Изобретение относится к подъемнотранспортным машинам и касается грузозахватных устройств, предназначенных для подъема грузов с различным расположением центра тяжести.
По основному авт. св. № 922025 известна траверса для подъема груза со c Ieщeнным центром тяжести, содержащая навешиваемую на крюк грузоподъемного механизма с помошью стропов прямоугольную раму, оснащенную грузозахватными органами и приспособлениями для изменения длин стропов,содержащим и закрепленные в углах рамы на ее продольных балках кронштейны с отверстиями, в которых размешены съемные пальшы, соединенные с одним KoifflOM каждого из стропов, а кажд1 1й строп вьтолнен из замкнутого каната, сложенного пополам, дополнительные кронштейньт с отверстиями, установленными параллельно основным, ка-реткой с приводом ее перемещения по направляющим, которыми снабжены кронштейны, причем стенки балок рамы наклонены под углом к вертикали, & кронштейны расположены в их плоскости, каждая каретка представляет собой обечайку, по торцам которой параллельно кронштейнам установлены полозья, и снабжена водилом с желобом для пальца, а привод каждой пары кареток включает в себя установленную на балке лебедку с блочной системой и тросом, прикрепленным к каретке Cl D
Недостатком известного устройства является то, что вследствие конструктивного наклона пластин с отверстиями и кареткой, а вместе с ними и желоба, после выемки палец самопроизвольно соскаль зывает с желоба, в связи с чем требуется его удержание вручную или путем применения оттяжного каната.
Цель изобретения - повышение удобства траверсы в эксплуатации.
