Изобретение относится к машино- и приборостроению и предназначено для использования в автоматизированном технологическом оборудовании,- преимущественно в робототехнике, для осуществления шагового перемещения исполнительных органов.
Цель изобретения - упрощение конструкции за счет упрощения привода.
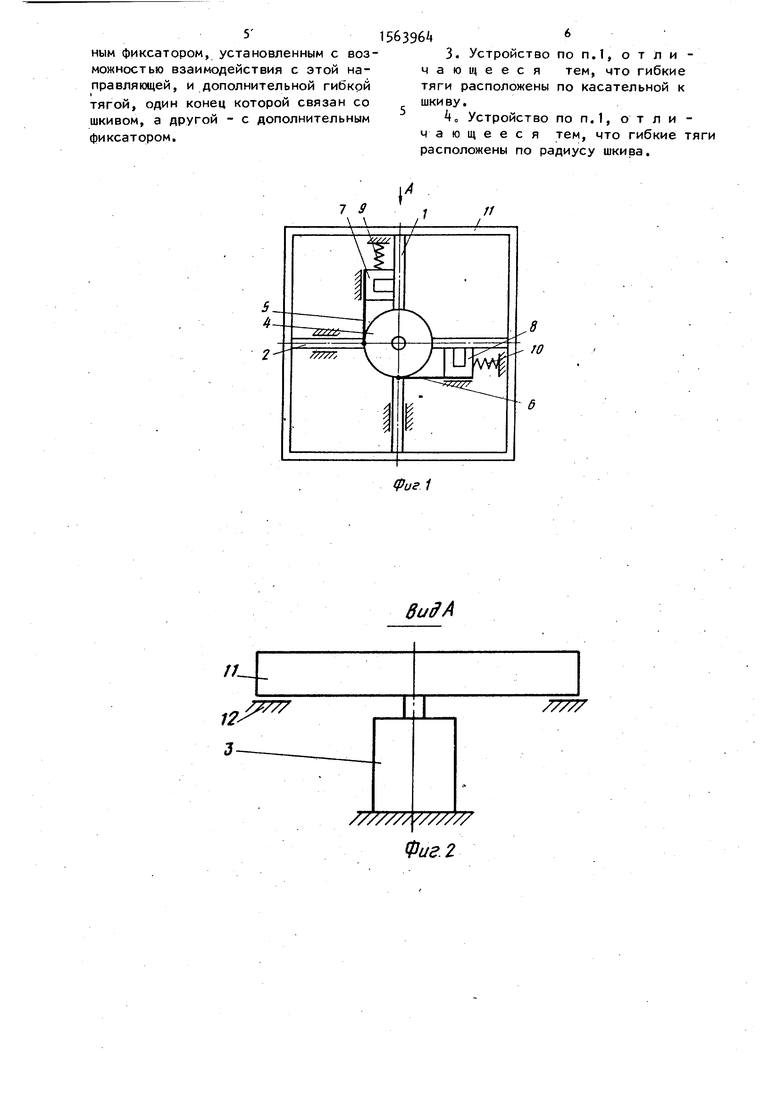
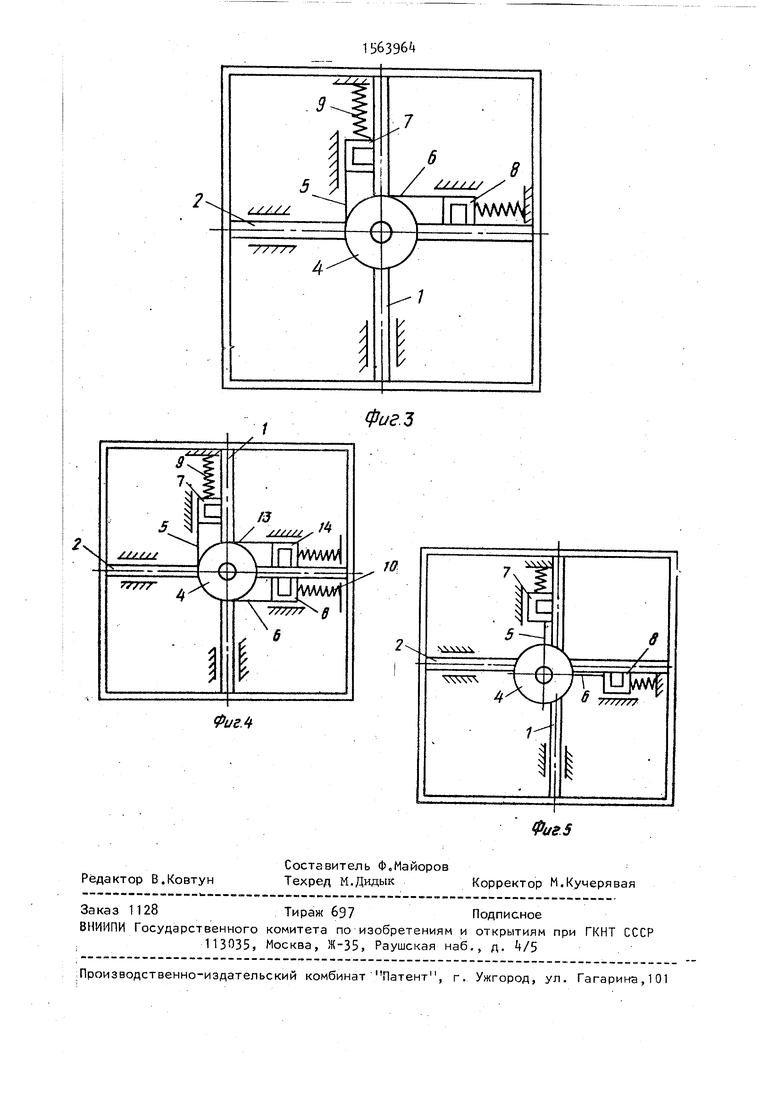
На фиг.1 изображено устройство для шагового перемещения манипулятора, общий вид; на фиг.2 - вид А на фиг„1; на фиг.З - вариант устройства, в котором гибкие тяги прикреплены к шкиву с возможностью одновременного перемещения фиксаторов;на фиг.ч - вариант устройства, в котором гибкие тяги
прикреплены к шкиву с возможностью поочередного перемещения фиксаторов; на фиг.5 - вариант устройства, в котором концы гибких тяг закреплены на шкиве перпендикулярно касательной в точке крепления.
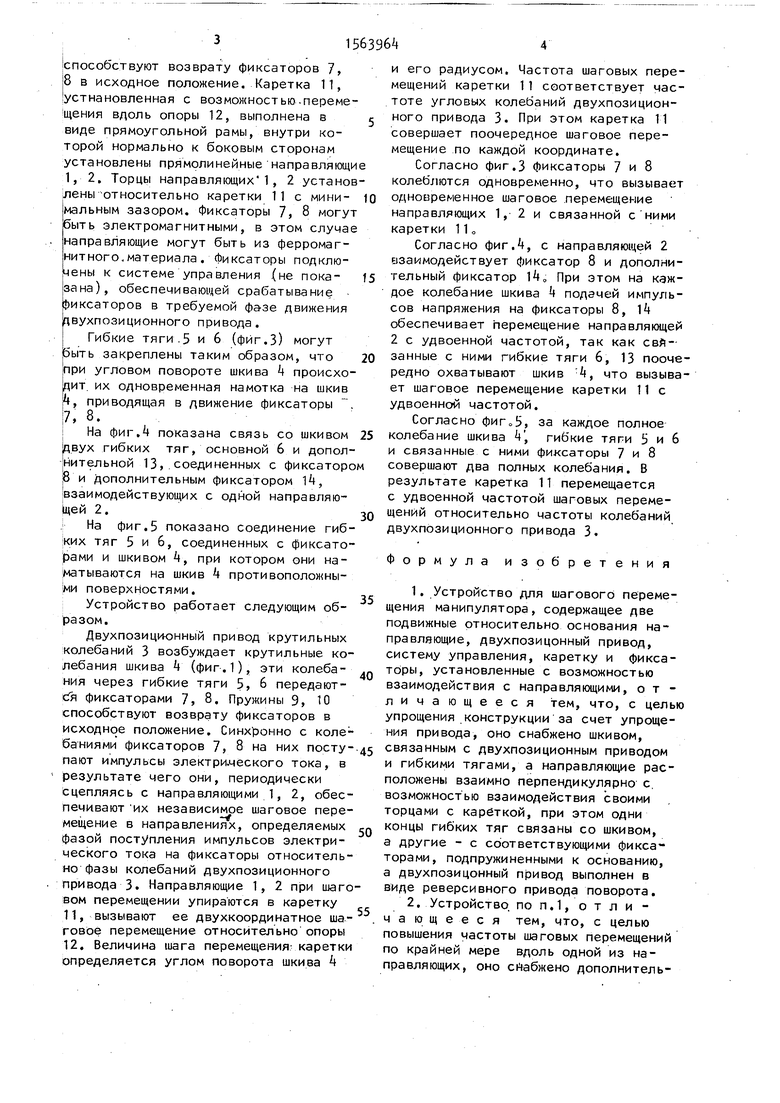
Устройство для шагового перемещения манипулятора содержит подвижные относительно основания и расположенные взаимно перпендикулярно направляющие 1 и 2, двухпозиционный реверсивный привод поворота 3, на котором закреплен шкив А, связанный с концами гибких тяг 5 и 6, расположенных вдоль направляющих 1 и 2. Другие концы тяг 5 и 6 соединены, соответственно, с фиксаторами 7 и 8. Пружины 9. 10
