Изобретение относится к устройствам для манипулирования изделиями с помощью барабанов, вращающихся столов и дисков, и более конкретно к автоматическим роторным линиям для комплектации групп предметов.
Известна автоматическая роторная линия комплектации групп предметов, содержащая вертикальные транспортный, комплектующий и рабочий роторы, причем транспортный ротор оснащен эквидистантно размещенными по его периферии носителями комплектуемых предметов, а комплектующий и рабочий роторы - соответствующими рабочими позициями, причем комплектующий ротор содержит держатели ряда предметов и средство передачи скомплектованных групп предметов в рабочий ротор 1.
Недостатком известной линии является невозможность комплектации многорядных групп предметов.
Целью изобретения является- расширение технологических возможностей за счет комплектации многорядных групп предметов.
Указанная. цель достигается тем, что автоматическая роторная линия комплектации групп предметов, содержит вертикальные транспортный, комплектующий и рабочий роторы, причем транспортный ротор оснащен эквидистантно размещенными по его периферии носителями комплектуемых предметов, а комплектующий и рабочий роторы соответствующими рабочими позициями, причем комплектующий ротор содержит держатели ряда предметов и средство передачи скомплектованных групп предметов в рабочий ротор, а каждая рабочая позиция комплектующего ротора снабжена емкостью, установленной с возможностью поступательного перемещения в вертикальной плоскости и расположенной под держателями ряда предметов, причем держатели ряда предметов установлены с возможностью возвратно-вращательного перемещения вокруг горизонтальной тангенциально расположенной оси и взаимодействия с соответствующей емкостью.
В каждой рабочей позиции комплектующего ротора емкость имеет в плане Собразный профиль, обращенный открытой стороной к периферии ротора, и заднюю стенку, установленную с возможностью радиального перемещения, причем средство передачи скомплектованных групп предметов в рабочий ротор представляет собой кулачково-рычажный механизм, расположенный с возможностью взаимодействия с задними стенками емкостей.
