i
СП
X
I
I
г-ч
I
I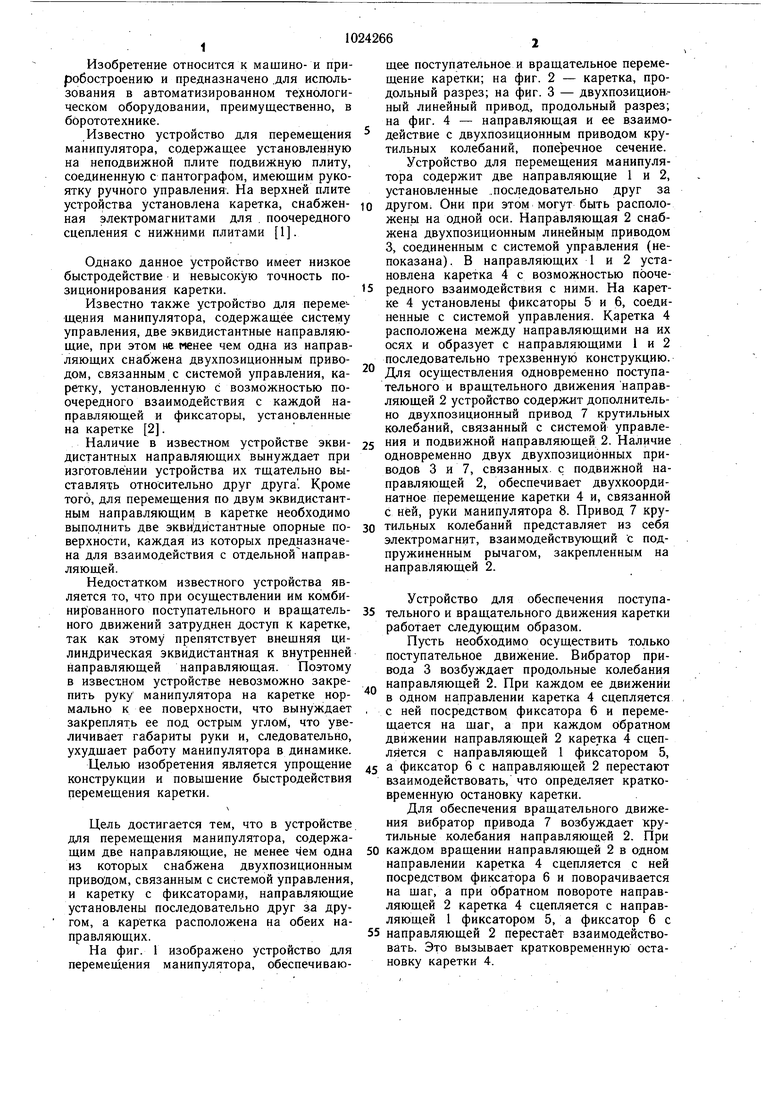
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения манипулятора | 1980 |
|
SU897496A1 |
| Устройство для перемещения,преимущественно,руки манипулятора | 1985 |
|
SU1291384A1 |
| Устройство для шагового перемещения манипулятора | 1988 |
|
SU1563964A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Привод микроманипулятора | 1986 |
|
SU1366386A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ, ПРЕИМУЩЕСТВЕННО РУКИ МАНИПУЛЯТОРА, содержащее две направляющие, при этом не менее чем одна из направляющих снабжена двухпозиционным приводом, связанным с системой управления, а также каретку и установленные на ней фиксаторы, отличающееся тем, что, с целью упрощения конструкции и повыщения быстродействия, направляющие установлены последовательно друг за другом, а каретка расположена на обеих направляющих. /у///////
I
/
/ ./
Изобретение относится к машино- и приробостроению и предназначено .для использования в автоматизированном те снологическом оборудовании, преимущественно, в борототехнике.
Известно устройство для перемещения манипулятора, содержащее установленную на неподвижной плите подвижную плиту, соединенную с пантографом, имеющим рукоятку ручного управления. На верхней плите устройства установлена каретка, снабженная электромагнитами для . поочередного сцепления с нижними плитами 1.
Однако данное устройство имеет низкое быстродействие и невысокую точность позиционирования каретки.
Известно также устройство для переме-ще.ния манипулятора, содержащее систему управления, две эквидистантные направляющие, при этом не менее чем одна из направляющих снабжена двухпозиционным приводом, связанным с системой управления, каретку, установленную с возможностью поочередного взаимодействия с каждой направляющей и фиксаторы, установленные на каретке 2.
Наличие в известном устройстве эквидистантных направляющих вынуждает при изготовлении устройства их тщательно выставлять относительно друг друга . Кроме того, для перемещения по двум эквидистантным направляющим в каретке необходимо выполнить две эквидистантные опорные поверхности, каждая из которых предназначена для взаимодействия с отдельнойнаправляющей.
Недостатком известного устройства является то, что при осуществлении им комбинированного поступательного и вращательного движений затруднен доступ к каретке, так как этому препятствует внещняя цилиндрическая эквидистантная к внутренней направляющей направляющая. Поэтому в известном устройстве невозможно закрепить руку манипулятора на каретке нормально к ее поверхности, что вынуждает закреплять ее под острым углом, что увеличивает габариты руки и, следовательно, ухудщает работу манипулятора в динамике.
Целью изобретения является упрощение конструкции и повыщение быстродействия перемещения каретки.
Цель достигается тем, что в устройстве для перемещения манипулятора, содержащим две направляющие, не менее чем одна из которых снабжена двухпозиционным приводом, связанным с системой управления, и каретку с фиксаторами, направляющие установлены последовательно друг за другом, а каретка расположена на обеих направляющих.
