Изобретение отнсюится к дроблению материалов и предназначено для контроля и регулированияработы дро бящих установок и может быть исполь вано в горнорудной промышленности и промышленности строительных материэ лов.. Известен способ регулирования дробилки, реализованный в устройств регулирования производительности ще ковой дробилки, включающий изменение частоты подвижного элемента в зависимости от потребляемой дроби кой мощности таким образом, чтобы потребляемая дробилкой мощность поддерживалась около заданной Cl., Однако этот способ не позволяетстабилизировать гранулометрический состав продробленного материала в связи с тем что с увеличением прочности исходного материала мощность, потребляемая дробилкой, увеличиваетсяИ при ее значении, большем заданного , частота качаний подвижного элемента дробилки уменьшается , что приводит к увеличению крупности продробленного материала. С уменьшением же прочности исходног материала мощность, потребляемая дробилкой, уменьшается и при ее зна чении,меньшем заданного,частота качаний подвижного элемента дробилки увеличивается, а крупность продробленного материала соответственно уменьшается. Наиболее близким к предлагаемому по технической сушности известен спо соб регулирования работы дробилки, включающий измерение мошности на дро ление, из-менение загрузки материала дробилку обратно пропорционально мош ности на дробление и изменение частоты качания подвижного конуса. В этом способе частоту качаний конуса изменяют прямо пропорционально мощности на дробление и обратно прог порционально производительности дробилки (2, Однако известный способ регулирования нельзя использовать для управления процессом дробления в инерцион ной дробилке. Вследствие отсутствия, фиксированного значения разгрузочной щели гранулометрический состав продуктов дробления изменяется с изменением свойств и количества подаваемого в дробильное пространство материала Отсутствие в инерционной дробилке кинематических связей между подвижны и неподвижным конусами и высокая частота качаний подвижного конуса приводят к соударению броней при освобождении дробильного материала, в результате чего происходит преясдевременное разрушение броней. Цель изобретения - повышение точности регулирования . Указанная цель достигается тем, что согласно способу регулирования /режима работы дробилки, включающему -измерение мощности на дробление. Изменение загрузки материала в дробилку обратно пропорционально мощности на дробление и измене ние частоты качаний подвижного конуса, изм|2ряют отклонение подвижного конуса относительно вертикальной оси и уровень материала в дробилке и корректируют загрузку материала, причем изменение частоты качаний подвижного конуса осуществляют обратно пропорционально среднему отклонению подвижного конуса отнЬсительно вертикальной оси , а коррекцию загрузки материала в дробилку осуществляют прямо пропорционально среднему отклонению подвижного конуса дробилки относительно вертикальной оси от заданного знача- ния и обратно пропорционально уровню материала в дробилке. Кроме того, измеряют максимально возможный. угол отклонения подвижного конуса от вертикальной оси и изменяют пропорционально заданное Значение отклонения подвижного конуса относительно вертикальной оси. Сущность способа заключается в том,что расстояние .между подвижной и .неподвижной бронями.при наибольшем сближении зависит от дробящего уси-. ЛИЯ,создаваемого центробежной.Силой, й сопротивления слоя материала, нахо дящегося в ,дз обильном пространстве. Величину центробежной силы можно регулировать изменением частоты вращения вала конуса. В условиях меняющихся свойств и количества дробильного материала в дробилке, регулируя дробящее усилие изменением частоты вращения вала конуса, можно поддерживать постоянным размер разгрузочной щели, что позволяет осуществить стабилизацию гранулометрического состава продуктов дробления. Это позволяет исключить соударение броней. Размер разгрузочг. ной щели можно определить по величине угла отклонения подвижного конуса от вертикальной оси. Поэтому управление процессом дробления инерционной дробилки сводится к стабилизации, угла, отклонения подвижного конуса отно- г сительно вертикальной оси. При дроблении очень прочных пород может возникнуть режим работы дробилки, когда угол отклонения подвижного конуса относительно вертикальной оси будет меньше заданного, а частота качаний - максимальной. В этом случае;, с целью уменьшения сопротивления материала раздавливанию, уменьшают количество материала в дробящем пространстве пока угол отклонения конуса от вертикальной оси не достигнет заданного значения.
