1
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для автоматического управления самоходной сельскохозяйственной машиной.
Известно устройство для автовол дения самоходной сельскохозяйственной машиной, включаюш,ее основной контур регулирования с датчиком отклонения машины, связанным через рычажную систему с гидрораспределителем и гидроцилиндром поворота управляемых колес 1.
Недостатком известного устройства является наличие автоколебаний, вызваииых рядом факторов, в том числе конструктивными особенностями гидрораспределителя. Такие системы автовождения обладают только возможностью не реагировать на мелкие искривления контрастного следа, ири которых шток гидрорасиределителя перемеш,ается виутри корпуса в пределах зоны нечувствительности. Поэтому точность автовождения у известных систем невысокая, что выражается в низком качестве выполнения технологических операций, например в значительных потерях при уборке сахарной свеклы.
Известно также устройство для автоматического управления самоходной сельскохозяйственной машиной, содержаш,ее основной контур регулирования с датчиком отклонения машины, связанным через рычажную систему с гидрораспределителем и гидроцилиндром поворота управляемых колес 2.
Однако и для этого устройства характерно наличие существенно влияюш,их на точность автовождения автоколебаний. При этом их амплитуды находятся в прямой зависимости от величины зоны нечувствительности гидрораспределителя: с увеличением зоиы нечувствительности амплитуды возрастают, с уменьшением убывают. Точность автовождения таких систем невысокая, наиример, при уборке сахарной свеклы много корней остаются неподкопанными.
Цель изобретения - повышение точиости уиравления машииой.
Это достигается тем, что устройство сиабжено доиолиительиым контуром регулирования с датчиком рассогласования основного контура, заиоминаюш,им устройством, считываюшим элементом, усилителем,
преобразователем и суммируюш,им устройством, выход которого соединен с золотником гидрораспределителя основного контура.
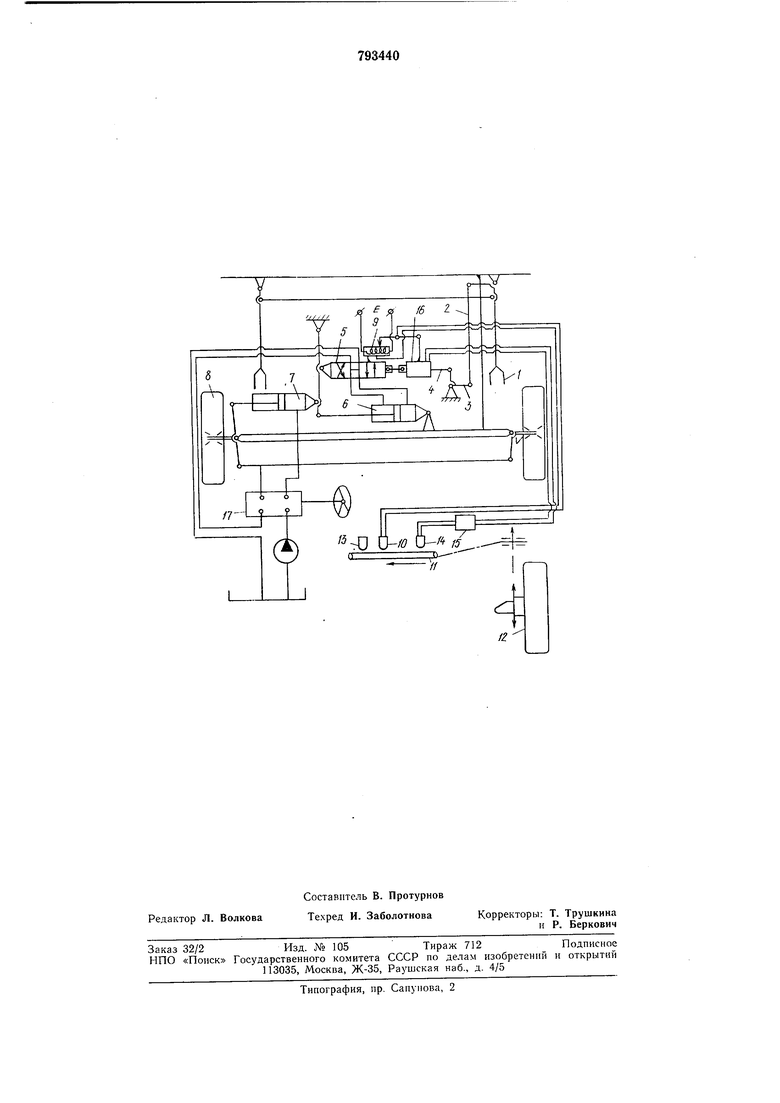
На чертеже изобралчена иринцнпиальная
схема устройства для автоматического управления самоходной сельскохозяйственной машиной. Устройство состоит из датчика - копирующих щуиов 1, рычажной системы 2, 6 и тяги 4 связи конирующнх ш,упов с гидрораспределителем о, силового цилиндра Ь, шток которого посредством рычажной системы связан с корпусом гидрораснределителя и через корректировочный цилиндр 7 с поворотной цанфой управляемого колеса 8. Эти элементы составляют основной контур регулирования. Кроме того, предлагаемая система имеет дополнительный контур регулирования, содержаи ий датчик величины рассогласования основного контура, например установленный на. корпусе гидрораснределителя потенциометрический датчик линейных перемеш,ений У, подвижные щетки которого механически связаны с тягой рычажной системы копирующих щупов. Сигнал от потенциометрического датчика 9 воспринимается запоминающим устройством, например записывается при помощи элемента 1и на бесконечную магнитную ленту 11 с механизмом привода от ходовых колес 12. Перед записью магнитная лента очищается при помощи элемента 13. Считывающий элемент 14 связан при помощи проводов через усилитель 15 с иреобразующ 1М электрический сигнал в перемещение золотника гидрораспределителн электромагнитом 16, например электромагнитом, который, будучи соединен корпусом с тягой рычажной системы копирующих щупов, а якорем с золотником гидрораспределителя, выполняет функции суммирующего устройства. Устройство имеет механизм ручного унравления 17. В работе при отклонении копирующих щупов i приходит в движение электромагнит 16, корпус которого соединен с тягой 4. Вместе с электромагнитом смещается и соединенный