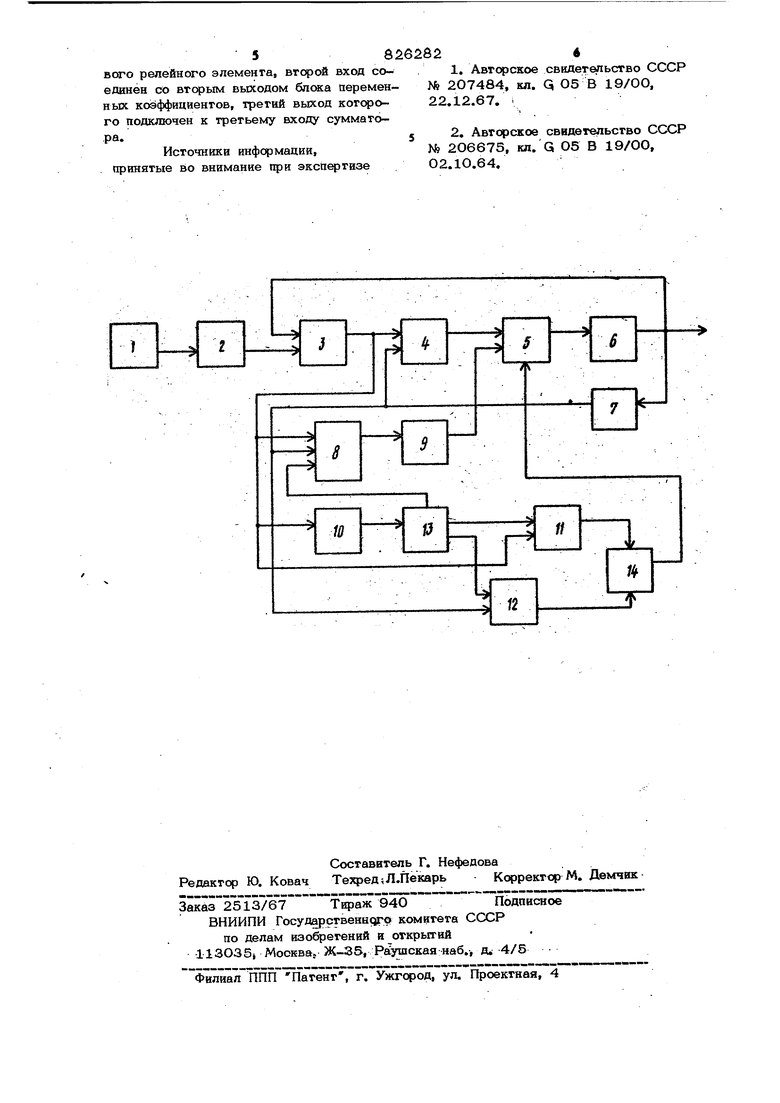
Изобретение огносигся к авгоматиче-чскому регулированию и можег бьхтъ использовано в позиционных системах программного управления станками. Известно устройство программного управления станками с автоматическим вычислением момента начала торможения, содержащее блок задания программы, блок .задания скорости и последовательно соединенные клапан, счетчик задания числа импульсов, схему пересчета, счетчик опре деления момента начала торможения, динамический триггер и ключ }. Недостатками этого устройства являют ся большой объем электронного оборудования, сложность отработки нечетных величин заданных перемещений и низкие динамическая точность и быстродействие всей системы программного управления. Известна дискретная позиционная система прсмграммного управления на феррит транзисторных элементах, содержащая Дат чик приращений перемещений, устройство ввода,-счетчик перемещений, устройство управления вводом дополантелыюго кода заданного перемещения и кодов снижения скорости в счетчике, устрсЛство фиксации ;находящихся в счетчике кодов снижения v сксфости 2, Однако при динамических искажениях информации о координатах следящей системы увеличивается колебательность системы, ухудшается помесоустсЛчввость, пони1жается быстродействие системы. Цепь изобретения - увеличение быстродействия и динами ческсА точности устрой;ства. Поставленная цель достигается тем, что в устройство, содержащее после;дсвательнЬ соединенные блок ввода программы, интерполятор ци рсшналоговый 1феобразователь, регулятор скорости, ко второму входу которого подключен выход тахогенератора, соединенного с объектом, выход котор я о подключен ко второму входу цифроаиалогового прео азователя, .дополнительно введены ключ, последова,тельно соединенные сумматор и первый ; релейный элемент, последовательно соединенные второй релейный элеменг, блок переменных коэффициенгов и трегнй репейный элемент, последовательно соединенные четвертый релейный элеменг и элемент И, второй вход которого соединен с выходом третьего релейного элемента, выход - с первым входом ключа, второй, и третий входы которого соединены соответственно с выходами первого релейного элемента и регулятора скорости, первый вход которого соединен с первыми входами сумматора, второго релейного элемента и вторым входом третьего релейного элемента, а выход тахогенератЬра соединен со вторым входом сумматора к первым входом .первого релейного элемента, второй вход соединен со вторым выходом блока перем нных коэффициентов, третий выход кото рого подключен к третьему входу сумматора. На чертеже изображена -структурная схема устройства для программного управ ления. Устройство для программного управления содержит блок 1 ввода программы, ин терполятор 2, цифроаналоговый преобразователь 3, регулятор 4. скорости, ключ 5, объект 6 управления, тахогенератор 7, сумматор 8, первый, второй, трегнй и чет вертый релейные элементы 9-12, блок 13 переменных коэффициентов, элемент И 14. Устройство для программного управления работает следующим образом. После ввода очередного кадра информации в блок 1 ввода программы, с выхода