Изобретение относится к способам управления технологическими процессами дро- бильно-сортировочными комплексами и может быть использовано в автоматизированных системах управления при дроблении руд черных и цветных металлов, нерудных строительных материалов, сырья для химической промышленности.
Цель изобретения - повышение качества управления.
Сущность способа заключается в следующем.
Размер разгрузочных щелей дробилок регулирует скорость качания подвижного элемента, которую устанавливают в зависимости от выбранного варианта, для чего оценивают себестоимость i-й стадии дробления, сравнивают полученную себестоимость с заданными возможными вариантами себестоимости при п возможных вариантах рудоподготовки i-й стадии, выбирают П; вариант рудоподготовки, который после i + 1 стадии на выходе дробления обеспечивает стабильный грансостав при заданной производительности с наименьшими затратами на дробление.
При этом себестоимость дробления определяют как отношение расхода электроэнергии к количеству продробленного материала с учетом приведенных затрат на дробление
С |К,
где Э - энергозатраты на дробление;
Q - количество продробленного материала;К - приведенные затраты.
Измеряют скорость вращения и потребляемую двигателем дробилки мощность и, используя метод решения вариационных задач, задавшись степенью дробления и производительности последней i-й стадии, оценивают текущую себестоимость и выбирают режим работы предыдущих стадий дробления.
На чертеже представлена схема осуществления способа управления многостадийным процессом дробления.
Схема содержит датчики грансостава 1, производительности 2, мощности 3 и числа качаний 4, АЦП 5 для первой стадии дробления, датчики грансостава 6, производительности 7, мощности 8 и числа качания 9, АЦП 10 для второй стадии дробления, датчики грансостава 11, производительности 12, мощности 13 и числа качаний 14, АЦП 15 для третьей стадии дробления, устройство ввода и вывода 16, интерфейсный блок 17, вычислительное микропроцессорное устройство 18 с оперативным заполняющим устройством 19 и постоянным запоминающим устройством 20 и ЦАП 21, регулятор оборотов привода дробилки 22, привод дробил
5
0
.5
0
ки 23 для первой стадии дробления, ЦАП 24, регулятор привода 25, привод дробилки 26 для второй стадии дробления; ЦАП 27, регулятор оборотов 28, привод дробилки 29 для третьей стадии дробления.
Способ осуществляют следующим образом.
Сигналы технологических датчиков по каждой из трех стадий: грансостава 1,6,11, производительности 2,7,12, мощности 3,8,13, числа качаний подвижных элементов дробилок 4,9,14, поступают на входы АЦП 5,10,15, откуда в устройство ввода, вывода 16 через интерфейсный блок 17 они поступают в вы числительное микропроцессорное устройство 18, где по программе, хранимой в постоянном запоминающего устройстве 20, производится реализация алгоритма управления. Согласно известным зависимостям по полученным значениям мощности и производительности вычисляются энергетические затраты по каждой из трех стадий по формуле:
М --IV, i 1,2,3 til
где Ai - стоимость 1 квт.ч. электроэнергии для реальной энергосистемы.
Вычисленные значения хранятся в ячейках памяти. По значениям грансостава и числа качаний подвижных конусов дробилок п, для i 1,2,3 поступают данные о приведенных затратах на каждую стадию дробления, которые записаны в программе в виде таблицы для каждой из трех стадий.
Эти данные для каждой из стадий суммируют с полученными ранее и хранимыми энергетическими затратами и в результате получают стоимость дробильного передела каждой стадии
С, + АК, i 1,2,3 y.v
(1)
АК, - энергетические затраты.
В таблицах по каждой из трех стадий внесены все возможные варианты числа качаний для заданных значений грансостава, вычисляются все возможные стоимости соответствующих вариантов рудоподготовки каждой стадии С|опт., Czotn-, Суот, при которых обеспечивается заданный грансостав. По выбранным Cionr., Саопт, Сзопт в таблицах по каждой из стадий выбирается значение числа качаний п,, при котором обеспечивается заданный грансостав с минимальными затратами на рудоподготовку С|опт., С2опт., Сзопт.. Данным значениям п, присваивается значение П,опт., П20ПТ., П.., вычисляются ДЛЯ
каждой из стадий изменение числа качаний, которое надо подать на регулятор привода в виде:
АП; П,опт - П;,i 1,2,3
Использование способа позволяет повысить качество управления режимными параметрами дробилок на каждой стадии дробления, что значительно улучшит их технологические характеристики, уменьшает энергетические затраты и износ футеровочного материала и за счет регулирования ширины разгрузочной щели дробилки изменением числа качаний подвижного конуса в соответствии с гранулометрическим составом и твердостью исходного сырья. Кроме того, этот способ позволяет в широких пределах варьировать количеством продробленного материала и его качеством (грансоставом), а также позволяет повысить КПД дробилок.
