Изобретение относится к подъемно- транспортным приводам.
Известен способ управления механизмом передвижения подвижного каната груза, основанный на последовательном изменении скорости на трех временных интервалах по линейным законам.
Недостаток известного способа связан с невысокой эксплуатационной надежностью при одновременной работе механизмов передвижения и подъема груза.
Целью изобретения является повышение надежности работы благодаря полному устранению контакта груза при совмещении операции горизонтального перемещения и подъема груза.
Для этого в способе управления механизмом передвижения на канате груза согласно которому осуществляют последовательно рззюн мехлнизмя передвижения на трех временных интервалах от начальной до заданной конечной скорости путем воздействия на него силой и определяют амплитуду силы сопротивления движению и массу груза, дополнительно измеряют длину каната и определяют длительности каждого из временных интервалов согласно формулам
ti 13 2 ж - Vmi/2 (mi +
t2 (V2-Vi)/2a-ti.
где Vi, Va - начальная и заданная конечная скорость механизма,
а - половина заданного ускорения на втором интервале,
mi, т. массы механизма передвиже ния и груза,
I длина канат.
IVJ
чэ
Jiw 00 ( СЛ
причем амплитуду воздействующей силы на временных интервалах определяют по расчетным формулам
Fi - 1/2 (Fm - Fc) (1 + cos - t) + Fc.
F2 2a(mi + ma) + Fc,
ж
Рз 1 /2 (Fm - Fc) 1 + COS -g- (ti - t2) + Fc,
где Fm, Fc - наибольшее допустимое усилие и сила сопротивления движению,
t-текущее время,
Период вынужденных колебаний соответствует расчетному соотношению
/TV
То - 2 п г
mi
О)
g 2 (mi + ГП2 )
Рассчитываются максимально возможное для данного механизма ускорение
