Изобретение относится к iipnooDocTpoeнию и машиностроению и может найти ирименение фи решении задач, связан}1ых с ориентацией и сортировкой плоских асимметричных деталей, например, при автоматизации загрузки технологического оборудования. Известно устройство для управления ориентацией и сортировкой нема1нитных токонроводяшн.х деталей, содержащее блок распознавания, блок сравнения, преобразователь код-аналог, блок памяти, блок коммутации, пульт управления, генератор импульсов, двоичный счетчик и блок питания электромагнитов I j . Недостатками известного устройства являются ограничение ориентации и сортир(}вки лишь классом немагнитных токоироводящих дета;1ей и невозможность ориентирования раз;|ичных по форме, но близких по нлошади поверхности деталей ибо аналоговые сигналы с блока распознавания таких деталей, а следовательно, и двоичный код в блоке памяти также будут близки. Это значительно снижает технологические возможности устройства. Цель изобретения - расширение технологических возможностей устройства. Поставленная цель достигается тем, что устройство для управления ориентацией и сортировкой деталей, содержащее выполненный в виде матрицы, состоящей из снегочувствительных слоев, блок расггознавання, выход которого соединен с первым входом блока сравнения, второй вход которого через преобразователь код-аналог соединен с выходо.м блока памяти, а выход связан с генератором импульсов и с блоко.м гпггания э;1ек ромагшггов, входы которых связаны с пу;1ьтом управления, выход которого соединен с блоком коммутации, связанньгм с блоком памяти, расположенн1,1Й между генератором имцульсов и блоком памяти двоичный счетчик, снабжено тре.мя связанными с блоком распознавания последовате.ьными цепочками, состояниями из б.тока сравнения, ipeобразователя код-аналог и блока намяти. четырьмя ключами, блоком совпадения, блоком датчиков сброса и схемой ИЛИ, матрица блока распознавания выно;1нена из шести светочувствительных слоев, причем четыре слоя, расположенные в средней части .матрицы, электрически связаны с входами соответствующих четырех блоков сравнения, последний по ходу детали слой, являющийся пятым выходо.м блока распознавания, параллельно связан с вторыми входами четырех блоков сравнения, а (гервый гю детали слой, являющийся шестым выходом блока распознавания, соединен с третьим входом блока питания электромагнитов, причем свободные входы трех введенных блоков памяти соединены между собой и с первым входом имеющегося блока памяти и с блоком ком.мутации, между двоичпым счетчиком и входами б.юков иамяти вк;почены к;;к5чи., управ.:1яющие входы которых Соединены с соответств -ющими блоками сравие1П1я, приче.м между входами блоков сравнения и 1енератором имг; льсов включен блок совпадения, выход которого соединен с входом блока п.итания электромагнитов и входом блока коммутации, датчик сброса соедине ; с входом схемы ИЛИ, выход которой соединен с входом блока коммутации и с входом б.юка питания э,1ектромагиитов. Механическая часть б;1ока электромагнитов содержит вертикальный лоток, дно которого вьпюлнено в виде шибера, связанного с одним из электромагнитов, состыкованный со стороны входа с бункерны.м питателем, а со стороны вьгхода с б.током распознавания который в свою очередь состыкован с .механизмом сортировки с отвод1 ым ,тотком блока дно KOTopoio выполнено в виде нишера, свя.чанного с другам электромагнитом, а отно.чной лотсж брака снабжен датчиком блока датчике)-; сброса, механизм ориентирования по cTopoiie, состоящей из {Jpиeнтиpyющeгo ;1отка. стенки кото)ого на начальном участке вьнюлнены вертикальными с плавным переход(и1 г наклонные, и ориентирующей зас:1()пки, боковые поверхиостп которой вычюлнсны в виде ориептирую1цих винтовых поверхностей, образую цих со стенками .тотка каналы противоположного) вращения, связанно) осью с третьим э, ектрома1 нитом, механизм ориентирования но концу, содержапий ориентирующий ;IOTOK и распо;1оженный перпендикулярно к liCMy транспортный лоток с однпм входны.