 9 управления приводом механизма и вхо дом схемы 10 сравнения, другой вход которой подключен к выходу блока 11 задания промежуточных скоростей механизма, а .выход - к управляющему входу переключателя 3, выходы переключателя 3 соединены с управляющим входами ключей 4 и 5. Устройство для управления механизмом горизонтального перемещения подвешенного на-- гибкой связи грузозахватного органа работает следующи образом. Для подавления колебаний грузозахватного органа, обусловленного разгоном механизма, разгон механизма осуществляют на трех временных интервалах, на каждом из которых ускорение механизма постоянно. При подаче сигнала от командоаппарата 1 происходит фиксация текущего значения длины гибкой связи, при этом на выходе датчика появляется сигнал, пропорциональный чайтоте свободных колебаний грузоза сватного органа. По сигналу командоаппарата 1 переключатель 3 подает команду на замыкание ключа 4, при этом блок 2 подключается к входу 6 интегратора 8, коэффициент усиления которого определяется расчетной формулой К.Ч.-Г-.-::- ; (1 V - конечная скорость механизма;е.Дгпервый и второй временные интервалы период собственных колебаний грузозахватного органа.. . tV „ . 2 Отношения выбираются при Т Т наладке устройства. Сигнал с выхода интегратора 8 поступает в блок 9 управления приводом механизма и на вход схемы 10 сравнения, на другой вход которой поступают сигналы от блока 11 задания промежуточных скоростей механизма. По сигналу схемы 10 (при достижении механизмом первой промежуточной скорости переключатель 3 подает команду на размыкание ключа 4 и замыка- ние ключа 5, при этом коэффициент усиления интегратора 8 равен )л При достижении механизмом второй . промежуточной скорости схема 10 сравнения подает очередную команду переключателю 3, при этом размыкается ключ 5 и за.мыкается ключ 4, коэффициент усиления интегратора снова равен К. При достижении механизмом конечной скорости по сигналу схемы 10 переключатель 3 размыкает ключи 4 и 5, при этом механизм движется с установившейся скоростью, а колебания грузозахватного, органа относи3тельно положения равновесия отсутст вуют . На фиг. 2 показаны зависимости скорости 12 и 13 механизма от времени при разных длинах гибкой связи При il- 0,U 0,2 V 0,5 м/с и длине гибкой связи 20 м длительность переходного процесса составляет 3,6 с (кривая 12). При длине гибкой связи 100 м длительность пе,/С 854. реходного процесса составляет 8 с. Таким образом, устройство целесообразно использовать при пуске механизмаНа фиг. 3 показаны зависимости отклонения 14 и 15 грузозахватного органа от положения равновесия при длине гибкой связи 20 и 100 м соответственно. Как видно из фиг. 3 по окончании переходного процесса отклонение грузозахватного органа от положения равновесия равно нулю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом передвижения подвешенного на гибкой связи грузозахватного органа | 1979 |
|
SU982300A1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Способ управления механизмом передвижения подвешенного на канате груза | 1987 |
|
SU1472417A1 |
| Устройство для управления электроприводом горизонтального перемещения груза на гибком подвесе | 1987 |
|
SU1528719A1 |
| Способ гашения колебаний груза и устройство для его осуществления | 1989 |
|
SU1801923A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| Устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза | 1981 |
|
SU1017655A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ .МЕХАНИЗМОМ ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ ГРУЗОЗАХВАТНОГО ОРГАНА, содержащее интегратор, выход которого подключен к входу блока управления приводом механизма, датчикдлины гибкой связи, командоаппарат и переключатель, отличающееся тем, что, с целью повышения надежности, оно снабжено блоком деления, вход которого подключен к выходу датчика длины гибкой связи, ключами, информационные входы которых подсоединены к выходу блока деления, а выходы - к соответствующим входам интегратора, схемой сравнения, один вход которой соединен с вызюдом интегратора, а выход - с одним управляющим входом переключателя, выходы которого подключены к управляюгшм входам соответствующих ключей и блоком задания прбмежуточных скорос(Л тей механизма, выход которого соединен с другим входом схемы сравнения, с причем выход командоаппарата подключен к входу датчика длины гибкой : связи и другому управдянщему входу переключателя.
| Патент США № 3921818, кл | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