Кроме того, носители комплектуемых предметов в транспортном роторе выполнены в виде вертикальных цилиндрических магнитов и размещенных над и под ними
с возможностью горизонтального и радиального перемещения гребенс1(к, у которых число впадин равно количеству предметов в ряду, а выступы размещены в плане между
5 магнитами, в каждой рабочей позиции комплектующего ротора держатель выполнен в виде электромагнита с плоским рабочим торцом, соответствующим одному ряду предметов, причем транспортный ротор содерQ жит кулачково-рычажный механизм, установленный с возможностью последовательного взаимодействия с гребенками.
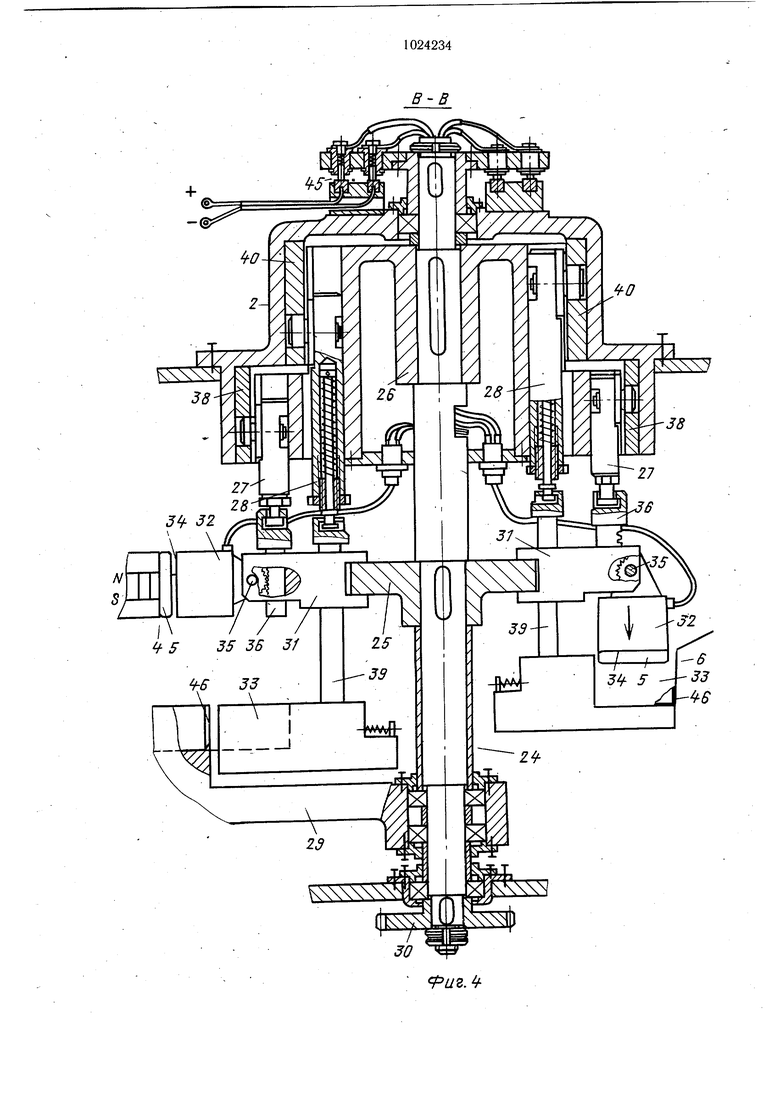
На фиг. 1 изображена автоматическая роторная линия, общий вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 -
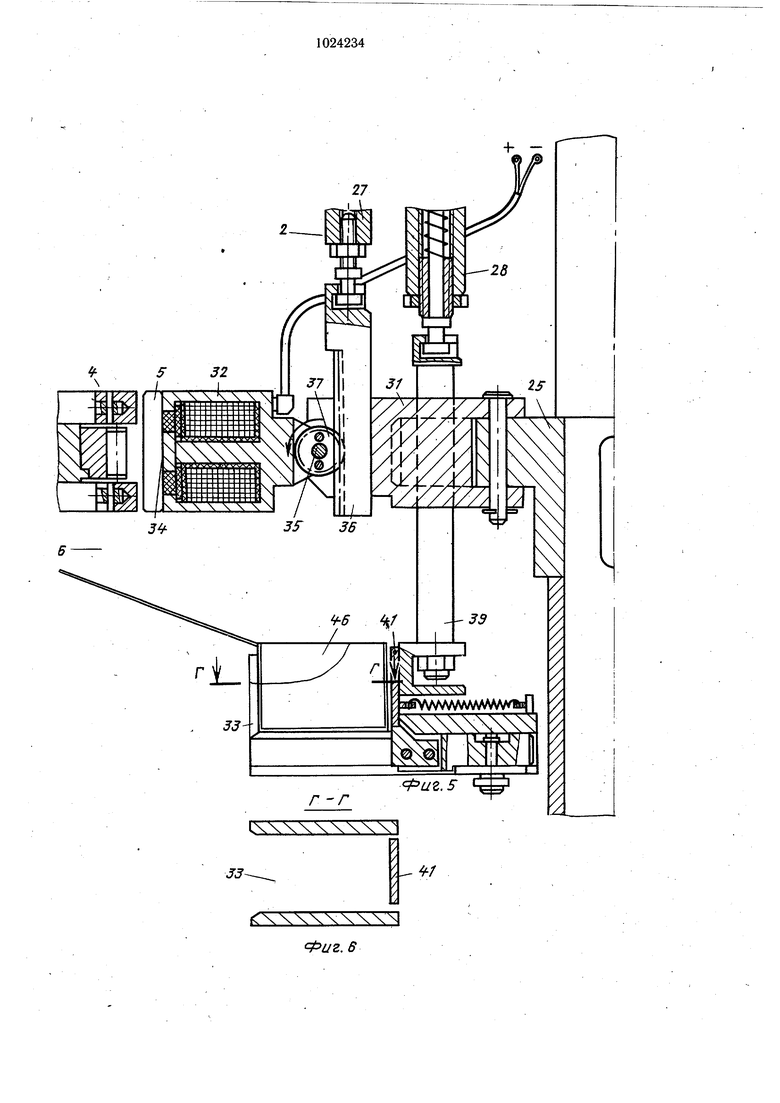
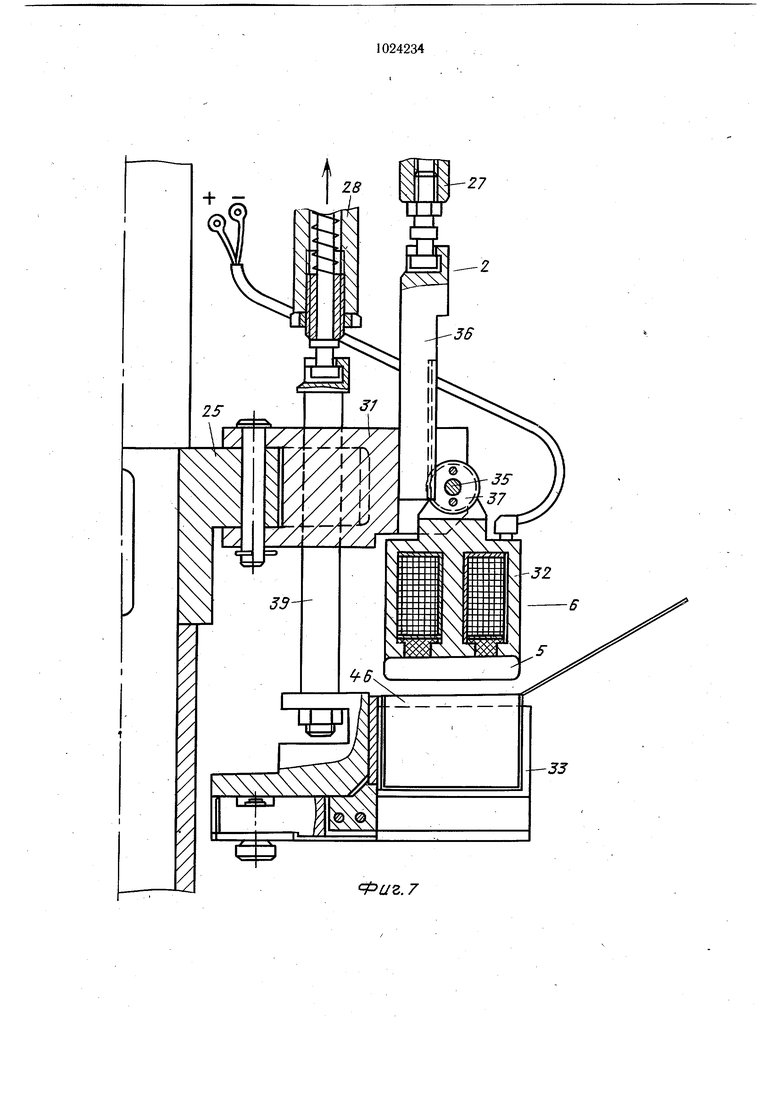
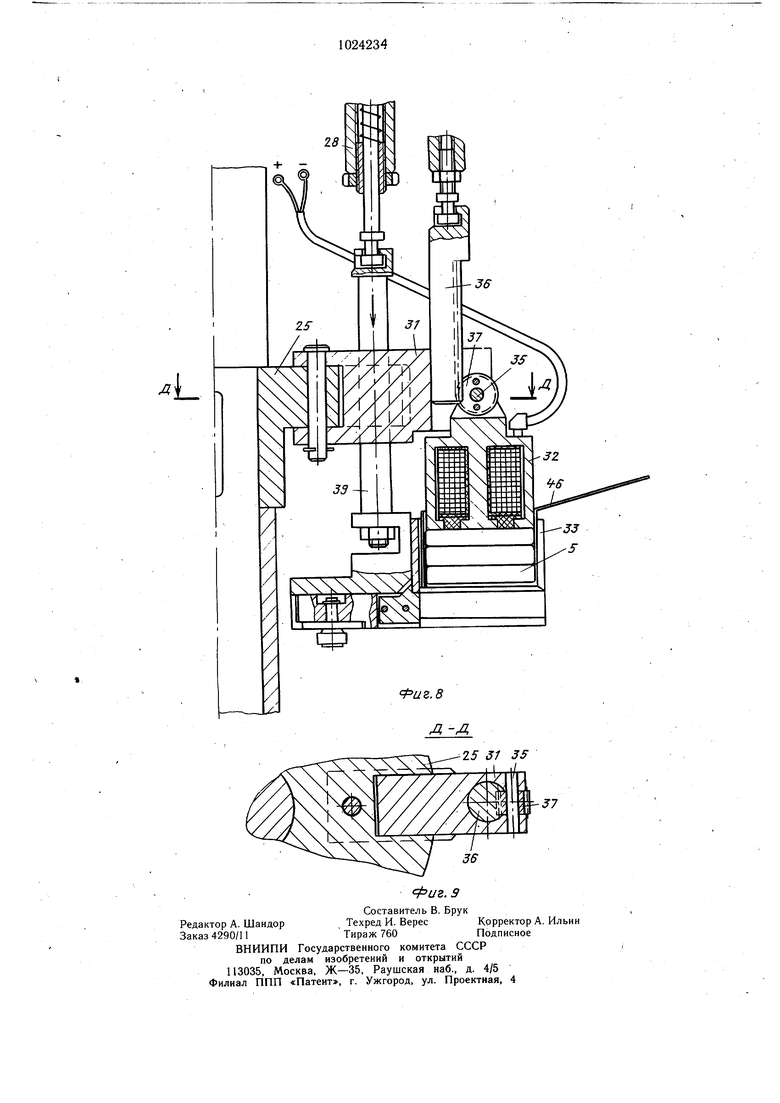
5 вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5, 7 и 8 - рабочая позиция комплектующего ротора на фиг. 4 последовательные положения; на фиг. 6 - разрез Г-Г на фиг. 5; на фиг. 9 - разрез Д-Д на фиг. 8.
