Изобретенном является гидравлическая следящап система для объемного котирэванпя с одиовремскиым автоматическим прапленним по тром ллнеИньи и двум угловым координатам но заданному объемному копиру, военронзЕОДящему поверхность обрабатываемого язделнуа.
Известны способы и устройства коцированпя по двум координатам, обеспечпвашщир, обработку по плоскому контуру пздоли11, ограниченных замкнутой плоской кривой. Известны способы обработки по объемному коипру методом строчек - пприодическпх подач, прн которых ось (|Р(ЗЬ1 НС устанавливается нормаяг.ао к обрабатывасмпй поверхности.
Оппс1лваема11 система отличается от пзвестпых тем, что в гей прпмснеп 1 три доиолн П льных, нп завпсящнх от главного кои11рог,) па.ьцл, Hiyna, взанмодс |(тву1они Х с объемным копиром п управлпющнх золотниками гндронрнводов 1 ертикал1,11)11 подачи и механнзмов поворот: 1;опи1и Гм1лы1ой ГПЛ11ВКИ вокруг вертикально II горизонтальной осей. Это обеслечива1Т одновременное автоматическое упранлени но Т1)ем линейным п двум угловым координатам и обработку липейчатых paiii.ppTbiBaioHiHxrii поверхностей, ограниченных замкнутым коптуром с постопнпьпг и нгромрнным углами наклона к. базовой пл:1С1;огти, а также поверхнос.той двойно i;pni H3Hi i с устапопкой осп фрезы нормально к обрабатываемой по1ерхности.
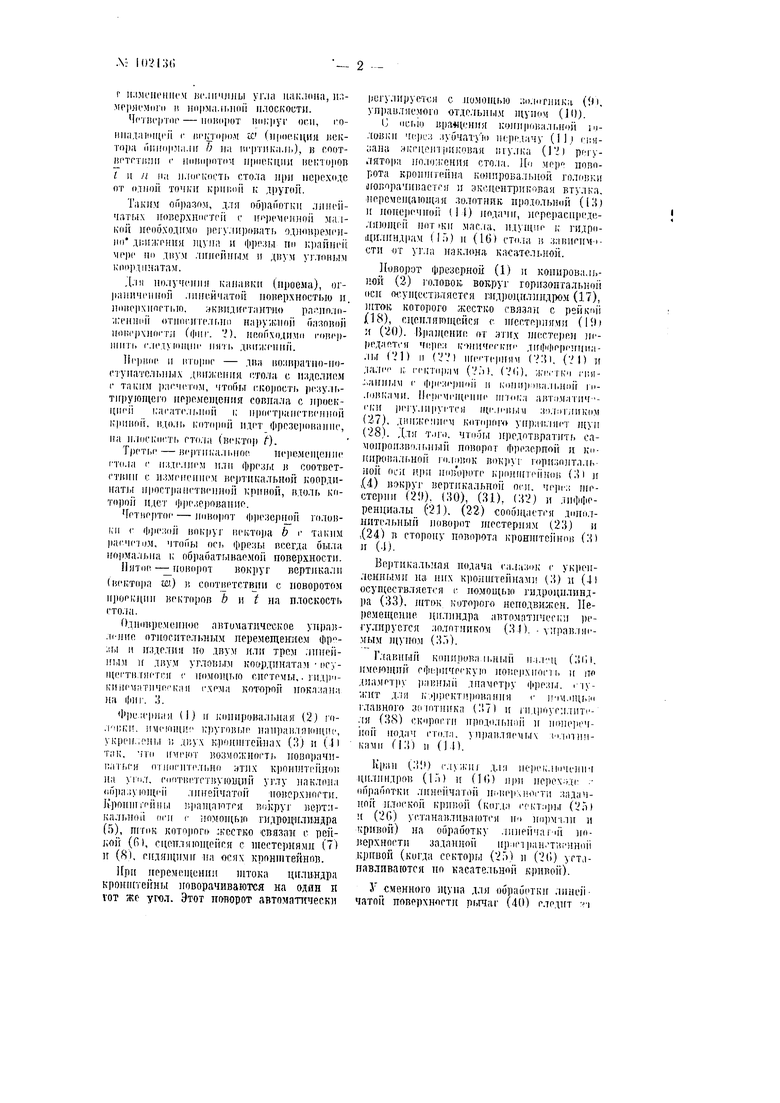
Иа фиг. 1 показана схема образования .гнпейчато шверхностп с направляюще в виде плоской замкнутой кривой; па фиг. 2 - схема образования линейчатой поверхпостп с направляющей в виде пространствеиной кривой; на фиг. 3 - гидрокпнематпческая схема системы; па фиг. 4 - поперечпый разрез сменного щуна для обработки линейчатой поверхлости с направляющей по замкнутой плоской кривой: па фиг. 5 - впд щупа ;6oi;y; на фиг. ( - вид по стрелке (Л) па фпг. 4; на фиг. 7 - июперечпый разрез сменного щупа для обработки линейчатой поверхпости по пространственной кривой; па фпг. 8 - разрез по (ЛБВГ) на фиг. 7.
