(Л
С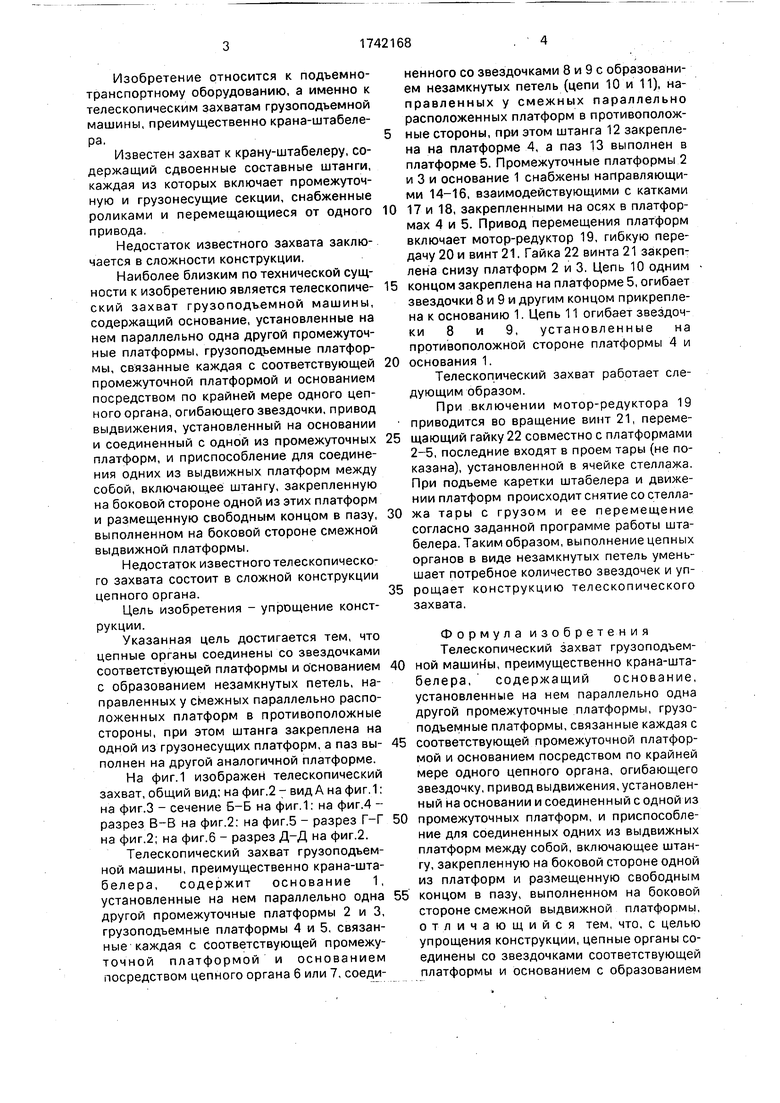
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1990 |
|
SU1773814A1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Механизированный склад | 1989 |
|
SU1689231A1 |
| Грузоподъемная платформа крана-штабелера | 1987 |
|
SU1416386A1 |
| Стеллажный кран-штабелер | 1988 |
|
SU1643338A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
Изобретение относится к подъемно- транспортному оборудованию и касается конструкции телескопического захвата крана-штабелера. Целью изобретения является упрощение конструкции захвата. Телескопический захват содержит основание 1 и платформы. При включении мотор-редуктора 19 приводится во вращение винт 21, перемещающий гайку 22 совместно с платформами, которые входят в проем тары, установленной в ячейке стеллажа. При подъеме каретки штабелера и движении платформ тара снимается со стеллажа. Выполнение цепных органов в виде незамкнутых петель уменьшает потребное количество звездочек и тем самым упрощает конструкцию захвата. 6 ил.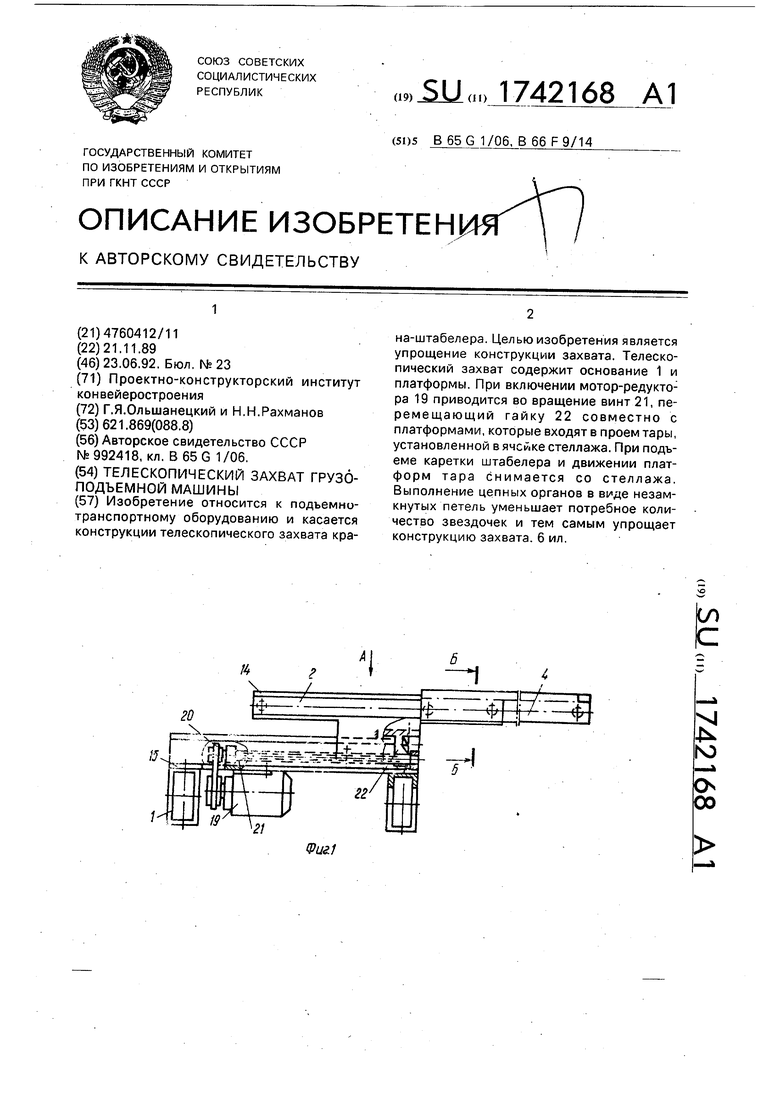
Изобретение относится к подъемно- транспортному оборудованию, а именно к телескопическим захватам грузоподъемной машины, преимущественно крана-штабеле- ра.
Известен захват к крану-штабелеру, содержащий сдвоенные составные штанги, каждая из которых включает промежуточную и грузонесущие секции, снабженные роликами и перемещающиеся от одного привода.
Недостаток известного захвата заключается в сложности конструкции.
Наиболее близким по технической сущности к изобретению является телескопический захват грузоподъемной машины, содержащий основание, установленные на нем параллельно одна другой промежуточные платформы, грузоподъемные платформы, связанные каждая с соответствующей промежуточной платформой и основанием посредством по крайней мере одного цепного органа, огибающего звездочки, привод выдвижения, установленный на основании и соединенный с одной из промежуточных платформ, и приспособление для соединения одних из выдвижных платформ между собой, включающее штангу, закрепленную на боковой стороне одной из этих платформ и размещенную свободным концом в пазу, выполненном на боковой стороне смежной выдвижной платформы.
Недостаток известного телескопического захвата состоит в сложной конструкции цепного органа.
Цель изобретения - упрощение конструкции.
Указанная цель достигается тем, что цепные органы соединены со звездочками соответствующей платформы и основанием с образованием незамкнутых петель, направленных у смежных параллельно расположенных платформ в противоположные стороны, при этом штанга закреплена на одной из грузонесущих платформ, а паз выполнен на другой аналогичной платформе.