м и ;1вумя выходны.ми кана;1а.И. выполненный с наклоном в сторону ) из каналов и в.ыходны.ми частями кана.юв, нап)ав.лениыми в разные стороны вдол) транспортно1о .тотка с зазором .между выходными частями каьа.юн и транспортны.м /IOTKOM, нревьппающи.м максимальную толnuiHy орпептируемьгх .аета.лей, ориентирующую заслонку, связанную ири иомощи тяги с четвертым электромашитом, и другой датчик блока да чиков сброса, расположенный li в1) части т)анспор-тного лотка. Распшренис технологических возможнос|-ей 1редла1ае.мог-о устройства; по сравнению с нрототином за счет рас1()31-:авания деталей, различных по форме, ио бл11зких по площади осуществлено за счет того, что .матрица блока pacпJзиaвaния состоит пе из одного слоя распознавания, как в прототипе, а из четырех и введены дополнительно три б.чока сравнения, три преобразователя код-аналог, три блока на.мяти, ключа, блок совнадеиия, блок датчиков сброса и схема ИЛИ с соответствующи.ми связя.ми межд ними. В случае, если две различные детали имеют одинаковую площадь, либо необходимую одинак(.Вую площадь, либо необходимо раз;ц1чить четыре раз.шчных положения прохождения одной детали (как в предлагаемом устройстве), то матрица, состоящая из одного с;г,)я распознавания, выдаст на выходе блока распознавания одинаковые аналоговые сигналы и распознать, какая проходит деталь, либо в каком из четырех устойчивых положений деталь находится, будет невозможно. Для распознавания положения детали, асимметричной по стороне и симметричной по концу, матрица блока распознавания может состоять из двух слоев распознавания, расположенных горизонтально (т. е. разделенных горизонтальным изоляционным слоем), для распознавания положения детали, асимметричной по концу и симметричной по стороне, матрица блока распознавания может состоять из двух слоев расположенных вертикально (т. е. разделенных вертикальным изоляционным слоем), при деталях, асимметричных по стороне и по концу, матрица должна состоять из четырех слоев. Расширение технологических возможностей предлагаемого устройства по сравнению с прототипом благодаря распознаванию деталей независимо от магнитных свойств и электропроводности материала, из которого они изготовлены, осуществляется за счет того, что блок электромагнитов состоит из четырех электромагнитов, связанных с соответствующими заслонками, и все эти электромагниты принимают участие в ориентировании и отбраковке (сортировке) каждого типа деталей. В предлагаемом устройстве ориентирование деталей осуществляется связанным с электромагнитами ориентирующими заслонками, т. е. чисто механическим путем и, еледовательно, магнитные свойства и электропроводность материала, из которого изготовлены детали, при данном способе ориентирования несущественны. На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - блок распознавания; на фиг. 3 - механическая часть блока электромагнитов; на фиг. 4-7- схемы наложения контуров детали на блоке распознавания в каждом из четырех устойчивых положений. Предлагаемое устройство содержит (фиг. 1) блок 1 распознавания, каждый из четырех выходов которого соединен с первым входом соответствующего блока 2 сравнения а пятый выход соединен с вторыми входами всех четырех блоков 2 сравнения, блок 3 коммутации, выход которого соединен с первыми входами четырех блоков 4 памяти, четыре преобразователя код-аналог 5, вход каждого из которых соединен с выходом соответствующего блока 4 памяти, а выход каждого - с третьим входом соответствую.