Для обработки боковой лине11Чатой ж перхпостп пзделпя, ограничеппого двумя ллоскостямп, прпчем боковая образуюнщя имеет переменный, относительно плоскости стола, угол наклона (малку) (фнг. 1), пеобходимо, чтобы соверпгалнсь iM iyioн(пе четыре движения.
Иервое п второе - дна взаимно перпендикулярных перемещения стола с тем, чтобы скорость результирующего перемещения (и-продольноо + у-иоиеречпое) совпадала с направлением проекции касательпой в дапной точке па плоскость стола.
Третье - поворот фрезерпой головкп вокруг осп, совпада101цей с направлением касательной (вектор i), в соответствии
г ii.iMiiicuMcM lic.iiiuijibi yr.iii uiiK.Hiiiii, i;iM(4i itMiirii 11 nii|iMa.ii.iioii плоскоутп.
4(TB(|)Tiir - ii(iii(ii)OT niii, оси, IoпппданицгЛ 1 11гг)ом w (и|1(км;цня JscJCTopa miHn|iMii.iir /; iia Шртика.и,), li соот1)(тгт|1 111 с iiiiiiiipnToM iipiKKniiii Mei;TO ion Т 11 /; па ii.ioiKocTi, стола ирл переходе пт 1лпой топ.и Kpiiniiii i; друг(1Й.
Таким опрязом, для rxlpaмотки .liiiieiiч,1тых iioBCpxHiKTcit iriiJCMcioioii MU.IKdii )роб.оД1гмо )eiAMii)) ()(1111)ем(11lio дниження )uyiia н пи i;)) мере 110 дпум Л111геГпгг.1м ii Д1ПМ 1-.тон1)П1 1сои1)Д11натг1 г.
, получении кашииси (проема), огliaiiiiMiiiiiofi .шиейьчтой поиерхностыо и. iKiiiepNiincTi.m. якпндигтангш) рл.чшлп,i:ennitir отппсителг.ии napy.iviioii oa niioii 11оиг|))1Г1стл (фиг. Л. ие.оиходпмп гопс)1IIIITI, следукицм ичп, дп11;|;е111п |.
liiliiirie II торос - дна iioaFip iTiio-iio(тупате,ч1) диняпмпгн е/гола е плдп.шем таким расчетом, чтоОы c,i;ojjocTi i)e:iy.it.Т1Г1)ую1цсго 11е))еме1цепмя совпала с ироеиHiieii i;acaT(Mi,iioii i; iipncTpitiicTiiejiiioii i;|iiii)oii. ИДОЛ1, KoTopiiii пдгт (Iipeaepoiuiiiiie,
iia илосьиг.ть етол;| (neiCTnp }).
