§
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРСМЙ1СТВО ДЛЯ ПРОГРАММНОТО УПРАВЛЕНИЯ | 1978 |
|
SU826282A1 |
| Устройство для регулирования расходов компонентов при смешении | 1977 |
|
SU696422A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство цифроаналогового преобразования | 1985 |
|
SU1361716A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
1
QI ЬЭ
Изобретение относится к автоматическому регулированию, может быть использовано в позиционных системах программного управления станками,
По основному авт. св. № 826282 извесГно устройство для программного управления, содержащее последовательно соединенные блок ввода программы, интерполятор, цифро-аналоговый преобразователь, регулятор скорости, к второму входу которого подключен выход тахогенератора, соединенного с объектом, выход которого подключен к второму входу цифро-аналогового преобразователя, а также ключ, последовательно соединенные сумматор и первый релейный элемент, последовательно соединенные второй релейный элемент, блок переменных коэффициентов и третий релейный элемент, последовательно соединенные четвертый релейный элемент и элемент И, второй вход которого соединен с выходом третьего релейного элемента, выход - с первым входом ключа, второй и третий .входы которого соединены соответственно с выходами первого релейного элемента и регулятора скорости, первый вход которого соединен с первыми входами сумматора, второго релейного элемента и вторым входом третьего релейного элемента, а выход тахогенератора соединен с вторым входом сумматора и первым входом первого релейного элемента, второй выход которого подключен к третьему входу сумматора 1.
Недостатком известного устройства является невысокое быстродействие, обусловленное тем, что величина форсиоующего сигнала, подаваемого на объект управления (исполнительный двигатель), выбирается независимо от количества отверстий, которое необходимо просверлить в соответствии с программой.
Цель изобретения увеличение быстродействия устройства.
Поставленная цель достигается тем что в устройство для программного управления введены блок делителей и блок ограничения, причем второй вход ключа соединен с выходом первого релейного элемента через блок ограничения, выход тахогенератора и третий выход блока переменных коэффициентов соединены через блок делителей со вторым и третьим входами сумматора соответственно, а управляющие входы
блока делителей и блока ограничения соединены с вторым выходом интерполятора.
Такое устройство позволяет задавать величину форсирующего сигнала на исполнительный двигатель в зависимости от количества отверстий, которое необходимо просверлить. При этом выполняются ограничения по нагреву исполнительного двигателя и повышается быстродействие устройства.
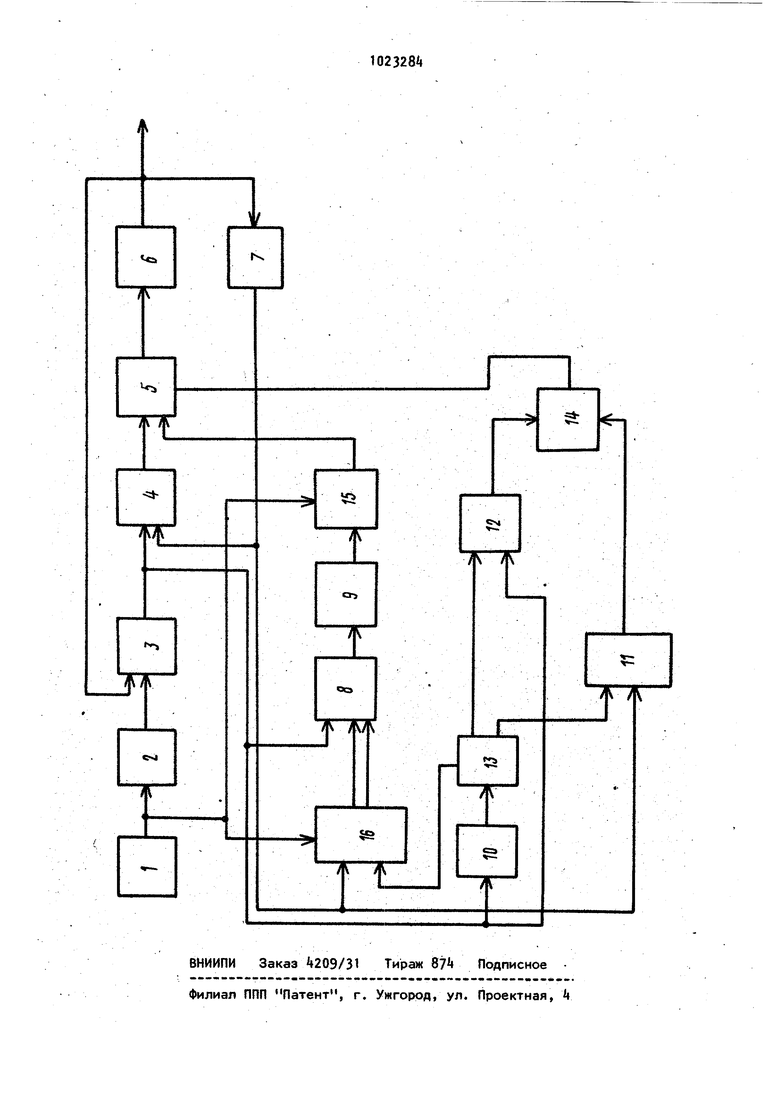
На чертеже изображена функциональная схема устройства.