Автоматическая роторная линия для комплектации продолговатых стальных предметов в многорядные группы, например, из 4-х рядов по 5-и предметов в ряду содержит три объединенные жесткой кинематической связью вертикальных ротора, а именно: транспортный ротор 1, комплектующий ротор 2 и рабочий ротор 3. Транспортный ротор 1 оснащен эквидистантно размещенными по его периферии носителями 4 комплектуемых предметов 5, комплектующий ротор 2 - рабочими позициями 6 для комплектации группы предметов 5, а рабочий ротор 3 - рабочими позициями 7 для упаковки скомплектованных групп 8 предметов 5. К транспортному ротору 1 примыкает
5 стационарный питатель 9 комплектуемыми предметами 5. Комплектующий ротор 2 снабжен средством 10 передачи скомплектованных групп 8 предметов 5 в рабочий ротор 3.
Транспортный ротор 1 представляет собой вертикальное вращаемое основание 11, несущее диск 12, по периферии которого закреплены вертикальные цилиндрические магниты 13. Над и под магнитами 13
5 размещены радиально перемещаемые гребенками 14, у которых число впадин 15 равно количеству предметов 5 в одном ряду комплектуемых групп, а именно пяти. Выступы 15 этих гребенок 14 размещены в плане между магнитами 13. Транспортный ротор 1 оснащен кулачково-рычажным механизмом 17, взаимодействующим последовательно с гребенками 14.Кулачок 18 этого механизма 17 жестко связан с вращаемым основанием 11 транспортного ротора 1, а коромысло 19 имеет вилкообразный рычаг 20 для быстрого перемещения гребенок 14 от центра ротора. В исходное положение гребенки 14 возвращаются пружинками 21. Вращаемое основание 11 снабжено шестерней 22, связанной с приводом линии (не показан) через вал 23.
Комплектующий ротор 2 представляет собой вертикаьное вращаемое основание 24 средняя часть которого - дисковый держатель 25 рабочих позиций 6, а верхняя - барабан 26 с двумя концентричными рядами ползунов 27 и 28 для управления рабочими позициями 6. Нижняя часть основания несет вращательно-возвратную каретку 29 для подачи тары в рабочие позиции 6 и имеет приводную шестерню 30.
Комплектующий ротор 2 имеет пять рабочих позиций 6 при четырех рядах в скомплектованной группе 10 предметов 5.
Рабочие позиции 6 комплектующего ротора 2 смонтированы в корпусах 31, которые легкосъемно установлены на дисковом держателе 25. Каждая рабочая позиция состоит из удерживателя 32 одного ряда предметов 5 и из расположенного ниже его емкости 33 комплектуемых групп предметов -5. Держатель 32 выполнен в виде электромагнита с плоским рабочим торцом 34, соответствующим одному ряду предметов 5.
Держатели 32 помещены в корпусах 31 на горизонтальных тангенциальных осях 35 и выполнены-с возможностью установки против носителей 4 транспортного ротора Г (фиг. 4, слева), и соответствующим емкостям 33 рабочих позиций 6 комплектующего ротора 2.
Держатели 32 устанавливаются ползунами 27, каждый из которых сочленен с рейкой 136, зацепленной с шестерней 37, которая присоединена к держателю 32 и насажена на ось 35; ползуны 27 приводятся в движение как толкатели от неподвижного пространственного кулачка 38, который установлен концентрично вращаемому основанию 24 комплектующего ротора 2.
Емкости 33 помещены в корпусах 31 на вертикальных штоках 39 и выполнены возвратно-поступательно перемещаемыми по вертикали. Емкости 33 перемещаются ползунами 28, которые сочленены со штоками 39 и приводятся в движение как толкатели от неподвижного пространственного кулачка 40, который установлен концентрично вращаемому основанию 24 комплектующего ротора 2.