Т))етьг - )1)Т1п;ал1.1гое. T e iOMeineiiiie гтола с и;1Д1ллем или фре;л, л соотиетстиии с изменением вертикальной коордииатн HpoeTiiaiicTMeiinoii криной, вдоль кпTo)oii идет ||11)е,,е1)оваи110.
Четнертогиоворот (|i ie;iopiiof 1олоиi;ii с (|ijje:toji впкру )а b i- таким |iac,iie)i)M, чтоПы ось фрезы всегда была ио|1малы1а к oOiuioaTbiBaeMoii поверхности.
Пятое.- пово1)от вокруг вертикали (liCKTOjia ш) , соответствии с поворотом проекции векторов Ъ t на плоскость cTo.ia.
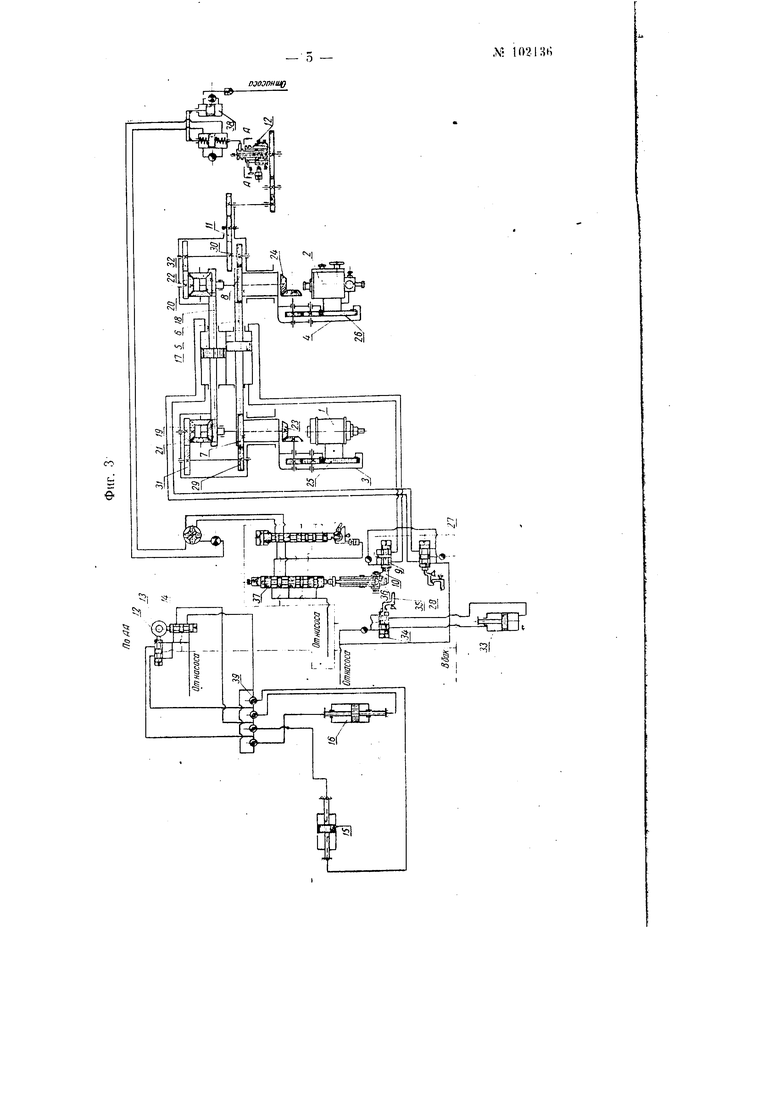
Г)дн1И1ремен1И)е автоматнческое yiipnii.и-иие относительным нереммцением .1)1 и изделии 1ГО нли Tpeii и двум угловым коардинатам есу|це1твляетс1Г с системы,. гидриКииематнческап схема которой показана на фнг. о.