Все это позволяет повысить точность регулирования гранулометрического состава продуктов дробления и надежность работы дробилки.
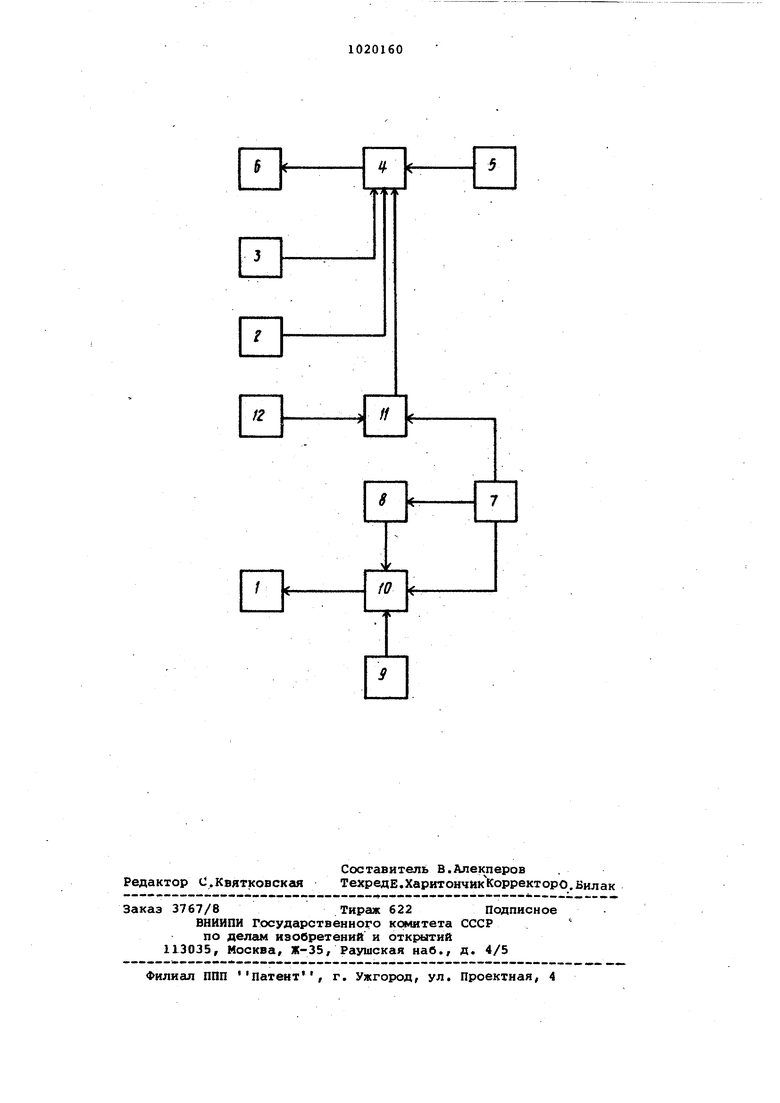
На чертеже показана блок-схема/ реализующая способ регулирования режима работы дробилки. Измеряют уровень ма териала в инерционной дробилке f и мощнсхль, пЪтребляему на дробление датчиком 2 уровня и датчиком 3 мощности, сигналы КОТО1ШХ сравнивают на входе регулятора 4 производительности загрузки дробилки с сигналом задатчика 5 производительности загрузки дробилки и изменяют производительность питателя 6, воздействуя на его привод, обратно пропорционально отклонению уровня материала и лющности, потребляойой на дробление, от заданных значений.
Измеряют отклонение вала или псэдвижного конуса (не показан) от вертикальной оси датчиком 7, .сравнивают его сигнал с сигналами устройства 8 максимально возмозкногр отклонения ваяа или конуса от вертикальной оси (при условии соприкасания броней подвижного и неподвижного конусов) и задатчи ка 9 отклонения конуса на входе регу .регулятора 10, и «зменяют при помовди последнего частоту качания конуса, воздействуя на привод дробилки 1, обратно пропорционально отклонению действительного значения отклонения вала или конуса относительно вертикальной оси от заданного.