2а
Fm -Fc
(2)
mi + гп2 и минимальное время переходного процесса
управление скоростью механизма передвижения осуществляется на трех временных интервалах.
На первом и третьем интервалах длительностью То/2 скорость изменяется по законам
Vwi-Vi + at+f (.ЗД l-gJ)sin ДД-t.
у I о У1
Ј ( ДД- g ID
2л:
(4)
На втором интервале длительностью
t2 to То/2
(7)
ускорение механизма поддерживается постоянным и равным величине 2а, воздействующая на механизм сила задается постоянной и равной величине F2 2а (mi +
+ ГП2) + Fc,
Наличием гармонической составляющей в законах изменения скорости на первом и третьем интервалах обеспечивается длительность переходного процесса
tnn to + То/2,
(8)
а
3)
30
их
иаменьшая, чем в известном изобретении (1) (где tnn to + Т/2), так как период вынужден- 20 ных колебаний То меньше периода соответственных колебаний груза.
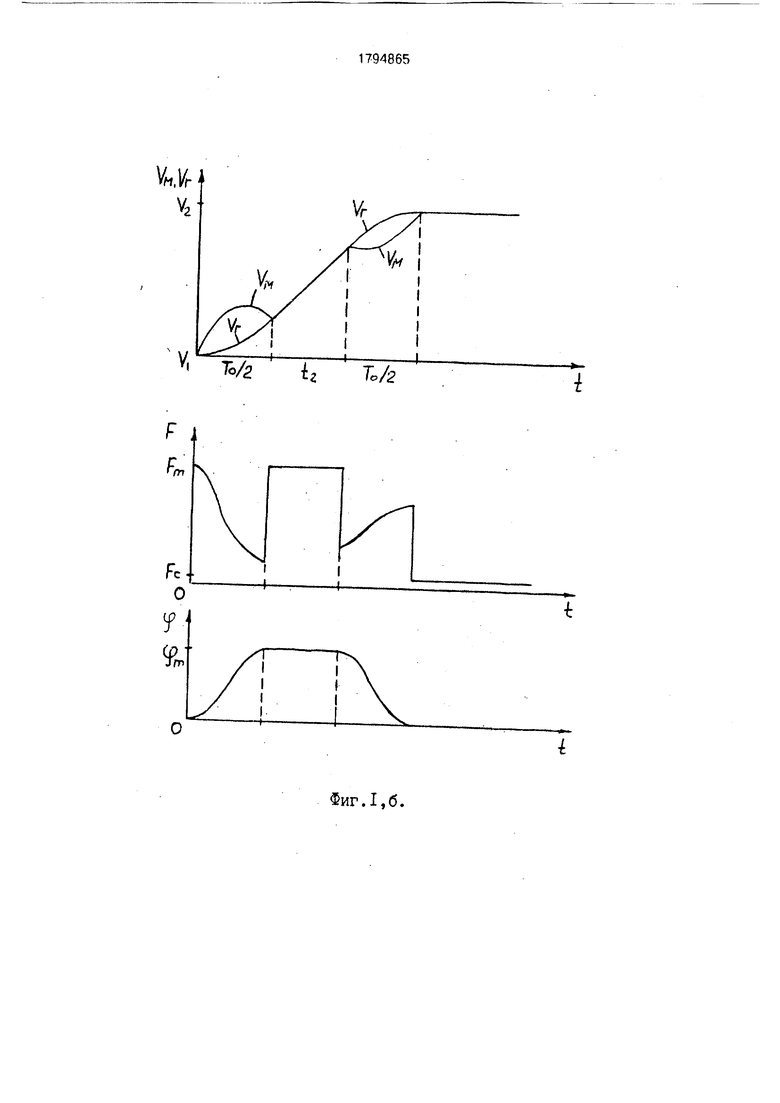
При одновременной работе механизмов горизонтального перемещения и подъема груза также обеспечивается 25 демпфирование колебаний, так как амплитуда гармонической составляющей скорости изменяется в соответствии с длиной каната (период То сохраняется постоянным и соответствует начальному значению I).
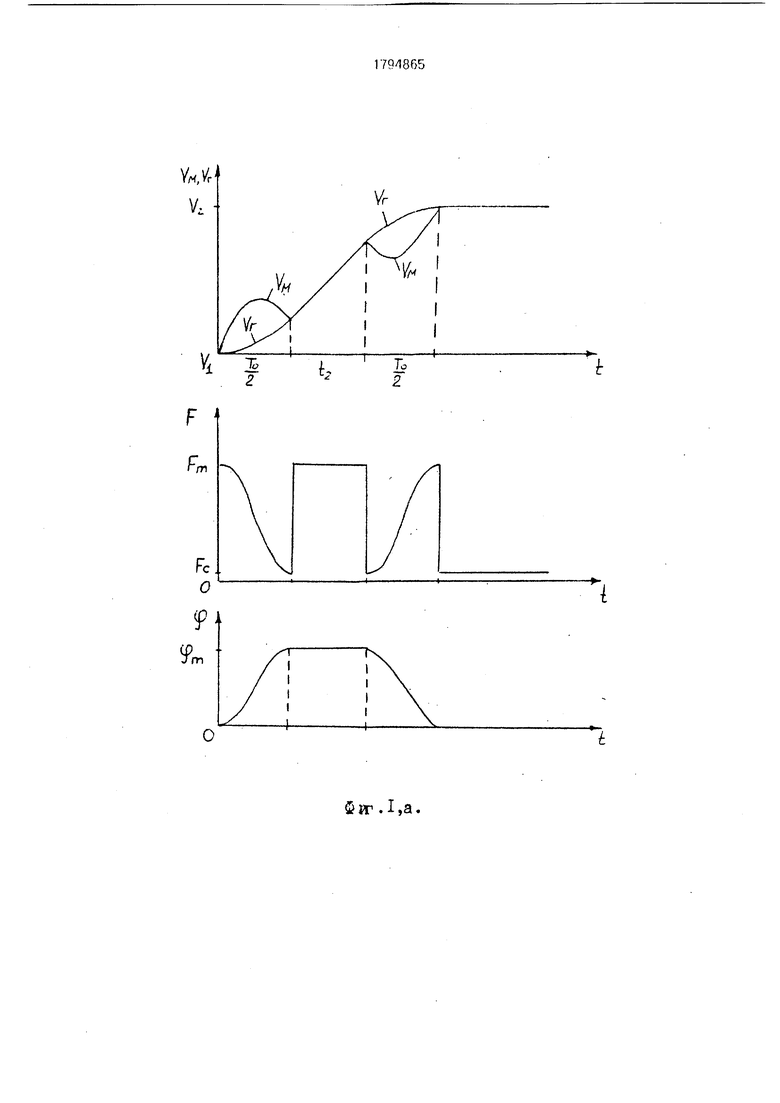
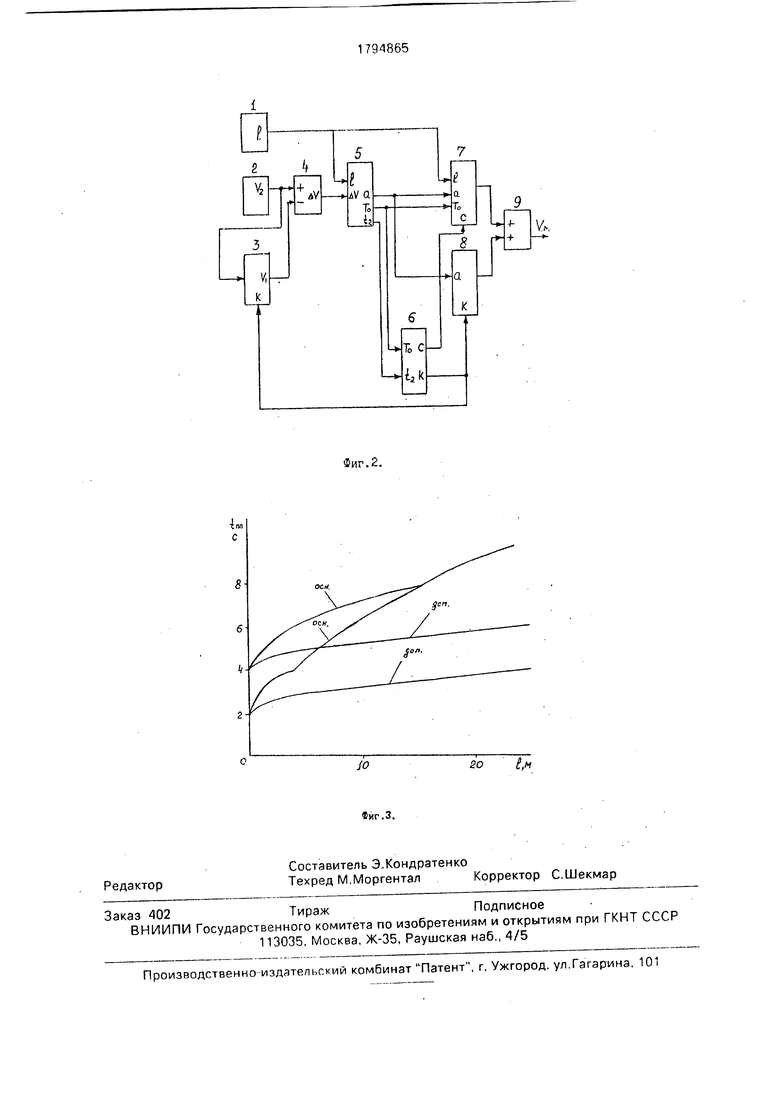
На фиг. 1 показаны диаграммы скоростей механизма VM и груза Vr, движущей силы F и угла отклонения каната от вертикали р при формировании переходного процесса с неизменной длиной каната (а) и с ее уменьшением во время разгона механизма передвижения (б), на фиг. 2 - функциональная схема устройства, реализующего заявляемый способ, на фиг. 3 - зависимости времени переходных процессов от длины каната в известном и настоящем изобретениях.