Поставленная цель достигается тем, что траверса для подъема груза со смещенным центром тяжести.содержащая навешиваемую на крюк грузоподъемного механизма с помощью стропов прямоугольную раму, оснащенную грузозахватными органами и приспособлениями для изменения длин стропов, содержащими закреп ленные в углах рамы на ее продольных балках кронштейны с отверстиями, в которых размещены съемные пальцы, соединенные с одним концом каждого из стрсттов, а каждый строп выполнен из замкнутого каната, сложенного пополам, дополнительные кронштейны с отверстиями, установленными параллельно основным, кареткой с приводом ее перемещения по направляющим, которыми снабжены кронштейны, причем стенки балок рамы наклонены под углом к вертикали, а
кронштейны расположены в их плоскости, каждая каретка представляет собой обечайку, по торцам которой параллельно кронштейнам установлены полозья, и снабжена водилом с желобом для пальца, а
привод каждой пары кареток включает в себя установленную на балке лебедку с блочной системой и тросом,. прикрепленным к кареткам, снабжена механизмами фиксации пальца в крайнем выдвинутом
положении.
Кроме того, механизм фиксации пальца мозкет бьпъ вьшопнен в виде двуплечего рычага, шарнирно смонтированного на желобе перпендикулярно продольной оси
последнего, причем центр масс этого рычага смещен от шарнира его крепления в сторону пальца.
На JT, 1 изображена траверса, общий вид; на фиг. 2 - то же, вид сбоку;
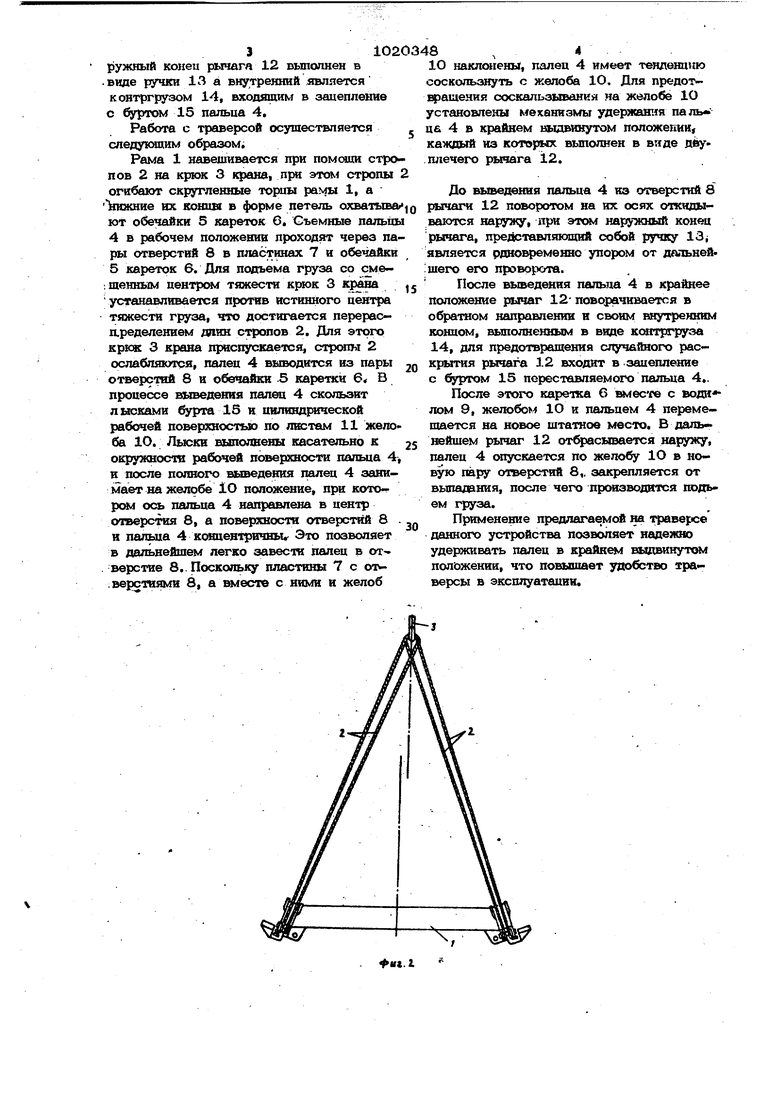
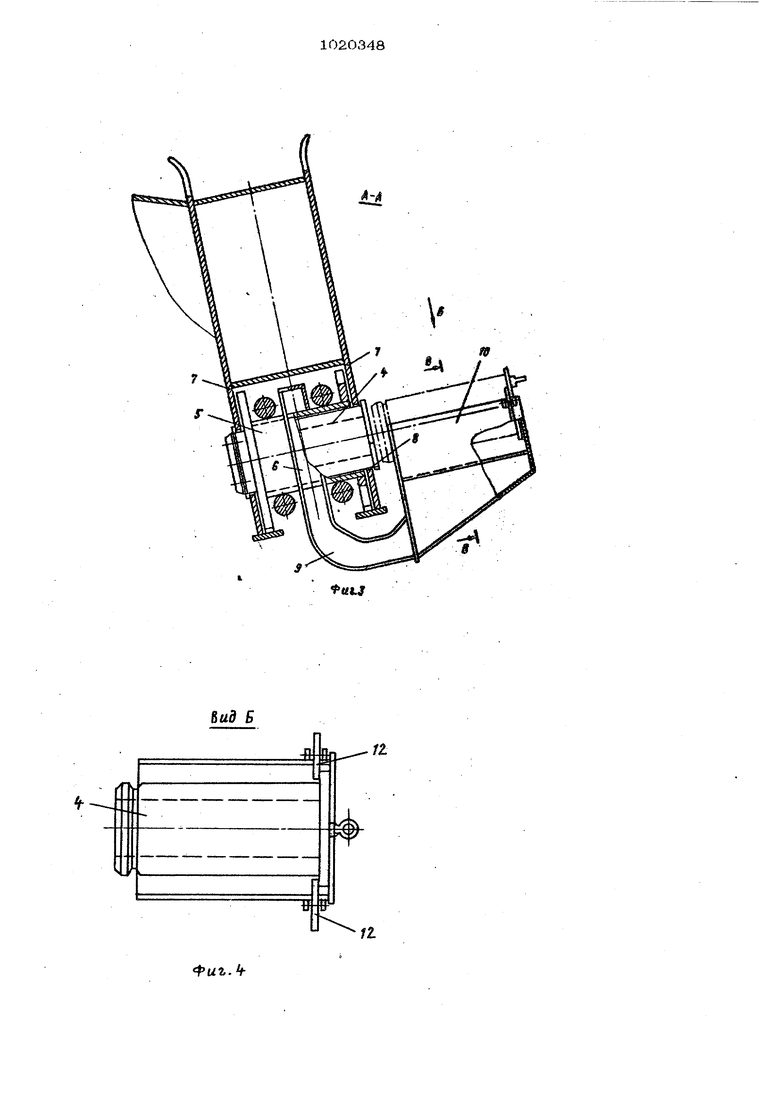
на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 разрез В-В на фиг. 3.