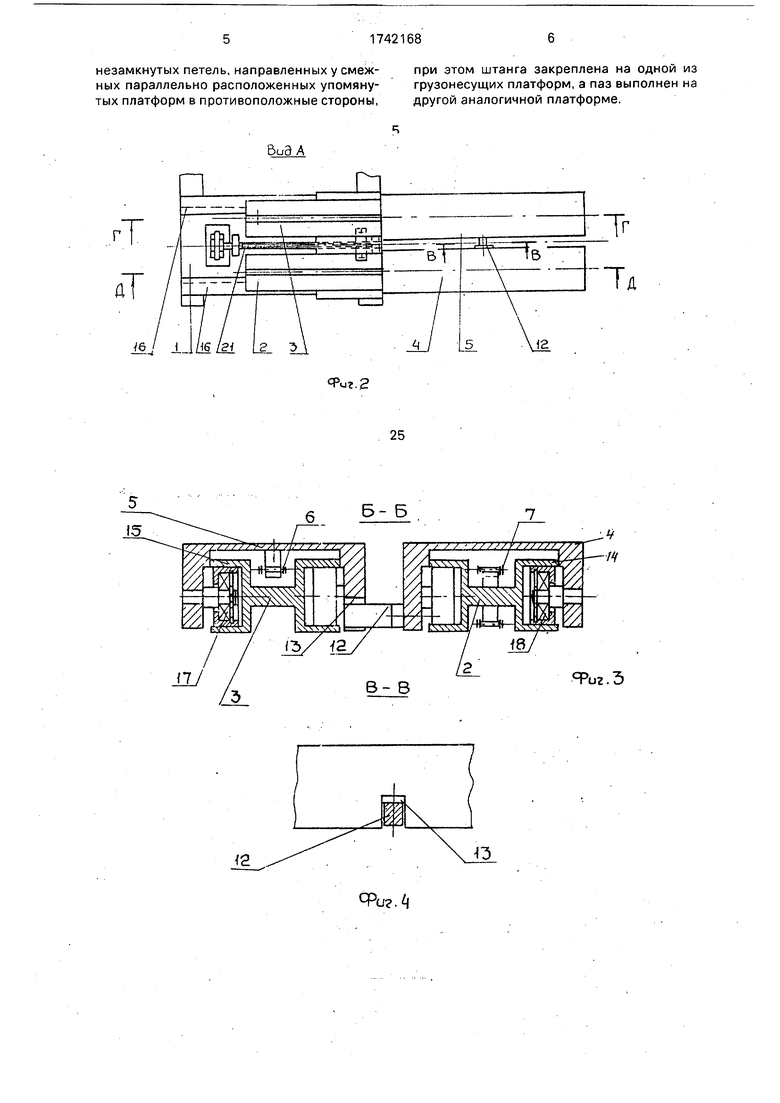
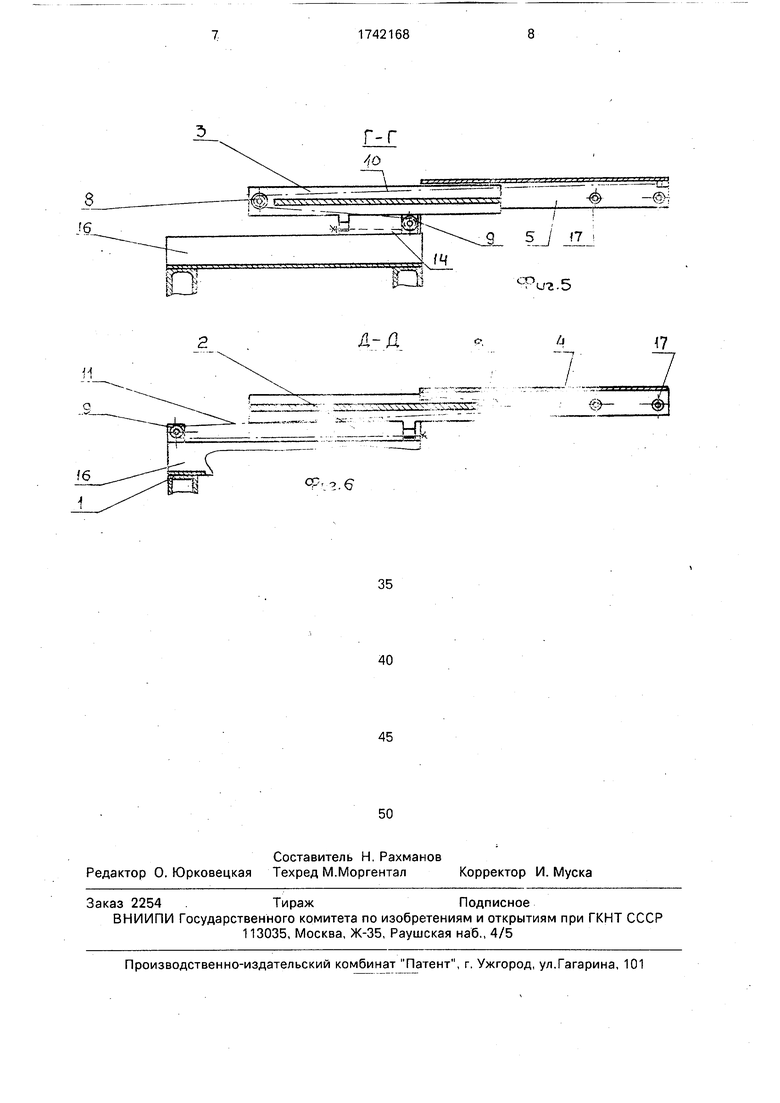
На фиг.1 изображен телескопический захват, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг.1: на фиг.4 - разрез В-В на фиг.2: на фиг.5 - разрез Г-Г на фиг.2: на фиг.6 - разрез Д-Д на фиг.2.