Устройство содержит блок 1 ввода, интерполятор 2, цифро-аналоговый преобразователь 3 регулятор скорости, ключ 5 объект 6 управления, тахогенератор 7, сумматор 8, первый релейный элемент 9, второй релейный элемент 10, третий релейный элемент 11, четвертый релейный элемент 12, блок 13 переменных коэффициентов, элемент И i, бло1 15 ограничения, блок 16 делителей.
Устройство работает следующим образом.
1 Информация очередного кадра программы подается из блока 1 ввОда в интерполятор 2 и в блоки 16 делителей и 15 ограничения. Указанная информация помимо данных о требуемом перемещении объекта 6 управления содержит также данные о группе, к которой относится обрабатываемая плата, 5 в зависимости от количества отверстий.
Информация о требуемом перемещении свыхода интерполятора 2 поступает ка первый вход цифро-аналогового преобразователя 3 на второй вход которого поступает информация о действительном положении объекта 6 управления. В цифро-аналоговом преобразователе 3 вычисляется ошибка по положению следящей системы и преобразуется в аналоговую величину. Аналоговый сигнал ошибки поступает на вход регулятора скорости и сумматора 8. На выходе сумматора 8 формируется управляющий сигнал
U--X- Ki)i:- l aSiewX, (1)
где У, - сигнал ошибки;
( - сигнал скорости изменения , ошибки;
SlgHX - знак сигнала ошибки; L - управляющая функция; К и весовые коэффициенты.
На второй и третий входы сумматора 8 сигнал X поступает с «выхода тахогенератора 7, а сигнал singix - с выхода второго релейного элемента tО через блок 13 переменных коэффициентов и блок 1б делителей.
При на объект 6 управления с шлхода первого релейного элемента 9 через блок 15 ограничения и замкнутый ключ 5 подается разгоняющий форсирующий сигнал +UA. При 1X0 на объект 6 управления подается тормозящий форсирующий сигнал Нф.
Сигнал с выхода элемента ИИ, отключающий сигнал с выхода блока 15 ограничения и включающий сигнал с выхода регулятора скорости, т.е. включающий линейную следящую систему, формируется вторым релейным элементом 10, блоком 13 переменных коэффициентов, третьим 1J и четвертым 12 релейными элементами и элементом И И при выполнении следующих условий
SXC)C,i
Н
W
,, tt/3icX7Q,
- границы области работы
линейной следящей системы. игналы X и X поступают на втбвходы третьего 11 и четвертого
12 релейных элементов с второго и первого выходов блока 13 переменных коэффициентов. Блок 1 ввода выдает код группы, к которой относится оёрабатываемая плита, на блок 16 делителей и блок-15 ограничения.
Блок 15 ограничения, включенный например, в виде делителя, управляемого кодом, устанавливает допустимую согласно ограничению по нагреву для данной группы, величину форсирующего сигнала Цф (ограничивает по амплитуд, сигнал с выхода первого релейного элемента 9).
Так как изменение величины UA вызывает изменение величины ускорения, развиваемого в объекте управления, .е. приводит к изменению динамики бъекта управления, то блок 16 делителей, выполненный также, например в видеделителя, управляемого кодом, изменяет весовые, коэффициенты (Х и К,;) сигналов X и sign х при формировании управляющего сигнала L. Весовые коэффициенты изменяются таким бразом, чтобы обеспечить высокое качество переходного процесса (высокое быстродействие и отсутствие перерегулирования).
Предлагаемое устройство позволяет намительно сократить время обработки .х плат.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРСМЙ1СТВО ДЛЯ ПРОГРАММНОТО УПРАВЛЕНИЯ | 1978 |
|
SU826282A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