Траверса представляет собой сварную четырехугольную раму 1, навещиваёмую
при помсщи стропов 2 на грузовой крюк 3 крана. Нижние концы стропов 2 проведены на углы рамы 1 где огибают ее скругленные торны и петлями охватывают съемные пальцы 4 через обечайки 5 кареток 6.
На нижней плоскости продольных балок рамы 1, наклоненных к продольной плоскости, установлены кронштейны в виде двух параллельных пластин 7, являющихся продолжением внутренних и наружных
стенок балок. В пластинах 7 соосно выполнены отверстия 8,- Каждая каретка 6 снабжена водилом 9, выведенным за габарит пластины 7 и несущимжелоб 10 для поддержания пальиа 4 после его выведе.ния из отверстий 8 и обечайки 5 каретки 6 и при перестановке.
Желоб 10 вьтолнен в виде двух листов 11, установленных под углом друг к другу. При этом желоб 1О установлен
на каретке 6 таким образом, что внутренние его поверхности занимают в пространстве положение заподлицо с отверстием 8 при частичном его выдвижении из отверстия 8.
На листах 11 желоба 10 установлены механизь ы удержетшя пальца 4 в крайнем вьщв 1нутом положении, каждый из которых состоит из двуплечего рычага 12, ша p)uipiio смонтированного на желобе. Наружный коней рычага 12 вьшопкен в .виде ручки 13 а внутренний является контргрузом 14, входящим в зацепление с буртом 15 пальца 4. Работа с траверсой осуществляется следующим образом; Рама 1 навешивается при помощи стропов 2 на крюк 3 |фана, при этом стропы огибают скругленные ториы ракш 1, а Ъижние их кошш в форме петель охватьша ют обечайки 5 кареток 6. Съемные 4 в рабочем положении проходят через па ры отверстий 8 в пластинах 7 и обечайки 5 кареток в. Для подъема груза со рме.щенным центром тяжести крюк 3 крана устанавливается против истинного центра тяжести груза, что достигается перерасаределением ддин стропов 2. Для этого кркж 3 крана приспускается, стрсшы 2 ослабляются, палец 4 выводится из пары отверстой 8 и обечайки .5 каретки 6. В процессе выведения палец 4 скользит лысками бурта 15 и цилиндрической рабочей поверхностью по листам 11 жело ба 1О. Льюки вьшолнены касательно к окружноста рабочей поверхности палыха 4 и после полного выведения палец 4 занимает на желобе Ю положение, при кото ром ось пальца 4 направлена в центр отверстия 8, а поверхности отверстий 8 и пальца 4 ксяшентричны Это позволяет в дальнейшем легко завести палец в отверстие 8. Поскольку пластины 7 с от верстиями 8, а вместе с