щего блока 2 сравнения, пульт 6 управления, первый выход которого соединен с первым входом блока 7 питания электромагнитов и параллельно с первым входом блока 3 коммутации, второй вход блока 7 питания электромагнитов соединен с щестым выходом блока распознавания, а выход блока 7 питания электромагнитов соединен с входом блока 8 электромагнитов, третий вход блока 7 питания электромагнитов соединен с выходом блока распознавания, а выход блока 7 питания электромагнитов соединен с входом блока 8 электромагнитов, третий вход блока 7 питания электромагнитов соединен с выходом блока 3 коммутации, генератор 9 импульсов, первый вход которого соединен с вторым выходом пульта 6 управления и параллельно с вторым входом блока 3 коммутации, двоичный счетчик 10, вход которого соединен с выходом генератора 9 импульсов, а выход - с первыми входами четырех ключей 11, выходы которых соединены с вторыми входами соответствующих блоков 4 памяти, вторые входы каждого из четырех ключей 11 соединены с выходом соответствующего блока 2 сравнения и параллельно заведены на четыре входа блока 12 совпадения, первый выход которого соединен с вторым входом блока 7 питания э.пектромагнитов и с третьим входом блока 3 коммутации, блок 13 датчиков сброса, оба выхода которого поданы на входы схемы ИЛИ 14, выход которой соединен с пятым входом блока 7 питания электромагнитов и с четвертым входом блока 3 коммутации. Блок распознавания (фиг. 2) представляет собой матрицу, длина и щирина которой выбирается не менее соответствующих максимальных размеров деталей, подлежащих ориентированию. Для ориентирования отбирается группа деталей, близких по габаритным размерам. Матрица состоит из шести светочувствительных слоев, например фоторезистивных, электрически изолированных друг от друга. Слои 15-18 являются слоями распознавания и формируют первый, второй, третий и четвертый выходы аналогового сигнала (фиг. 1). Слой 19, первый по ходу детали (направление хода детали показано стрелкой), является датчиком входа детали в матрицу. Слой 20 является слоем считывания и формирует сигнал ввода аналоговой информации с блока 1 распознавания в блоки 2 сравнения (фиг. 1). Механическая часть блока электромагнитов (фиг. 3) содержит бункерный питатель 21 с вертикальным выходным лотком 22, дно 23 которого выполнено в виде шибера, связанного с электромагнитом 24 блока 8 электромагнитов, блок 1 распознавания, вход которого состыкован с выходом лотка 2Й, а выход - с лотком 25 механизма сортировки, дно 26 которого выполнено в виде шибера, связанного с электромагнитом 27 блока 8 электромагнитов, а отводной лоток 28 брака снабжен датчиком 29 блока 13 датчиков сброса, механизм ориентирования по стороне, состоящий из ориентирующего лотка 30, стенки 31 и 32 которого на начальном участке выполнены вертикальными с плавным переходом в наклонные и орирентирующей заслонки 33, боковые поверхности которой выполнены в виде ориентирующих винтовых поверхностей, образующих .со стенками 31 и 32 .лотка 30 кана;1ы нротивоноложного вран1,ения, связанной с электромагнитом 34 через ось 35, механизм ориентирования по концу, содержащий ориентирующий лоток 36 с одним входным и двумя выходными каналами 37 и 38, вьиюлненный с наклоном в сторону какала 38 и выходными частями каналов 37 и 38, направленными в разные стороны вдоль транспортного лотка 39 (нанравлепие хода детали по лотку показано стрелкой), расноложенного перпендикулярно входной части ориентирующего лотка 36 с зазором между выходными частями каналов 38 и 37 и транспортным лотком 39, превышающим максимальную толщину ориентируемых делалей, ориентирующую заслонку 40, связанную при noMOHUi тя|-и 41 с электромагнитом 42, датчик 43 блока 13 датчиков сброса, расположенный в выходной части транснортпого лотка 39. Кроме того, на фиг. 3 показан источник 44 cBeTOBoiO потока.
Рассматриваемый класс деталей. кото)ые подлежат ориентированию в нред,1агаемо.м устройстве, имеет четыре устойчивых положения (имеются ввиду детали, вьггянутые в дл и и у).
На фи 4 --7 иозицией 45 обозначена деталь в четырех ее возможных устойчивьгх положениях при прохождении ее через 6;ioK распознавания.
Ориентирование таких деталей и выдача их в нужпом положении воз.можна liyievi их разворота по стороне, т. е. оси, пара,1ле;1ьной направлению движения, либо по концу, т. е. вокруг оси, 1ерпендилуля11нс)й этому направлению, либо обоими |)азворотами совместно.