Ф|)е;ериая (1) н 1;о11Ировалы ая (2) гоЛ |;1;и. имеюнще i;pyro u n наП1)а11ЛЯК11Ц1 с, укреи.,е111л i Д1;ух коюинггеНиах () и (Л тик, что имеют иозможнорт. новорачиватг.сн относительно ятнх крони Т1ч Нов на |11Л, (чшрштствующий углу наклона (1оразукпц|Г| Л1гиейчато| г новерхноспг. IipOHHirfiiiibi праньттотся вокруг вертлкальноГ| пек с iioMOHibio гндроцнлилдра (5), нгтик KOToiiori) .-.KecTKfl евязан е рейкой (fil, сиеплятн(ейея с шестернями (7) п (Sl, еид 1н{имн на осях кронттешюп.
При перемен(ении нпока цили«дра кро}ги тейны 1говорачиваются на один п VOT же угол. Этот поворот автоматически
регулируется с ломои1ыо зилигиика (f)i, уиравляемого отдельным Н1уиом (.Н)).
( осью вра)1еиия конироиальиой inловкн че1)сз зуочатую ш.едачу (И) С1;н;;ана икрцеш |ип;пвая вгулка (121 ргтулятора иолои;ения стола. Ич мер поворота кроин1тейиа ко1П1рОБал1,иой головни iiroiiopaiinsaeTCif и эксцент1)И ;овая втулка. 11еремен(а1ои1;и золотник продольной (1Н) н )1ечной (11) иодачи, иерерасиреде.ля)он1ей йот ки масла, ид И11|с i; гидро|Ц1Глиид|1ам (1Г|) и (l(j) и зав11си мсти от угла ){аклона. касательной.
Поворот фрезерной (1) и копировальной (2) 1оловок вокруг горизонтальной оси (ест)Г яетея гид))оц1гл11ндр)м (17), шток которого жестко связан с рейкпй Л8), сце11лп;ти1ейся игссте)П1ями (МИ и (20). BjiaineuHe от дтих 1иесте|)е)| JHредлется через К н11чсски1 диФфе НН1|иа.1ьг 121) II (221 игестериим (2. (21) и далее i;. пктпрам (2.)). (2(i), n.irrivii гвя,:.аИ11ы 1 с (|||1сз1Ч)||( ц к-опи) (иа.п.ной гм.. 11ерсм1|Цеи1И lirnii;;i авт;|Матич ii;il 111ЧУЛ11р 1ТС11 1Ц1Л1|1Ы 1 311Л:1ГЛ11КОМ
(27), движением K iTojior t угграв.ииТ щуп (28). Для Т.1Г.1. чтобы 1))едптврат1гтг, само)1роизв(1.1г,ный поворот Ф1)езерной и кпкирсшальной ro.iaiioK BOKIUI пфизонтл.п, ной OLU при ini)u)i)OTe KpojiiineiiHou ( и ,(4) liOKpyr вертикальной оси. через гиестсрии (2). CW), (31), (;Г2) и дифференциалы (2). (22) сообщается диполннтельиый иово1)от шестерню () и ,(24) в еторону поворота крони1те шо| (Х) п (.1).
Вертикальная иодача салазок с укреиЛСННЫМ1Г на них кронииейнами (;{) п (41 осуществляется г помощью гидродплпнд1)а (33). jiiTDK которого неподвижен. Иере.1ещенне цилиндра автомптнчес1,и регу;труегся золотником (34). . мгрпвля мым щупом (ЗГ)).