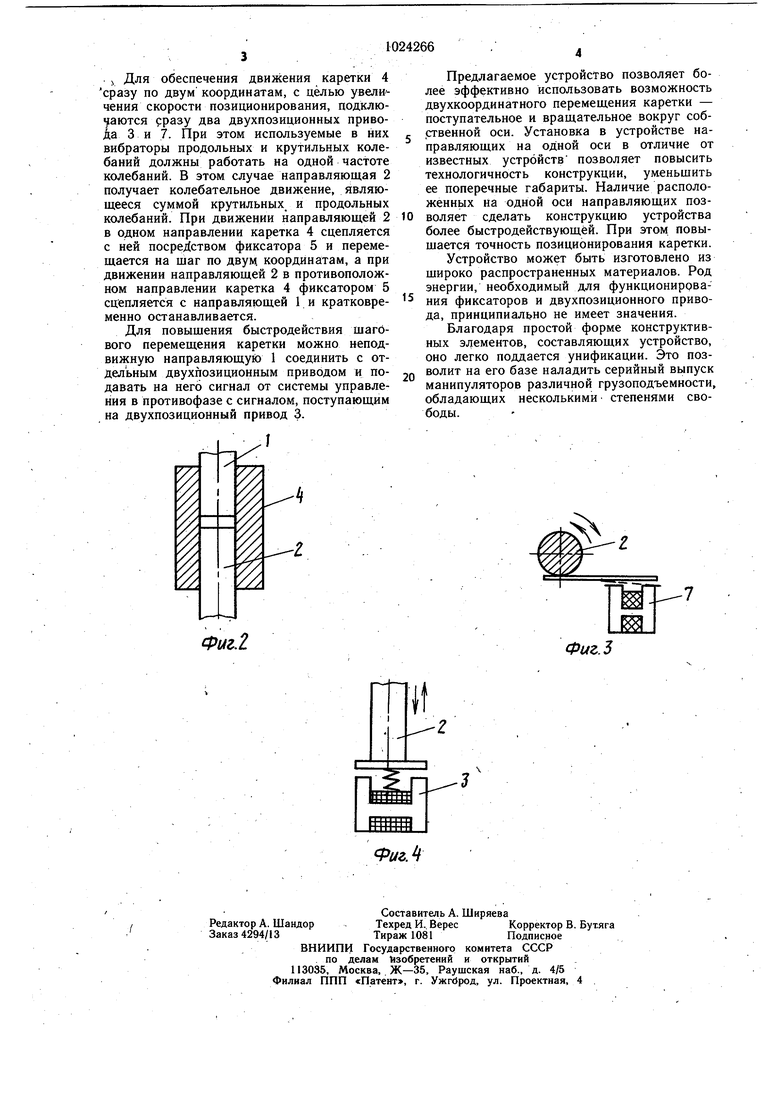
На фиг. 1 изображено устройство для перемец ения манипулятора, обеспечивающее поступательное и вращательное перемещение каретки; на фиг. 2 - каретка, продольный разрез; на фиг. 3 - двухпозицион.ный линейный привод, продольный разрез; на фиг. 4 - направляющая и ее взаимодействие с двухпозиционным приводом крутильных колебаний, поперечное сечение. Устройство для перемещения манипулятора содержит две направляющие 1 и 2, установленные .последовательно друг за
другом; Они при этом могут быть расположены на одной оси. Направляющая 2 снабжена двухпозиционным линейнырл приводом 3, соединенным с системой управления (непоказана). В направляющих 1 и 2 установлена каретка 4 с возможностью поочередного взаимодействия с ними. На каретке 4 установлены фиксаторы 5 и 6, соединенные с системой управления. Каретка 4 расположена между направляющими на их осях и образует с направляющими 1 и 2 последовательно трехзвенную конструкцию.
Для осуществления одновременно поступательного и вращтельного движения направляющей 2 устройство содержит дополнительно двухпозиционный привод 7 крутильных колебаний, связанный с системой управления и подвижной направляющей 2. Наличие одновременно двух двухпозиционных приводоб 3 и 7, связанных, с подвижной направляющей 2, обеспечивает двухкоординатное перемещение каретки 4 и, связанной с ней, руки манипулятора 8. Привод 7 крутильных колебаний представляет из себя электромагнит, взаимодействующий с подпружиненным рычагом, закрепленным на направляющей 2.
Устройство для обеспечения поступательного и вращательного Движения каретки работает следующим образом.
Пусть необходимо осуществить только поступательное движение. Вибратор привода 3 возбуждает продольные колебания направляющей 2. При каждом ее движении в одном направлении каретка 4 сцепляется с ней посредством фиксатора 6 и перемещается на щаг, а при каждом Обратном движении направляющей 2 каретка 4 сцепляется с направляющей 1 фиксатором 5, а фиксатор 6 с направляющей 2 перестают взаимодействовать, что определяет кратковременную остановку каретки.
Для обеспечения вращательного движения вибратор привода 7 возбуждает крутильные колебания направляющей 2. При каждом вращении направляющей 2 в одном направлении каретка 4 сцепляется с ней посредством фиксатора 6 и поворачивается на щаг, а при обратном повороте направляющей 2 каретка 4 сцепляется с направляющей 1 фиксатором 5, а фиксатор 6 с направляющей 2 перестаёт взаимодействовать. Это вызывает кратковременную остановку каретки 4.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ МИКРОЭЛЕМЕНТОВ | 0 |
|
SU276703A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ,2 | |||
| Устройство для перемещения манипулятора | 1980 |
|
SU897496A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