Переходный процесс механизма пере движения описывается дифференциальным уравнением второго порядка, которое относительно угла р имеет вид
35
40
45


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления механизмом передвижения подвешенного на канате груза | 1987 |
|
SU1472417A1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| Устройство для управления механизмом передвижения подвешенного на гибкой связи грузозахватного органа | 1979 |
|
SU982300A1 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| Способ измерения частоты переменного напряжения и устройство для его осуществления | 1991 |
|
SU1780036A1 |
| Способ управления грузовой тележкой с грузозахватным органом на гибком подвесе | 1988 |
|
SU1564102A1 |
| Способ измерения ускорения | 1991 |
|
SU1774267A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
| Устройство для измерения амплитуды и фазы низкочастотного гармонического сигнала | 1988 |
|
SU1684712A1 |
| Задающее устройство для электропривода | 1975 |
|
SU606195A1 |
Использование: подъемно-транспортные средства, управление механизмами горизонтального перемещения козловых и мостовых кранов, механизмами поворота портальных, башенных самоходных кранов. Сущность изобретения: для повышения надежности демпфирования колебаний груза при совмещении операций горизонтального перемещения и подъема, повышения быстродействия изменяют скорость механизма в течение трех временных интервалов, причем на первом и третьем интервалах длительностью полупериода вынужденных колебаний амплитуды гармонических составляющих движущей силы и скорости механизма зависят от длины каната. 3 ил.