Главный коиирова и.ный ii.i.i-ц (MiJi. 1 ме10Н1ий сф|: 1И еску1о iioiiepxiiocii, и по диа.мет1П равньи диамет1)у i|ij)e3bi. ly,киг для 1;.1рект1 рования ичм.идын главного 3(1 ютника (37) и гид 1оус:1лит1.1Я (38) скорости иродольипй и нонеречiuiir иодач стола. yllpaвляe lЬI м.ьпнпками (13) II (14).
lipiiii (31)) (My;i;iii Д.И1 iie)ei;.iiii4einri цилнидров (ITi) и (()) при иерех.це . обработки лине1 1чатой И(11е1 : но1Т11 задачHoii глоской (ког.1а criniijibr (2Г1) н (20) устанавливаются iii 1гг1))м-1лн и кривой) на обработку .шнейчаг й нокерхности заданной 1ан/тв нно1 | .кривой (когда секторы (2Г)) и (2(1) устанавливаются по касательно крнво ().
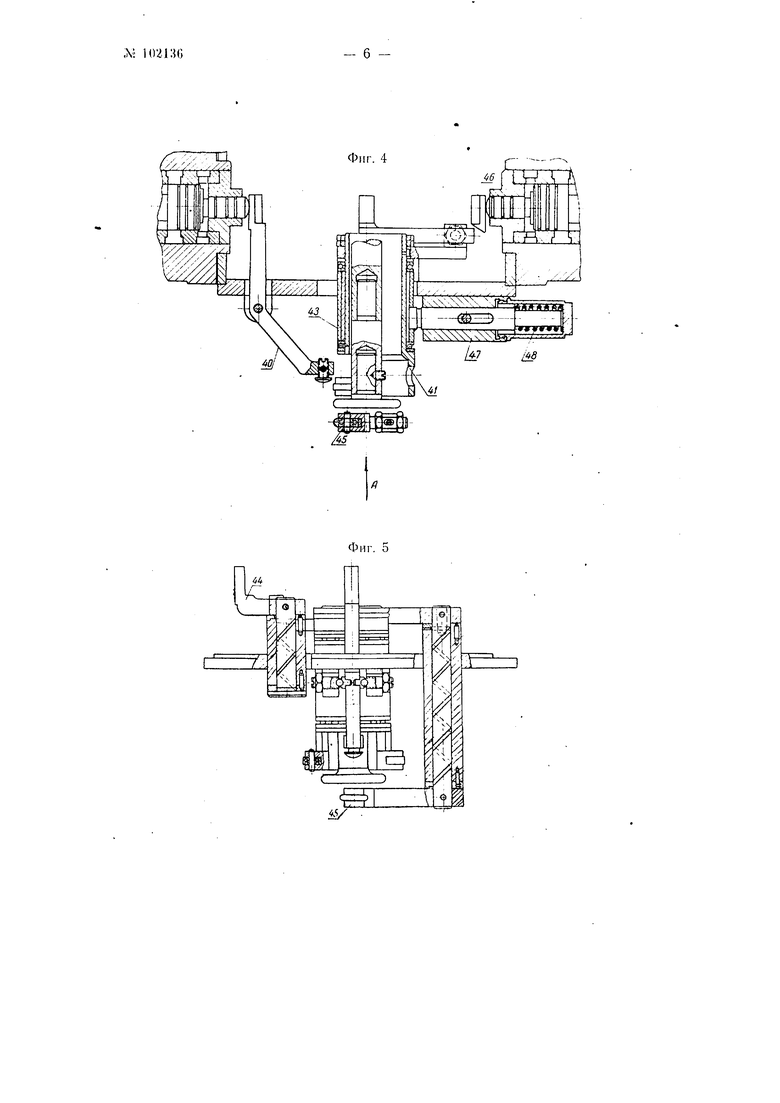
У сменного щупа для обработк г .линей чатой поверхпоет С рьшаг (40) елед1 т
1Ч1Д(П(;)топ. Рычаг (41) с голикммл (4Л (фагцлптся li «Cmhir ( н yiijiaii.TUPi чрррг рычаг (44) lio.cmiUKOM мсханплм; попорота )yr впртшиплмюи ncir. Рычаг (45) с ll)лик(r следит ла ii.niyiioniп raлl;lI и чгро. ))ычаг (4(1) iiopijacT сигнал :«)Лпт11.Г1;у Mi a nr;nia nnjioiioTa вокруг го))и:ял1талы 01 пси,
Omjinia (43j II.MPOT ifaiiiJaiMjiioiuuii fTcpa.iMEh, ne|)e.Mi4naioir(Hiicii n кплпдьс (47). 1Г|1Д действием TijiyanDii.t (4М) отигм,) {4п/ с ычаго г (11) при .ьимаспгя )io.iiii;aM i (4У) к копиру.