СУ
о
& ее
%
способствуют возврату фиксаторов 7, 8 в исходное положение. Каретка 11, устнановленная с возможностью.перемещения вдоль опоры 12, выполнена в виде прямоугольной рамы, внутри которой нормально к боковым сторонам установлены прямолинейные направляющие 1, 2. Торцы направляющих41, 2 установлены относительно каретки 11 с мини- мальным зазором. Фиксаторы 7, 8 могут быть электромагнитными, в этом случае направляющие могут быть из ферромагнитного.материала . Фиксаторы подключены к системе управления (не пока- зана), обеспечивающей срабатывание фиксаторов в требуемой фазе движения двухпозиционного привода.
Гибкие тяги 5 и 6 (фиг.З) могут быть закреплены таким образом, что при угловом повороте шкива 4 происходит их одновременная намотка на шкив 4, приводящая в движение фиксаторы . 7, 8.
На фиг.ч показана связь со шкивом двух гибких тяг, основной 6 и дополнительной 13, соединенных с фиксатором 8 и дополнительным фиксатором 14, взаимодействующих с одной направляющей 2.
На фиг.5 показано соединение гибких тяг 5 и 6, соединенных с фиксаторами и шкивом 4, при котором они наматываются на шкив 4 противоположными поверхностями.
Устройство работает следующим образом.
Двухпозиционный привод крутильных колебаний 3 возбуждает крутильные колебания шкива 4 (фиг.1), эти колеба- ния через гибкие тяги 5, 6 передаются фиксаторами 7, 8. Пружины 9, 10 способствуют возврату фиксаторов в исходное положение. Синхронно с колебаниями фиксаторов 7, 8 на них посту- пают импульсы электрического тока, в 1 результате чего они, периодически сцепляясь с направляющими 1, 2, обеспечивают их независимое шаговое перемещение в направлениях, определяемых фазой поступления импульсов электрического тока на фиксаторы относительно фазы колебаний двухпозиционного привода 3. Направляющие 1, 2 при шаговом перемещении упираются в каретку
11,вызывают ее двухкоординатное шаговое перемещение относительно опоры
12.Величина шага перемещения каретки определяется углом поворота шкива 4
0
Q 5 п
5
и его радиусом. Частота шаговых перемещений каретки 11 соответствует частоте угловых колебаний двухпозиционного привода 3. При этом каретка 11 совершает поочередное шаговое перемещение по каждой координате.