ними и желоб 1O2 S 10 наклонены, палец 4 имеет тенденцню осксшьзнуть с желоба Ю. Для предотращения схх кальзывания на желобе 1О становлены механизмы удержания паль а 4 в крайнем выдвинутом положении, каждый из котврых выполнен в виде дйуплечего рычага 12. До выведения пальца 4 из отверстий 8 ,- рычаги 12 поворотом на юс осях откидываются наружу, при этом наружный конец рычага, прейставляющий собой ручку 13 является рдновременно упором от дальней, шего его проворота. После выведения пальпа 4 в крайнее положение рычаг 12- поворачивается в обратном направлении и своим внутреннюю концом, вьшолненным в виде контргруза 14, для предотвращения случайного рас . . крытия рычага 12 входит в .зацепление с уртом 15 переставляемого пальца 4.. После этого каретка 6 вместе с водялом 9, желобом 1О и пальцем 4 перемещается на новое щтатное место, В дальнейшем рычаг 12 отесывается наружу, палец 4 опускается по 1О в новую пару отверстий 8,. закрепляется от выпадания, после чего производится подьем груза. Применение предлагаемой на траверсе данного устройства позволяет надежно удерживать палец в крайнем выдвинутом положении, что повышает удобство траверсы в эксш1уатацин.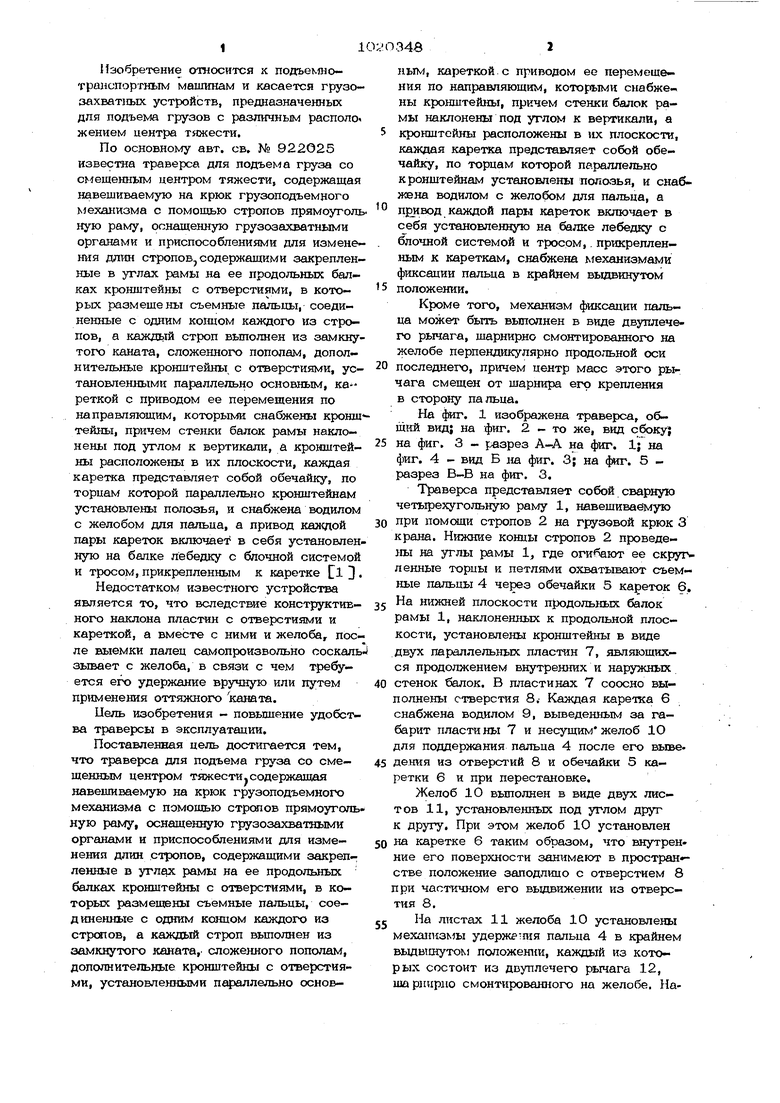
| название | год | авторы | номер документа |
|---|---|---|---|
| Траверса для подъема груза со смещенным центром тяжести | 1980 |
|
SU922025A2 |
| Траверса для грузов со смещеннымцЕНТРОМ ТяжЕСТи | 1979 |
|
SU819042A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| НАВЕСНОЕ БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОГРУЗЧИКА | 1991 |
|
RU2011762C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2003 |
|
RU2245292C2 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| Траверса модульная | 2017 |
|
RU2653911C1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Устройство для подъема и подачи грузов в проемы здания | 1991 |
|
SU1821442A1 |
1. ТРАВЕРСА ДЛЯ ПОДЪЕМА ГРУЗА СО СМЕЩЕННЫМ ЦЕНТРОМ ТЯЖЕСга по авт. св. J 922О25, о тл вчающаяся тем, что, с целью повышения удобства в эксплуатации, она снабжена механизмами фиксации пальца в крайнем вьздвинутом положении. 2. Т иверса по п. 1, отличающая с я тем, что механизм фиксации пальца вьшолнен в виде двуплечегю рычага, шар. нирно смонтированного на желобе пертенди; кулярно продольной оси последнего, причем центр масс этотх рычага смещен от шарнира его крепления в сторону пальца. (Л с 1C о оэ 00
puг.f