за счет воздействия на механизм силы, изменяющейся в соответствии с зависимостями50
2ж
Fi a(mi + тз)(1 - cos t) + ami l/g
I о
t + Fc,
(5)
2лF3 a(mi + rri2)1 - cos
I о
( 2 я )2 CQS 2л (u .. ta) t
I о о
1ОР + Й,П11
g d t2
9
,(9)
где ам (t) - ускорение механизма передвиже ния.
Решение уравнения (9) при управлении скоростью VM по закону (3) и нулевых началь ных условиях (f (0) 0, р (0) 0 опреде ляется по формулам:
tp a/g(1 -cos -- t),(10)
I о
V, Vi + a(t 2л
sin. 2 t). I о
Если длительность периода вынужденных колебаний То рассчитывается по формуле (1), то тогда амплитуда воздействующей силы не превышает FM, а время переходного процесса становится минимальным.
В момент времени ta T0/2 (начало второго этапа) угол отклонения каната макси- мальный р т 2а/д, а скорости механизма и груза равны VM Vr Vi + аТ0/2. Задаваясь величиной, воздействующей на механизм силы F2 FM 2а (mi + ma)-+ Fc, на втором интервале скорости VM и Vr изменяются с постоянным ускорением 2а. Угол отклонения каната остается неизменным. В момент времени ta + T0/2 начинается третий этап, когда скорость механизма изменяется по закону (4). Величина воздействующей силы рассчитывается по формуле(6), а изменение угла отклонения каната и скорости груза определяется по соответствующим зависимостям первого интервала (10), (11).
При t tnn 12 + То угол отклонения 0, скорости механизма и груза становятся равными конечной заданной скорости Va Vi + +2at2 + аТ0, а колебания отсутствуют. Функциональная схема устройства, реализующего заявляемый способ управления скорости механизма горизонтального перемещения, изображена на фиг. 2.
Устройство включает в себя датчик длины каната (ДД) 1, выход которого подключен ко входам I арифметического устройства (АУ) 5 и управляемого генератора синусоидальных колебаний (Г) 7, командоаппарат (КА) 2, выход которого подключен к информационному входу запоминающего устройства (ЗУ) 3 и прямому входу сумматора 4, к инверсному входу которого присоединен выход ЗУ. Выход сумматора 4 подключен ко входу А V АУ. Выход а арифметического устройства присоединен ко входам а генератора 7 и интегратора 8. Сигнал АУ То поступает на соответствующий вход блока 7 и вход таймера с логическим устройством (ТЛУ) 6, на второй вход которого поступает сигнал ta с выхода АУ. Выход С логического устройства управляет работой генератора 7, а выход К -- работой интегратора и запоминающего устройства. Выходы генератора 7 и интегратора 8 подключены к сумматору 9, с выхода которого снимается сигнал, пропорциональный скорости VM. Выход сумматора 9 подключается к заданному входу известных систем регулирования скорости приводов постоянного и переменного тока.
5
1015 20 2530
35 4045 50 55Устройство работает следующим образом.