Каждая емкость 33 имеет в плане Собразный профиль, обращенный открытой стороной к периферии комплектующего ротора2 и радиально перемещаемую заднюю стенку 41.
Средство 10 передачи скомплектованных групп 8 предметов 5 в рабочий ротор 3 из комплектующего ротора 2 выполнено в виде кулачково-рычажного механизма, взаимодействующего с задними стенками 41 емкостей 33 и срабатывающего через такое число оборотов комплектующего ротора 2,. которое равно отношению числа рядов
(четыре) в скомплектованной группе 8 к числу рабочих позиций 6 (пять) комплектующего ротора 2, т. е. через 4/5 его оборота. Кулачок 42 этого кулачково-рычаж5 ного механизма жестко связан с рабочим ротором 3, а коромысло 43 имеет рычаг 44 для быстрого перемещения задних стенок 41 емкостей 33 к периферии комплектующего ротора 2.
Верхняя часть ротора 2 представляет собой коллектор 45, который служит для периодического включения держателейэлектромагнитов 32.
Рабочий ротор 3 также выполнен в виде .вертикального вращаемого основания, несущего две рабочие позиции 7, которые предназначены для завершения упаковки скомплектованных групп 8 предметов 5, а именно, для закрывания тары - картонных коробок 46, их скрепления и т. д.
При включении линии роторы 1, 2 и 3
0 приводятся в непрерывное вращение. При
этом предметы 5 поступают из питателя 9
в носители 4 транспортного ротора 1 и раз-мещаются во впадинах 15 гребенок 14,
удерживаясь магнитами 13. В свою очередь,
5 кулачково-рычажный механизм 17, последовательно взаимодействуя с гребенками 14, передает предметы 5, ряд за рядом по пять щтук, из транспортного ротора 1 в комплектующий ротор 2 на держатели 32, которые установлены при этом рабочими торцами 34 против носителей 4 транспортного ротора 1. Для осуществления этой передачи углу «А. поворота транспортного ротора 1 соответствует угол поворота комплектующего ротора 2.
В то же время, в каретку 29 комплектующего ротора 2, пока она стоит в исходном положении, подается открытая сверху картонная коробка 46. Затем каретка 39 поворачивается вместе с ротором 2, находясь в радиальном направлении напротив одной из рабочих позиций 6 комплектующего ро0тора 2; во время этого поворота коробка 46 передается из каретки 29 в емкость 33 рабочей позиции 6. Далее каретка 29 поворачивается в обратном направлении и вновь останавливается в исходном положении,
5 после чего этот цикл непрерывно повторяется.
Итак, в .емкости 33 рабочих позиций 6 комплектующего ротора 2 последовательно подаются коробки 46, а на торцы 34 электромагнитов-держателей 32 этих позиций 6 -
0 один ряд комплектуемых предметов 5. Далее очередной держатель 32 с одним рядом предметов 5 повертывается соответствующим ползуном 27 вокруг горизонтальной тангенциальной оси 36 и устанавливается соосно емкости 33 этой рабочей позиции 6.
После этого емкость 33 перемещается по вертикали вверх соответствующим ползуном 28, благодаря чему этот ряд предметов 5 опускается в коробку 46. Когда этот ряд
достигнет дна коробки 46, держатель 32 отключается от электросети коллектором 45 и первый (нижний) ряд предметов 45 укладывается на дно коробки 46. Затем ем. кость 33 перемещается по вертикали вниз, благодаря чему держатель 32 Е1ыходит из него, после чего поворачивается вокруг горизонтальной тангенциальной оси 35 в обратном направлении, вновь включается в электросеть коллектором 45, принимает из транспортного ротора 1 второй ряд предметов 5 и т. д.
Когда в первой рабочей позиции 6 комплектуюнхего ротора 2 уже будет скомплектованная группа 8 из четырех рядов предметов 5, то во второй позиции 6 будет находиться комплектуемая группа из трех рядов, а в третьей позиции 6 - из двух рядов, и в нее будет подаваться третий ряд предметов, в четвертой позиции 6 будет находиться комплектуемая группа из двух предметов,, а в пятой позиции 6 - из одного. Средство передачи скомплектованных групп предметов 10 выполненное, например, в виде кулачково-рычажного механизма, взаимодействуя с задней стенокой 41 в
емкости 33 позиции 6, быстро переместит эту стенку 41 к периферии комплектующего ротора 2, а вместе с ней - коробку 46 с находящейся в ней скомплектованной группой 8 в соответствующую рабочую позицию 7 рабочего ротора, где эта коробка 46 будет закрыта и запечатана.