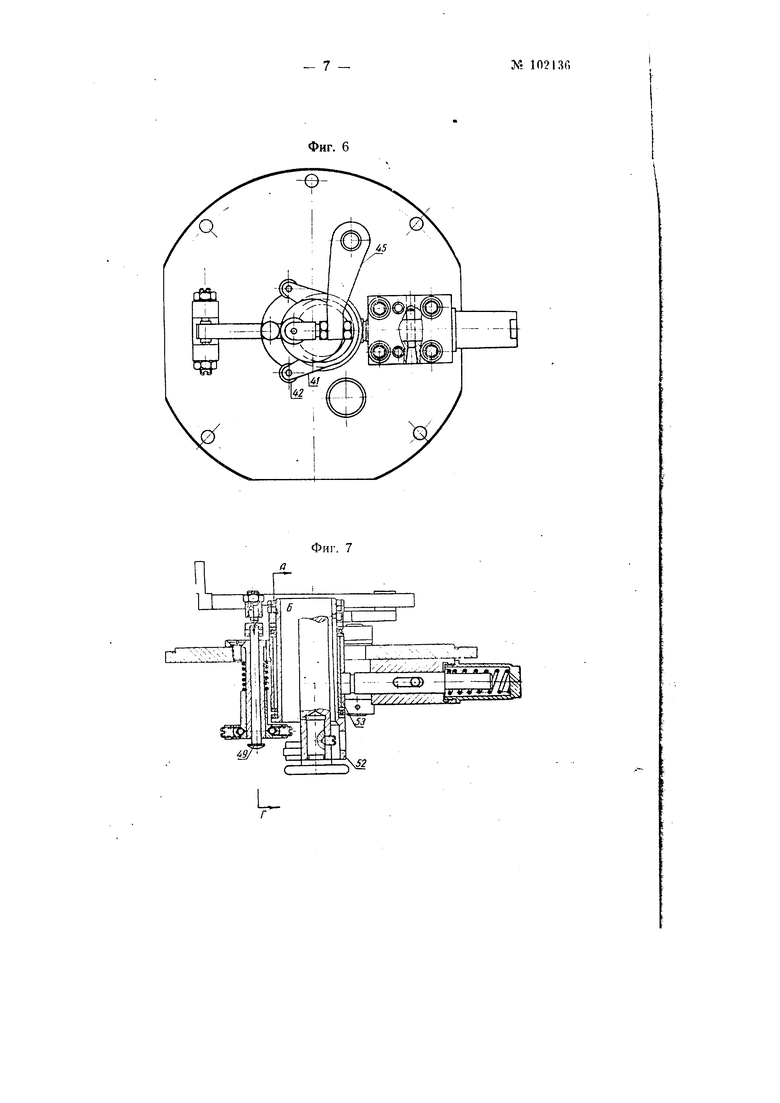
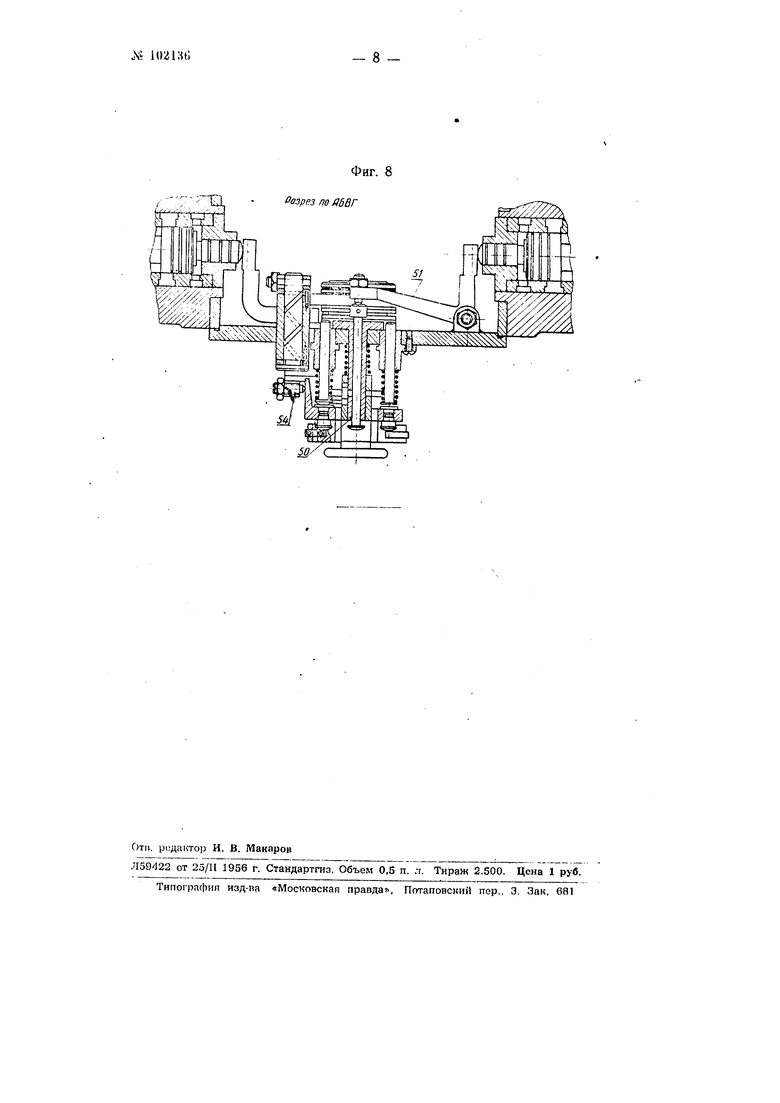
(мг.ины|г ШУИ ,iiif ofipauoTKJE лимсйчаTdii ii(iiiip H(icTii ио иростраиствсиной i, имеет иа.КЦ (4t)). ие.ре.мощаю1ЦИ|| Я ( irry.lKC (ЛО). С,)И1:1аИ1ГОЙ ЧС1№3
рычаг (Г)) .Ki.KiTiiiiKOM ж ртилпльно . Рычаг (5). иееуиом дпа ролям, .м();ке.т 1го орачи1 ат1,;г к оооймс (.к.). Oi кр.чнляет (Т1гик(1М ме.пии:п1а iitiiKipnla iinc)yi пертикалыки veir. Щуи, ири,|,-.имаю Ц11ис(Г i; иаружнуй .попер хиостн О (п,1 много копира двудпг nyroBKaMJf, служит для управления золотником )та гюкруг горизонтальной оси. Сигнал от .тогп И1упа iK золотнику 1гередается через рычаг (54).