В начальный момент времени сигналы ЗУ и КА равны. На выходах сумматора 4, АУ и генератора сигналы равны нулю. Напряжения на выходе интегратора и сумматора соответствуют начальной скорости VL При переводе рукоятки КА в новое положение появляется сигнал Д V, пропорциональный разности Va - VL АУ рассчитывает параметры переходного процесса а, Т0, ta и выдает соответствующие сигналы на входы генератора 7, интегратора 8 и таймера 6. На выходе С ТЛУ появляется сигнал разрешающий работу генератора 7. Генератор вырабатывает синусоидальный сигнал с частотой 1 /То и амплитудой, зависящей от длины каната, ускорения а и периода Т0. Логический сигнал К такой, что интегратор формирует линейно изменяющееся напряжение, соответствующей ускорению а. Через время То/2 сигнал С останавливает работу генератора, а сигнал К переключает интегратор в режим формирования сигнала с ускорением 2а. Через время ta сигналы С и К становятся такими же, как на первом интервале, генератор формирует второй полупериод колебаний, интегратор изменяет задающий сигнал с темпом, соответствующим ускорению а. В течение всего времени переходного процесса блок 9 суммирует сигналы генератора и интегратора. В момент времени t Т0 + ta сигнал С останавливает работу генератора, а сигнал К отключает вход интегратора и инициирует запись нового значения Va в запоминающее устройство. На выходе ЗУ появляется сигнал, соответствующий скорости Va. на выходах сумматора 4 и арифметического устройства 5 появляются нулевые сигналы. Нулевой сигнал на выходе Т0 арифметического устройства переводит таймер 6 в исходное состояние. Схема подготовлена к новому циклу работы.
Устройство с принципиальной схемой, приведенной на фиг. 2, осуществляет пуск, реверс, торможение и переход с одной скорости на другую.
Технико-экономическая эффективности изобретения выражается в сокращении времени переходных процессов и возможности совмещения операций горизонтального перемещения и подъема груза.
Сопоставление способов управления показывает, что в 1 время переходного процесса
tnn
; to + п Vl/g при to я Vi/g
( 2 я Vl/gпри to л Vl/g .
в настоящем изобретении:
tnn
to + То/2 при to To/2 То при t0 То/2
(
i .( iL±lll+ Vl7i при К 16м 1Mm
tnn- /
I 2л-1
10
Ib
g Щ м +ТУ
tnn
Д/gпри I 16м, в заявленном способе:
Г V
«н(м +lr) .I
tnn -Чг +я 4 + 0,41 rVf7g
При пуске на промежуточную скорость 15 , На фиг. 3 показаны зависимости tnn от Ш2 05 о, „ получаем соответственно дл э™ ДВУ слУчаев- .ПРИ каната от 4 до 30 м заявляемый способ обеспечивает сокращение времени переходных процессов на 1-6 с, т.е. повышает 20 быстродействие на 20-60%.
2 + 0,41 TrVl/g при I 25 м 0,82 TrVITcf при О 25м
2 + л vT/cf
tnn
L 27rVl7cf
при I 4 м при 4м
Формула изобретения Способ управления механизмом передвижения подвешенного на канате груза, согласно которому осуществляют последовательно разгон механизма передвижения на трех временных интервалах от начальной до заданной конечной скорости путем воздействия на него силой и определяют амплитуду силы сопротивления движению и массу груза, отличающийся тем, что, с целью повышения надежности, измеряют длину каната и определяют длительности каждого из временных интервалов согласно формулам ti т.3 2 пvT/g vrni/2 (mi + тг )
t2 (V2- Vi)/2a-ti,
где Vt. V2 - начальная и заданная конечная скорости механизма;
Например, для механизма поворота крана Ganz грузоподъемностью 25 т, который характеризуется следующими параметрами (приведенными к валу двигателя м 12 кг , м , г 20 кг . м2 (соответствует номинальному режиму работы), а) н 100 рад/с, Мт 800 Н м, максимальная длина каната I 30 м, при пуске на номинальную скорость в (1):
10
tnn
2 + 0,41 TrVl/g при I 25 м 0,82 TrVITcf при О 25м
а - половина заданного ускорения на втором интервале;
ггп, ma - массы механизма передвижения и груза;
I -длина каната,
причем амплитуду воздействующей силы на временных интервалах определяют по расчетным формулам
FI 1 /2 (Fm - FcX1 + cos - t) + Fc,
F2 2a (mi + m2) + Fc,
F3 1/2 (Fm - Fc) 1 + cos (t - t2) + Fc,
где Fm, Fc - наибольшее допустимое усилие и сила сопротивления движению; t - текущее время.
Fc. 0
Фиг Л,а.
| Способ управления механизмом передвижения подвешенного на канате груза | 1987 |
|
SU1472417A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