Следующая передача скомплектованной группы 8 из комплектующего ротора 2 в
рабочий ротор 3 произойдет через 4/5 оборота комплектующего ротора 2(4 число рядов в скомплектованной группе, 8, 5 - число рабочих позиций комплектующего ро тора 2), т. е. из пятой рабочей позиции 6, в которой к этому времени добавится последний четвертый ряд предметов и образуется скомплектованная группа 8; между тем, в свободную первую позицию 6 будет подана описанным образом коробка 46 и один ряд предметов 5. Затем такая передача будет последовательно, произведена
из 4, 3 и 2 позиций 6, а затем вновь из первой позиции 6 и т. п.
Такое техническое рещение позволяет комплектовать многорядные группы предметов с заданным числом рядов.
А -А
Фиг. 2
вид Б
Фиг. 6 Ф с/г.7

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая роторная линия комплектации групп предметов | 1985 |
|
SU1315241A2 |
| Роторно-конвейерная машина | 1978 |
|
SU831627A1 |
| СПОСОБ КОМПЛЕКТАЦИИ ЗАДАННЫХ ГРУПП ОДИНАКОВЫХ ПРЕДМЕТОВ В АВТОМАТИЧЕСКОЙ РОТОРНОЙ ЛИНИИ | 1966 |
|
SU180080A1 |
| Машина для сборки клапанов аэрозольных упаковок | 1974 |
|
SU638019A1 |
| Рабочий ротор роторной машины | 1974 |
|
SU510387A1 |
| СПОСОБ КОМПЛЕКТАЦИИ ПРЕДМЕТОВ С ПРИМЕНЕНИЕМ СБОРОЧНЫХ РОТОРОВ | 1967 |
|
SU193886A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторно-конвейерная линия | 1980 |
|
SU952533A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Транспортно-накопительный участок автоматической линии | 1982 |
|
SU1044454A1 |


1. АВТОМАТИЧЕСКАЯ РОТОРНАЯ ЛИНИЯ КОМПЛЕКТАЦИИ ГРУПП ПРЕДМЕТОВ, содержащая вертикальные транспортный, комплектующий и рабочий роторы, причем транспортный ротор оснащен эквидистантно размещенными по его периферии носителями комплектуемых предметов, а комплектующий и рабочий роторы - соответствующими рабочими позициями, причем комплектующий, ротор содержит держатели ряда предметов и средство передачи скомплектованных групп предметов в рабочий ротор, отличающаяся тем, что, с целью расщирения технологических возможностей за счет комплектации многорядных групп предметов, каждая рабочая позиция комплектующего ротора снабжена емкостью, установленной с возможностью поступательного пе1эемещения в вертикальной плоскости и расположенной под держателями ряда предметов, причем держатели ряда предметов установлены с возможностью возвратно-вращательного перемещения вокруг горизонтальной тангенциально расположенной оси и взаимодействия с соответствующей емкостью. 2.Линия поП. 1, отличающаяся тем, что в каждой рабочей позиции комплектующего ротора емкость имеет .в плане С-образный профиль, обращенный открытой стороной к периферии ротора, и заднюю стенку, установленную с возможностью радиального перемещения, причем средство передачи скомплектованных групп предметов в рабочий ротор представляет собой кулачково-рычажный механизм, расположенный с возможностью взаимодействия с задни.ми стенками емкостей. 3.Линия по п. 1 или 2, отличающаяся тем, что, с целью манипулирования продолговатыми предметами из ферромагнитного материала, носители комплектуемых пред(S метов в транспотном роторе выполнены (Л в виде вертикальных цилиндрических магнитов и размещенных над и под ними с возможностью горизонтального и радиального перемещения гребенок, у которых число впадин равно количеству предметов в ряду, а выступы размещены между магнитами, в каждой рабочей позиции комплектующего ротора держатель выполнен в виде электромагнита с плоским рабочим торцом, соответствующим одному ряду предметов, to причем транспортный ротор, содержит кулачково-рычажный механизм, установлен4 IsD ный с возможностью последовательного взаимодействия с гребенками. СО 4 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборная оправка | 1928 |
|
SU18008A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