Телескопический захват грузоподъемной машины, преимущественно крана-шта- белера, содержит основание 1, установленные на нем параллельно одна другой промежуточные платформы 2 и 3, грузоподъемные платформы 4 и 5, связанные каждая с соответствующей промежуточной платформой и основанием посредством цепного органа 6 или 7, соединенного со звездочками 8 и 9 с образованием незамкнутых петель (цепи 10 и 11), направленных у смежных параллельно расположенных платформ в противоположные стороны, при этом штанга 12 закреплена на платформе 4, а паз 13 выполнен в платформе 5. Промежуточные платформы 2 и 3 и основание 1 снабжены направляющими 14-16, взаимодействующими с катками
17 и 18, закрепленными на осях в платформах 4 и 5. Привод перемещения платформ включает мотор-редуктор 19, гибкую передачу 20 и винт 21. Гайка 22 винта 21 закреплена снизу платформ 2 и 3. Цепь 10 одним
концом закреплена на платформе 5, огибает звездочки 8 и 9 и другим концом прикреплена к основанию 1. Цепь 11 огибает звездочки 8 и 9, установленные на противоположной стороне платформы 4 и
основания 1.
Телескопический захват работает следующим образом.
При включении мотор-редуктора 19 приводится во вращение винт 21, перемещающий гайку 22 совместно с платформами 2-5, последние входят в проем тары (не показана), установленной в ячейке стеллажа. При подъеме каретки штабелера и движении платформ происходит снятие со стеллажа тары с грузом и ее перемещение согласно заданной программе работы штабелера. Таким образом, выполнение цепных органов в виде незамкнутых петель уменьшает потребное количество звездочек и упрощает конструкцию телескопического захвата.
Формула изобретения Телескопический захват грузоподъемной машины, преимущественно крана-шта- белера, содержащий основание, установленные на нем параллельно одна другой промежуточные платформы, грузоподъемные платформы, связанные каждая с
соответствующей промежуточной платформой и основанием посредством по крайней мере одного цепного органа, огибающего звездочку, привод выдвижения, установленный на основании и соединенный с одной из
промежуточных платформ, и приспособление для соединенных одних из выдвижных платформ между собой, включающее штангу, закрепленную на боковой стороне одной из платформ и размещенную свободным
концом в пазу, выполненном на боковой стороне смежной выдвижной платформы, отличающийся тем, что, с целью упрощения конструкции, цепные органы соединены со звездочками соответствующей платформы и основанием с образованием
незамкнутых петель, направленных у смеж- при этом штанга закреплена на одной из ных параллельно расположенных упомяну- грузонесущих платформ, а паз выполнен на тых платформ в противоположные стороны, другой аналогичной платформе.
гТ
дТ
&1 1
иг.2
2
Тг
Тд
;Ч
Фиг.5
А
IL
ь
Фи.
8
6
нгт
п
°р .6
9 5 / Г7
.5
а-д
с
/J
17
ГГ Т.чл.
| Захват к крану-штабелеру | 1980 |
|
SU992418A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