Устройство работает следуюии1м образом. Работа данного устройства в течение какого-то определенного промежутка времени (в зависи.мости от партии деталей) происходит лищв с одним тином дета.аи, напри.мер, в процессе загрузк иресса ири вторичной штамповке. Дета,ли посллпают на операцию вторичной штамповки в неориентированном состоянии (навалом) в основном из-за нромежуточной операции галтовки между первичной (вырубка) и вторичной (гибка, чеканка, пробивка и т. л.) штамповочными операциями. Детали из навала необходи.мо сориентировать и выдать либо непосредственно под пресс, либо иод схват манипулятора, загружающего пресс.
На этапе обучения на данную конкретную деталь, ориентация которой буклет производиться устройством, одна из деталей устанавливается последовате,1ьно в блок 1 распознавания в каждом из четырех устойчивых положений так, чтобы она перекрывала с.юй 20 считывания матрицы (фиг. 2), но не выходила за его пределы по ходу своего движения. Порядок носледовательности, в которой устанавливается детали в процессе
обучения, соответствует порядку, изображенному на (|)иг. 4 7. Выби)ается данный ио)ядоь нз сле.аующих соображений. Первьгм устанавливается но.чожение детали, которое соответствует положению ее необходи:мой выдачи, нредположим полс жение, изображенное на фиг. 4, Дй:1ее деталь устаиавливйется в положение, требующее для ее не|)евода в нужное }1ам ориентации по стороне, т. е. разворот;; вокруг оси, параллельной направлению движения детали (фиг. 5). Затем деталь устанавливается в П(х1оже1п-1е, требующее для ее перевода в нужное нам ориентации по концу, т. е. разворота вокруг осп, перпендикулярной направлению движения детали, в нащем случ ае нериендикулярной плоскости чертежа (фи1 6), на которо.м изображено данное положение. И, наконец, деталь устанавливается в но.южение (фиг. 7), требующее д.1я ее неревода в нужное нам ориентации и ПО стороне, и по концу.
К каждом из указанных положений слой 20 счит1явапия (фиг. 2) фо)мирует еигнал, разре наюн,ий введение аналоговой информации с светочувствительных слоев 15-18 соответствуюп1ей площади перекрытия этих с,1оев Д(та;1ью в данном положе11Ии, в четыре соответствующих блока 2 сравнения (фиг. 1)
Таким образом, аналоговая информация соответс вуюнгая п.ющади Г1е)екрытия деталью ciseTtJBoio потока от источника 44 па каждый из светочувствительных с,1оев 1518, 1 во;1ится в соответствующие им блоки 2 С)авнс1111я. Итак, сначала дета,ль устанав,ливаелчя в положение, изображенное на (}). 4. С iiy;ii Ta f) управления (фиг. 1) усланаи.диваелхя положение блока 3 коммучацил, соответствующее данному полоЖ(ч(ию дел-али, и одновремсьщо осуществляелся включение i-енератора 9 импульсов. Осуществляется счет импу.льсов двоичным счетчико.м 10, и двоичный код через четыре блока 4 памяти юдается на четыре преобразовал-еля код-аналог- 5. Соответствующий коду аналоговый сигна.л с выхода каждого преобразователя 5 подается на третьи входы соответствующих блоков 2 сравнения. В каждоу; блоке 2 сравнения происходит сравнение заданного положением детали аналога с блока 1 )аспознавания с постоянно возрастающим аналогом с преобразователей код-аналог 5. При совнадении указанных аналоговых сигналов с каждого блока 2 сравнеь:ия видается сигнал на соответствующий ключ 11, запрещающий поступление двоичпото кода с выхода двоичного счетчика 10 на вход соответетвующего блока 4 памяти, п одновременно с каждого блока 2 сравнегия выдается сигнал на соответствую щий вход блока 12 совпадения. Нри поступ:iein«( па блок 12 совпадения сигналов со всех четырех блоков 2 сравнения с выхода блока 12 ноступает на вход генератора 9 имиульсов сигнал, отключанэщий последний.
Таким образом, в четырех блоках 4 памяти оказывается записанным двоичный код, соответструющий первому положению детали. Подобным образом осуществляется запись кодов Б каждом из четырех возможных положений деталей в вышеуказанной последовательности, и этап обучения на этом заканчивается.