которого информация поступает в интерполятор 2 в виде десятичного кода, где преобразуется в параллельный двоичный или в двоично-десятичный код в зависимости от структуры цифроаналогового преобразователя 3. Этот код затем поступает на кодовый вход цифроаналогового преобразователя 3, а с его выхода, сигнал ошибки по положению поступает на вход регулятора 4 скорости-и сумматора 8, На выходе сумматора 8 формируется управляющий сигнал LT),SiCnX, где Ь -; управляющая функция; X ошибки; Х- сигнал скфости изменения ошибки; X - знак сигнала ошибки. При LI О на объект 6 управления че :рез замкнутый ключ 5 подается разгоняю ;щий форсирующий сигнал- Оф , При U О срабатьшает первый. релейный элемент 9 И на обьект управления подается форсирующий тормооящий сигнал-Сф . Сигнал на выходе схемы И 14, отключающий сигнал с выхода первого релейного элемента 9 и включающий сигнал с выхода регулятора 4. скорости, т.е. включающий обычную линейную следящую систему, формируется при выпошнении следующих условий: ixuxfХ Х ,при , , где У - эталоннъ значения, при достижении которых система работает в линейном режиме. Благодаря такой логике работы появляется возможность попадания изображающей точки в выбранную из соображений получения высокой динамической точности область фазовой плоскости координат следящей системы. Предлагаемое устройство повышает быстродействие систем по сравнению с известными на 45% и уменьшает динамические ошибки приблизительно в 2 раза. Формула изобретения Устройство для программного управления, содержащее последовательно соединенные блок ввода программы, интерполятор, цифроаналоговьй преобразователь, регулятор скорости, ко втфому входу которого подключен выхсй тахогенератора, соединенного с объектом, выход которого подключен ко второму входу цифроаналогового преобразователя, отличающееся тем, что, с целью повышения динамической точности и бьютродействйя устройства, в него введены ключ, последовательно соединенные сумматор и первьй ре лейный элемент, последовательно соединенные второй релейный элемент, блок переменнъос коэффициентов и третий релейный элемент, последовательно соединенные четвертый релейный элемент и элемент И, втфой вход которого соединен о выходом третьего релейного элемента, выход - с первым входом ключа, втфой и третий входа 1 которого соединены сответственно с выходами первого релейного элемента и регулятора скозрости, первый вход которого соединен с первыми входами сумматора, второго релейного элемента и вторым входом третьего релейного элемента, а выход тахогенератора соединен со вторым входом сумматора и первым входом первого релейного элемента, второй вход соединен со вторым выходом блсжа переменных коэффициентов, третий выход KOTC JOго подключен к третьему входу сумматора.
Источники информация, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 2О7484, кл. Q О5 В 19/ОО, 22.12.67. i
2.Авторское свидетельство СССР N9 206675, кл. G 05 В 19/ОО, 02.1О.64.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1980 |
|
SU1023284A2 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU746431A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