II |) е д м е т и :i о и р е г е )( п ir
Гид1)ав.1ическа11 следяи1ая сиск-ма д.ш объемного копи1кшакия к кошфовалыюОфезериым стайкам, включающая 1Ч1дроироводы продольпой и поперечиой пидач, .11Л11ТИ11Ки кото)ых упра1 ляются .4КUeirTриковон втулко В : авие1птети от niuuiрота копировальиой головки. иес -1ЦМ1 (лавный зллоппгк со . с г.гавпг.1м ккиировальным иа.тг.цем. о г л и ч а м И1;ался тем. что. г целью иораооткн лилейчатых ра: 1 п|1тыг,ак)1иихся п&всрхностей, ограмичепрплч .ча гкиутыхг К1нту1 у г постояп11ы 1г 1геремениым у1мами гаилона к oa.ioBoi плоскости, (ррезой, ось i;oTOpoii находится в н 11П1аль)И1Й плоскост г, |1а|)а.1ле.1Ы1()й unpaiiyioincii, а иoi;ep.xF Ocтeй дпоЙ1 оп к|11гви.зиы, фрелой, мЬ которой постояили пормальиа к оо|1аб 1тываемой ловерхиости. i системе npitмепелЕЫ три дополтгительных. JH : а1 Ися1ЦИХ от г.таниого копировального пальца, щуиа, взаимодействующих с 01гг.ем)ым копиром и управляющих золотниками гид((ОПриводов вертикальной подачи и мехалнзмов поворота копировальной головки вокруг горизонтальной и вертикальной осей.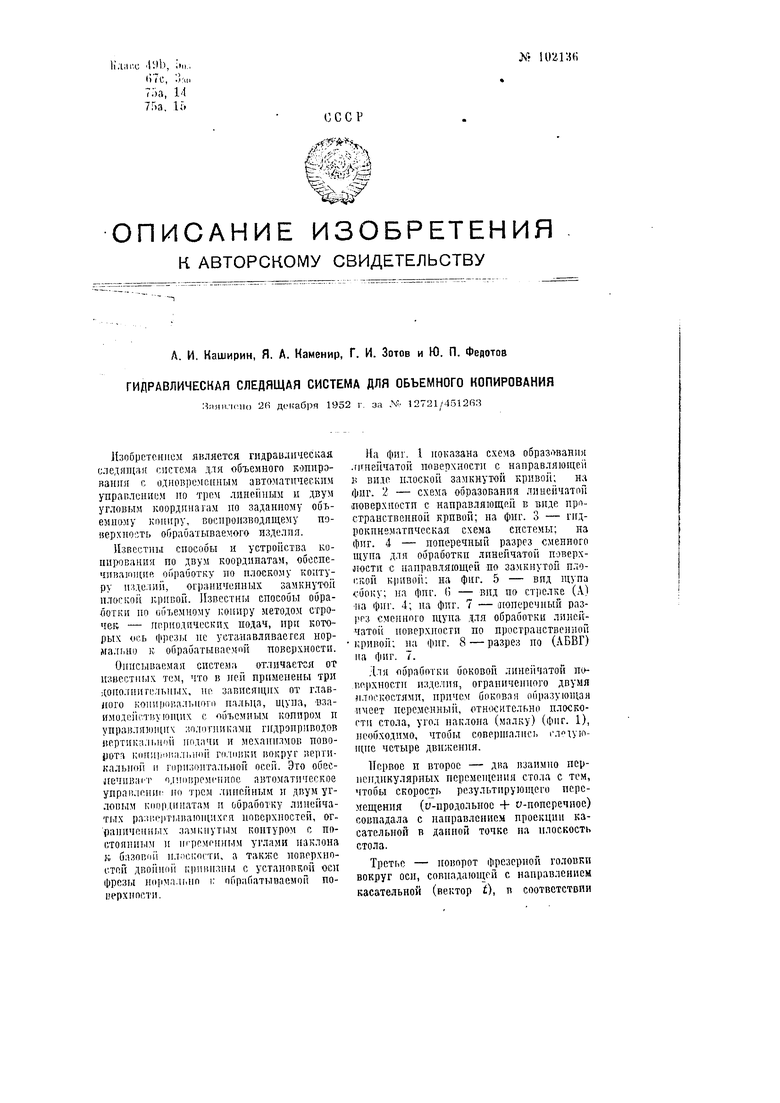
DOOMHIUQ
«/ .
Фиг. 7
)
ri
гз
Оазркз no ff6Br
Фиг. 8