Формула изобретения
Способ управления многостадийным процессом дробления, включаюш.ий измерение потребляемой мошности и производительности дробилок, вычисление энергетических
затрат на дробление и осушествление регу- лируюшего воздействия на каждую из дробилок, отличающийся тем, что, с целью повышения качества управления, измеряют число качаний подвижных элементов и гран- состав на выходе каждой стадии дробления, вычисляют на их основе приведенные затраты на каждую стадию дробления и вычисляют оптимальное число качаний подвижного органа в зависимости от приведенных затрат на дробление и энергетических затрат, причем регулирующее воздействие Uper. на кажду из дробилок осуществляют по формуле
Uper Попт. Пизм.,
где Поит.-оптимальное число качаний подвижного органа каждой дробилки; . - измеренное число качаний подвижного органа этой дробилки.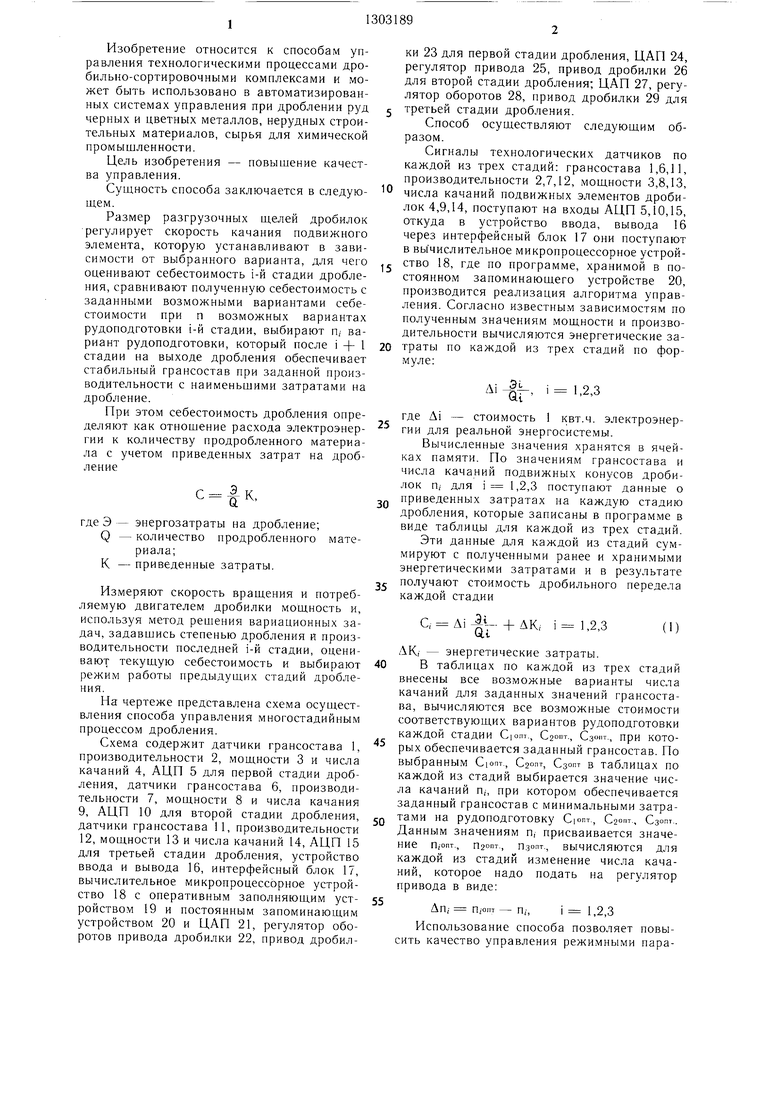
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации грансостава материала для группы параллельно работающих дробилок | 1986 |
|
SU1416180A1 |
| Способ автоматического управления технологическим процессом рудоподготовки | 1986 |
|
SU1373436A1 |
| Способ регулирования режима работы дробилки | 1982 |
|
SU1020160A1 |
| Устройство для управления многостадийным процессом дробления | 1982 |
|
SU1036374A1 |
| Система регулирования режима работы дробилки | 1983 |
|
SU1101303A1 |
| Способ регулирования работы дробилки | 1980 |
|
SU902830A1 |
| Способ автоматического управления группой параллельно работающих дробильных комплектов | 1978 |
|
SU737012A1 |
| Способ управления многостадийным процессом дробления | 1980 |
|
SU912281A1 |
| Система регулирования трехстадийного комплекса дробления | 1986 |
|
SU1450861A1 |
| Способ регулирования режима работы дробилки | 1981 |
|
SU946672A1 |
Изобретение относится к способам управления технологическими процессами дро- бильно-сортирх)вочными комплексами. Может быть использовано в автоматизированных системах управления при дроблении руд черных и цветных металлов, нерудных строительных материалов, сырья для химической промышленности. Позволяет повысить качество управления. Для достижения этой цели измеряют потребляемую мощность и производительность дробилок, вычисляют электрические затраты на дробление и осуществляют регулирующее воздействие на каждую из дробилок, измеряют число качаний подвижных элементов и грансоставов на выходе каждой стадии дробления, вычисляют на их основе приведенные затраты на каждую стадию дробления и вычисляют оптимальное число качаний подвижного органа в зависимости от приведенных затрат на дробление и энергетических затрат, причем регулирующее воздействие на каждую из дробилок осуществляют по формуле Uper Поит. Пнзм., где попт-оптимальное число качаний подвижного органа каждой дробилки; Пизм - измерение число качаний подвижного органа этой дробилки. 1 ил. i (Л со о со 00 со
| Способ регулирования работы дробилки | 1980 |
|
SU902830A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления многостадийным процессом дробления | 1980 |
|
SU912281A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