В рабочем режиме (режим распознавания) поток деталей, каждая из которых может быть в любом из четырех устойчивых положений, выходит из бункерного питателя 21 (фиг. 3), и через лоток 22 деталь поступает в блок 1 распознавания. При входе первой по ходу движения детали в блок 1 распознавания она частично перекрывает световой поток от источника 44 на светочувствительный слой 19 (фиг. 2), и в блоке 1 распознавания формируется сигнал, воздействующий на второй вход блока 7 питания электромагнитов (фиг. 1), запитывается и ставится на память электромагнит 24 (фиг. 3) блока 8 электромагнитов (фиг. 1). Электромагнит 24 открывает дно 23 лотка 22, и все последующие детали возвращаются в бункерный питатель 21. При перекрытии деталью светочувствительного слоя 20 (фиг. 2) в блоке 1 распознавания формирует ся сигнал, разрешающий введение аналоговой информации, пропорциональной площади перекрытия деталью светочувствительных слоев 15-18 (фиг. 2), в соответствующие блоки 2 сравнения. В рабочем режиме с пульта 6 управления (фиг. 1) установлен такой режим работы, при котором осуществляется последовательная выдача с определенным временны.м интервалом наборов двоичных кодов, соответствующих положению детали в той последовательности, в которой они были записаны с четырех блоков 4 памяти через соответствующие преобразователи код-аналог 5 на третьи входы блоков 2 сравнения. Одновременно с пульта 6 на первый вход блока 7 питания электромагнитов подается сигнал, разрешающий его работу.
Рассмотрим процесс ориентации более подробно. Предположим, что при подаче первого набора кода во всех блоках 2 сравнения произошло совпадение. Следовательно деталь идет в положении, не требующем ориентации (фиг. 4). Одновременно с данным кодом с выхода блока 3 коммутации (фиг. 1) на вход блока 7 питания электромагнитов приходит сигнал, запрещающий включение эл-ектромагнитов 27, 34 и 42 (фиг. 3). С выходов всех четырех блоков 2 сравнения (фиг. 1) на входы блока 12 совпадения поступают сигналы совпадения, и с выхода блока 12 совпадения поступает сигнал на четвертый вход блока 7 питания электромагнитов, осуществляющий установку на память сигналов, поданных на входы блока 7, и выдается сигнал на третий вход блока 3 коммутации, осуществляющий сброс дальнейщей коммутации и выдачи
наборов кодов блоком 3. Деталь проходит по лоткам 30, 36 и по каналу 38 и, так как электромагниты 27, 34 и 42 не включены, выходит на транспортный лоток 39 в том же , положении, в котором она проходила через блок 1 распознавания, т. е. в положении, изображенном на фиг. 4. При выходе детали на транспортный лоток 39 срабатывает датчик 43 (фиг. 3) блока 13 датчиков сброса и через схему ИЛИ 14 по пятому входу 0 осуществляется сброс памяти блока 7 питания электромагнитов и по четвертому входу сброс информации с блока 3 коммутации. Предположим, что совпадение кода во всех блоках 2 сравнения произошло при подаче второго набора кодов. Одновременно
5 с набором кодов по третьему входу блока 7 питания электромагнитов подготавливается цепь питания электромагнита 34 (фиг. 3), а по сигналу с блока 12 совпадения (фиг. 1) на четвертый вход блока 7 питания электроQ магнитов электромагнит 34 (фиг. 3) запитывается и устанавливается на память, а по сигналу с блока 12 совпадения (фиг. 1) на третий вход блока 3 коммутации осуществляется сброс дальнейшей коммутации и выдачи наборов кодов блоком 3 коммутации.
5 При срабатывании электромагнита 34 (фиг. 3) поворачивается заслонка 33, которая осуществляет ориентацию детали на стороне при ее прохождении по лотку 30. Сброс памяти с блоков 7 и 3 (фиг. 1) осуществляется, как и в предыдущем случае,
0 от датчика 43.
