В известных устройствах ; диумя следящими подачами переключение иаиравления иодач в электрокоимрсщальных станках производится щ учную.
Особенностью предлагаемого устройства является нолучеиие вращающегося вектора силы для при.ж,атия пальг1а щуна к контуру копира с помощью электромагниTOIB, подключеииых к следящим каналам, чем сбеспсчивается обратное; иоздействие следящего канала на с;(едящий орга}{ - щуп.
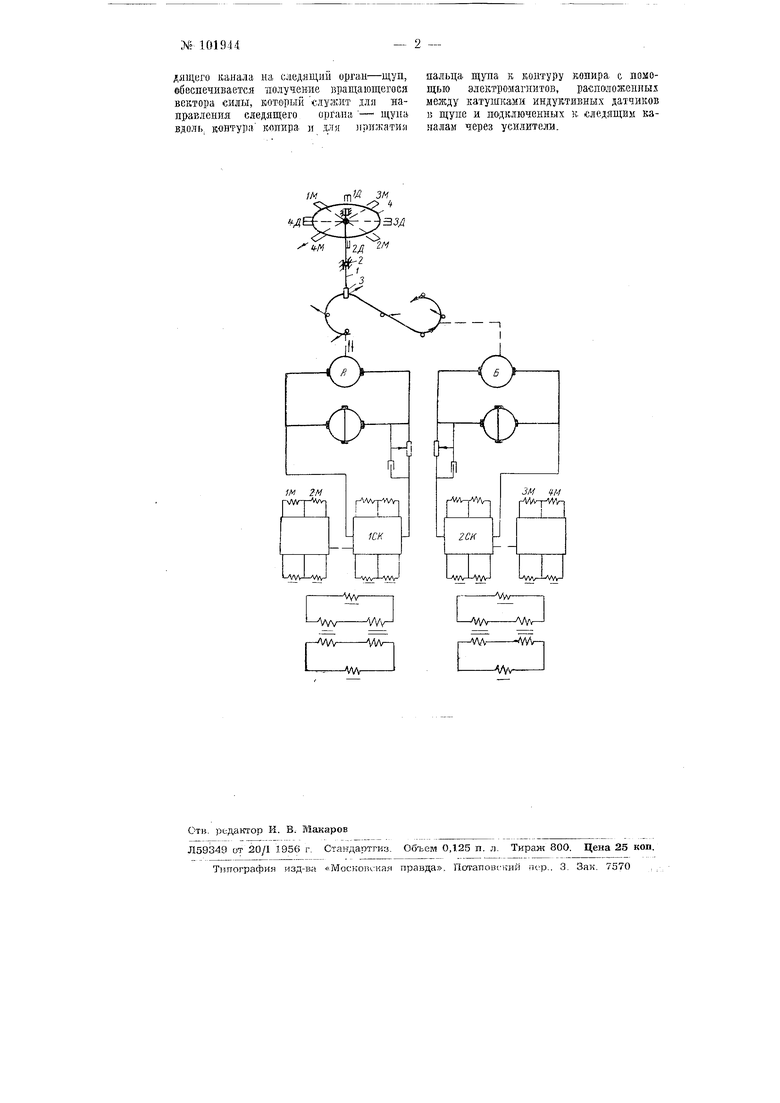
На чертеже схематически показано устройство, состоящее из датчика и 1вух следящих каналов.
Ось (1) датчика качается вокруг оиоры (2). На иижпем коппе «си креиится палец п(упа (3), а па верхнем ее конце укреилен кольпеойразный якорь (4). Вокруг ;;олы(еобраз1гого як(Я)я установлены четыре 1 нду1;тп1жых датчика (1Д), (2Д), (ЗД) и (4Д), которые у)) первый и вторьо следящими каналами.
Между катуп1ками инду1;тивпь х датчир;ов CD с.метцепием на 45° расположены чстыг/е электромагпитп (1М), (2М), (ЗМ) и (4М). .
Если отсутс вует контакт между пальцем и(упа () и контурОМ копира к якор (4) отк.лонен к датчику (1Д). то чере;, следящий капал (1СК) включается электромагнит (1М) и притягивает якорь (4) к датчика( (Д) и {4Д). П1)и этом от датчика (4Д) через следящий канал (2СК) включается электрома141ит (4М), который притягивает якорь (4) к датчикам
{4Д) и (2Д). Тогда от датчика (2Д) черен следящий капал (1СК) включается электромагнит (2М), ко1торый, в свою ОЧередь, ирнтягивает якор (4) к датчикам (2Д) и (ЗД) и т. д. Этим обеспечивается получепне вращающегося вектора силы, который будет поочередно отклонять якорь (4) к датчикам (1Д). (2Д), (ЗД) п (4Д), его против часовой стрелки.
В момепт сонрИ1;о:;но ения пальпа П(упа (3) с контуром Koinrpa ран(ение прекращается. При итОМ датчики через с.ледящии канал (1СК) и (2C4t) задают гакие ск-Орости электродвигателям (А) и (Ь), что результирующая подача направлена вдоль контура копира, а результирующее дейс.ттге от включенных магнитов будет всегда направлено 1()Д углом 4Гг i; т)аектории движения и при;кимает палец н;уиа (3) к копиру, чем и осуществляется авТОмалИЧ(х;кий 1;бход контура.
Изменение направления Обходн коптура достигается изменением чередовазгия сердечников п электромп.гннтов но окружпости я.соря.
и л II Г| || ( г ( к | II
II р е д м
Устройство для а)том 1тизации
KUHJypэлектроириво-де, KOHHJIOно-го слежения в состоящее из двух c/ieвальных станков, командными имнульг.адящих 1:. с .ми благодаря центральному рассо-гласоватем, что с. нию, отличающее с я
целью автоматизации контурного слежения на замкнутом юонтуре применением обратного -воздействия импульсов из слс f, канала на следящий орган-щуп, обеепечивается получение вращающегося вектора силы, кот о-рый служит для направления следящего opraiui- щупа вдоль, контура вонира и д.ля нрижати.я пальца щупа к контуру копира с помощыо электромагнитов, расположенных между катушгами индуктивных датчиков в щупе и подключенных к следящим каналам через усилитем.
№ т зм
r- vvvw
L,--wv
,
IvVv1