с его якорем золотник гидрораспределителя. Кроме того, за счет сигнала дополнительного контура якорь электромагнита 16, а соответственно и золотник гидрораспределителя 5 смещаются относительно корпуса электромагнита. При смещении золотника на величину зоны нечувствительности рабочая жидкость поступает в одну из полостей силового цилиндра 6, вызывая перемещение его штока, который через систему рычагов и корректировочный цилиндр 7 поворачивает управляемые колеса 8. Поворот колес 8 вызывает движение корпуса гидрораспределителя 5 в сторону смещения золотника и при достижении суммарной величиной рассогласования значения зоны нечувствительности (золотник смещен относительно корпуса гидрораснределителя на величину зоны нечувствительности) подача жидкости в силовой цилиндр прекращается. Величина смещения якоря электромагнита относительно его корпуса пропорциональна величине рассогласования основного контура в точке контрастного следа, удаленной-от концов копирующих щупов на расстояние, которое при выбранном передаточном отношении механизма привода магнитной ленты определяется расположением по ходу движения ленты считывающего устройства относительно записывающего и не зависит от скорости движения самоходной машины. При движении вдоль малоискривленного участка контрастного следа перед поворотом колес 8 якорь электромагнита 16 оказывается смеП1,енным относительно корпуса в сторону движения соединенного с тягой 4 корпуса электромагнита 16. Тем самым перед поворотом колес 8 (при смещении золотника на величину зоны нечувствительности) величина рассогласования основного контура - смещение корпуса электромагнита 16 относительно корпуса гидрораспределителя 5 - оказывается меньшей зоны нечувствительности на величину сигнала дополнительного контура - величину смещения якоря электромагнита 16 относительно корпуса, что вызывает уменьшение амплитуды автоколебаний, а следовательно, повышает точносто автовождения. Встречаюшиеся при этом мелкие высокочастотные искривления контрастного следа также за счет совпадения знаков сигналов основного и дополнительного контуров перед поворотом колес сглаживаются. При этом из-за несовпадения знаков сигналов устройство может не реагировать и на такие случайные возмущения контрастного следа, при которых сигнал рассогласования основного контура больше, чем зона нечувствительности золотника. . . Формула изобретения Устройство для автоматического управления самоходной сельскохозяйственной машиной, содержащее основной контур регулирования с датчиком отклонения машины, связанным через рычажную систему с гидрораспределителем и гидроцилиндром поворота управляемых колес, отличающееся тем, что, с целью повышения точности управления машиной, оно снабжено дополнительным контуром регулирования с датчиком рассогласования основного контура, запоминающим устройством, считывающим элементом, усилителем, преобразователем и суммирующим устройством, выход которого соединен с золотником гидрораспределителя основного контура. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 526304, кл. А 01В 69/04, 1976. 2. Авторское свидетельство СССР № 582779, кл. А 01В 69/04, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического вождения самоходной машины и устройство для его осуществления | 1989 |
|
SU1748682A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| Самоходный картофелеуборочный комбайн | 1986 |
|
SU1428249A1 |
| Самоходная сельскохозяйственная машина | 1984 |
|
SU1222220A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Устройство для управления самоходнойСЕльСКОХОзяйСТВЕННОй МАшиНОй | 1979 |
|
SU852207A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1505454A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1971 |
|
SU307764A1 |