Если при максимальном .числе качаний конуса отклонение вала н. конусу относительно вертикальной оси будет меньше заданного, то с логического устройства 11, на которое подаются сигналы с датчика 12 частоты вращения вала подвижного конуса и датчика 7 отклонения вала .;или конуса от вертикальной оси, подают сигнал на регулятор. 4 и, изменяют производительность питателя 6, воздейс.твуя на его привод, прямо пропорционально отклонению- действительного отклонения вала или конуса от вертикальной оси от заданного.
С целью повышения точности регулирования в условиях износа броней измеряют максимально возможное отклонение вила или конуса от вертикальной оси, для чего дробилку 1 запускают с малой частотой качания при отключенном питателе 6. Постепенно увеличивают частоту качаний конуса до соприкосновения броней подвижного и неподвижного конусов, при эюм вал и конус будут иметь максимально возможное отклонение от вертикальной оои. Сигнал с датчика 7, пропорциональный .;максимальнс 1у отклонению вала и |конуса, запоминается на устройстве 8. Изменяют тропорционально| за данное значение отклонения вала и конуса, для чего на вход регулятора 10 подается сигнал с устройства 8. На входе регулятора из сигнала устройства 8 вычитаются сигналы датчика 7 и задатчика 9. С износсам броней сигнал устройства 8 возрастает,.что приводит к пропо| циональному увеличению .заданного значения отклонения и, следовательно, к стабилизации размера разгрузочной щели при наибольшем сближении конусов и грансостава продуктов дробления.
Использование предлагаемого способа регулирования режима работы инерционной дробилки позволяет получить стабильный гранулометрический состав продробленного материала путем обеспечения стабилизации размера разгрузочной щели дробилки, а .также повысить надежность работы дробилки за счет предотвращения возможности соударения броней дробилки Все это позволяет снизить затраты на подготовку материала для обогащения за счет снижения затрат на измельчение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования работы дробилки | 1980 |
|
SU902830A1 |
| СПОСОБ ОПУСТОШЕНИЯ ИНЕРЦИОННОЙ КОНУСНОЙ ДРОБИЛКИ | 2012 |
|
RU2584164C2 |
| СПОСОБ УПРАВЛЕНИЯ ДРОБИЛКОЙ И ДРОБИЛКА | 2007 |
|
RU2508948C2 |
| ОБНАРУЖЕНИЕ ПОСТОРОННЕГО МАТЕРИАЛА | 2012 |
|
RU2592555C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ КОНУСНОЙ ДРОБИЛКИ | 2010 |
|
RU2513532C2 |
| ГИРАЦИОННАЯ ДРОБИЛКА, ВКЛЮЧАЮЩАЯ ПРИВОД С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ И СИСТЕМУ УПРАВЛЕНИЯ | 2019 |
|
RU2782545C2 |
| Способ управления многостадийным процессом дробления | 1985 |
|
SU1303189A1 |
| Способ регулирования режима работы дробилки | 1981 |
|
SU946672A1 |
| Конусная дробилка с усовершенствованной гидравлической системой | 2023 |
|
RU2802938C1 |
| Способ управления процессом дробления кускового сырья в конусных дробилках | 1989 |
|
SU1701378A1 |
1. СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ДРОБИЛКИ, включающий измерение мощности на дробление, изменение загрузки материала в дробилку обратно пропорционально мощности на дробление и изменение час.тотБ1.качаний подвижного конуса, отличающийся тем, что, с целью повышения точности регулирования, измеряют отклсжение подвижного конуса относительно вертикальной оси JH уровень в дробилке и корректируют загрузку мате{я1ала, причем изменение частота1 качаний подвижного конуса осуществляют обратно пропорционально среднему отклонению подвижного конуса относительно вертикальной оси, а кс рекцию загрузки материала в дробилку осуществляют прямо пропорционально среднему отклонению подвижного конуса дробилки относитепьно вертикальной оси от заданного значения и обратно пропорционально уровню материала в дробилке. 2. Способ по П.1 готлича-ю-, щи и с я тем, что измеряют макси- § мально возможный угол отклонения подвижного конуса от вертикгшьной оси СЛ и изменя 6т пропорционально задан:- тят Ное значение отклонения подвижного HI конуса относительно вертикальной оси. -§ О чэ D Ф О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ | 0 |
|
SU408661A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 2934246/33 кл, В 02 С 25/00, 1980 ,(пррт6тип 1 . | |||