Предположим, что произошло совпадение кодов во всех блоках 2 сравнения при выдаче третьего набора кодов. Одновременно с набором кодов по третьему входу блока 7 питания электромагнитов подготавливается
5 цепь питания электромагнита 42 (фиг. 3), а по сигналу с блока 12 совпадения (фиг. I) на четвертый вход блока 7 питания электромагнитов электромагнит 42 (фиг. 3) запитывается и устанавливается на память, а
д по сигналу с блока 12 совпадения (фиг. 1) на третий вход блока 3 коммутации осуществляется сброс дальнейшей коммутации и выдачи наборов кодов блоком 3 коммутации. При срабатывании электромагнита 42 (фиг. 3) срабатывает заслонка 40 и пере
пускает деталь в выходной канал 37, тем самым осуществляя ориентацию детали по концу при ее прохождении по лотку 36. Сброс памяти с блоков 7 и 3 (фиг. 1) осуществляется, как и в предыдущем случае. Аналогичным образом при совпадении
кодов во всех блоках 2 сравнения (фиг. 1) при выдаче четвертого набора кодов включаются электромагниты 34 и 42 (фиг. 3) и осуществляется ориентация детали и по стороне, и по концу.
В том случае, если при выдаче всех четырех наборов кодов совпадения не произощло, то блок 3 коммутации (фиг. 1) коммутируется в пятое положение, в котором
коды не выдаются, а с выхода олока коммутации по третьему входу блока 7 питания электромагнитов запитывается и становится на память электромагнит 27, электромагнит 27 срабатывает и отводит дно 26 лотка 25 механизма сортировки, и деталь уходит по отводному лотку 29 брака, при прохождении через который деталь взаимодействует с датчиком 29 блока 13 датчиков сброса (фиг. 1), который через схему ИЛИ 14 осуществляет сброс информации с блоков 7 и 3. Одновременно при сбросе информации с блоков 7
н 3 ;|1обым из датчиков 29 либо 43 (фиг. 3) блока 13 (фаг. Г) происходит сброс питания с электро.магннта 24 (фиг. 3) блока 8 электромагнитов (фиг. 1), дно 23 (фиг. 3) выход,; ного лотка 22 становится на место, и следукмцая деталь поступит в блок 1 распознавания.
Создание предлагаемого устройства позволяет использова1ь промыныенные работы в условиях мелкосерийного и серийного изводства. что в свою очередь способствует повышению производительности труда.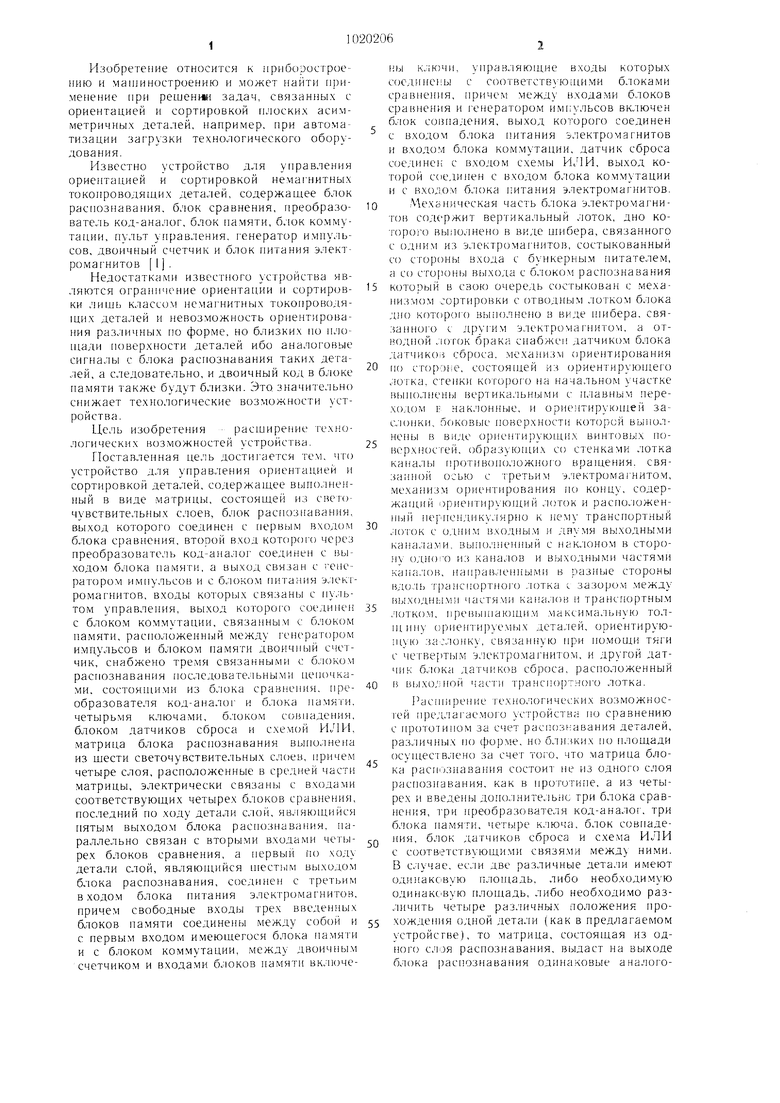




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ориентацией и сортировкой немагнитных токопроводящих деталей | 1980 |
|
SU942942A1 |
| Телевизионное ориентирующее устройство | 1985 |
|
SU1298956A1 |
| Устройство для ориентации деталей | 1982 |
|
SU1013196A1 |
| Устройство для автоматического ориентирования резьбовых деталей | 1986 |
|