Согласно фиг.З фиксаторы 7 и 8 колеблются одновременно, что вызывает одновременное шаговое перемещение направляющих 1, 2 и связанной с ними каретки 110
Согласно фиг.4, с направляющей 2 взаимодействует фиксатор 8 и дополнительный фиксатор 14о При этом на каждое колебание шкива 4 подачей импульсов напряжения на фиксаторы 8, 14 обеспечивает перемещение направляющей 2 с удвоенной частотой, так как связанные с ними гибкие тяги 6, 13 поочередно охватывают шкив 4, что вызывает шаговое перемещение каретки 11 с удвоенной частотой.
Согласно фиг о 5, за каждое полное колебание шкива 4, гибкие тяги 5 и 6 и связанные с ними фиксаторы 7 и 8 совершают два полных колебания. В результате каретка 11 перемещается с удвоенной частотой шаговых перемещений относительно частоты колебаний двухпозиционного привода 3.
Формула изобретения
1.Устройство для шагового перемещения манипулятора, содержащее две подвижные относительно основания направляющие, двухпозицонный привод, систему управления, каретку и фиксаторы, установленные с возможностью взаимодействия с направляющими, отличающееся тем, что, с целью упрощения конструкции за счет упрощения привода, оно снабжено шкивом, связанным с двухпозиционным приводом
и гибкими тягами, а направляющие расположены взаимно перпендикулярно с возможностью взаимодействия своими торцами с кареткой, при этом одни концы гибких тяг связаны со шкивом, а другие - с соответствующими фиксаторами, подпружиненными к основанию, а двухпозицонный привод выполнен в виде реверсивного привода поворота.
2.Устройство, по п.1, о т л и - чающееся тем, что, с целью повышения частоты шаговых перемещений по крайней мере вдоль одной из направляющих, оно снабжено дополнитель5
ным фиксатором, установленным с возможностью взаимодействия с этой направляющей, и дополнительной гибкрй тягой, один конец которой связан со шкивом, а другой - с дополнительным фиксатором.
по п.1, о т л и - тем, что гибкие по касательной к
по п.1, о т л и - тем, что гибкие тяги
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения манипулятора | 1980 |
|
SU897496A1 |
| Устройство для перемещения преимущественно руки манипулятора | 1981 |
|
SU1024266A1 |
| Установка для наплавки | 1988 |
|
SU1593819A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Многовыходной преобразователь движения | 1989 |
|
SU1807272A1 |
| Мобильный робот | 2023 |
|
RU2824025C1 |
| РАСКЛАДЧИК НАМОТОЧНОГО СТАНКА | 2009 |
|
RU2392214C1 |
| Привод шагового перемещения | 1988 |
|
SU1574449A1 |
Изобретение относится к машино- и приборостроению и предназначено для использования в автоматизированном и технологическом оборудовании, преимущественно в робототехнике, для осуществления шагового перемещения исполнительных органов. Целью изобретения является упрощение конструкции за счет упрощения привода. Устройство содержит взаимоперпендикулярные направляющие 1 и 2, двухпозиционный реверсивный привод поворота, систему управления, каретку 11, установленную с возможностью перемещения вдоль опоры. Шкив 4 соединен при помощи гибких связей 5, 6, расположенных вдоль направляющих 1, 2, с фиксаторами 7, 8, которые возвращаются в исходное положение пружинами 9, 10. Перемещение направляющих 1 и 2, а следовательно, и каретки 11 происходит при срабатывании фиксаторов 7, 8 в требуемой фазе движения двухпозиционного привода. 3 з.п.ф-лы, 5 ил.
//
nS777
/77777/
расположены по радиусу шкива.
ВидА
77777
///////
Фиг. 2
Фиг 4
фиг.Ъ
| Авторское свидетельство СССР If , кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ( УСТРОЙСТВО ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ МАНИПУЛЯТОРА | |||