SU1431914A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАННОЙ ПОДАЧИ СТРАТИФИКАТОРОВ | 1993 |
|
RU2053094C1 |
| Устройство для ориентации асимметричных токопроводящих деталей | 1983 |
|
SU1123838A1 |
| Устройство для ориентации деталей | 1986 |
|
SU1399064A2 |
| Устройство для автоматического ориентирования резьбовых деталей | 1987 |
|
SU1496986A1 |
| Устройство для контроля и транспортировки деталей | 1986 |
|
SU1416968A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ И НАКОПЛЕНИЯ ДЕТАЛЕЙ | 1991 |
|
RU2011504C1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ И СОРТИРОВКОЙ ДЕТАЛЕЙ, содержащее выполненный в виде матрицы, состоящей из светочувствительных слоев, блок распознавания, выход которого соединен с первым входом блока сравнения, второй вход которого через преобразователь код-аналог соединен с выходом блока памяти, а выход связан с генератором импульсов и с блоком питания электромагнитов, входы которых связаны с пультом управления, выход которого соединен с блоком коммутации, связанным с блоком памяти, расположенный между генератором импульсов и блоком памяти двоичный счетчик, отличающееся тем, что, с целью расщирени технологических возможностей, оно дополнительно снабжено тремя связанными с блоком распознавания последовательными цепочками, состоящими из блока сравнения, преобразователя код-аналог и блока памяти, четырьмя ключами, блоком совпадения, блоком датчиков сброса и схемой ИЛИ, матрица блока распознавания выполнена из щести светочувствительных слоев, причем четыре слоя, расположенные в средней части матрицы, электрически связаны с входами соответствующих четырех блоков сравнения, последний по ходу детали слой, являющийся пятым выходом блока распознавания, параллельно связан с вторыми входами четырех блоков сравнения, а первый по ходу детали слой, являющийся щестым выходом блока распознавания, соединен с третьим входом блока питания электромагнитов, причем свободные входы о трех введенных блоков памяти соединены (Л между собой и с первым входом имеющегося блока памяти и с блоком коммутации, между двоичным счетчиком и входа.ми блоков памяти включены ключи, управляющие входы которых соединены с соответствующими блоками сравнения, причем между входами блоков сравнения и генератором импульсов включен блок совпадения, выход которого соединен с входом блока питания электромагнитов и входом блока коммутации, датЮ чик сброса соединен с входом схемы ИЛИ, о го выход которой соединен с входом блока коммутации и с входом блока питания электо о ромагнитов.
/5 45
срагЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3223554/25-08, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
