О
ю
4:
сл
ю
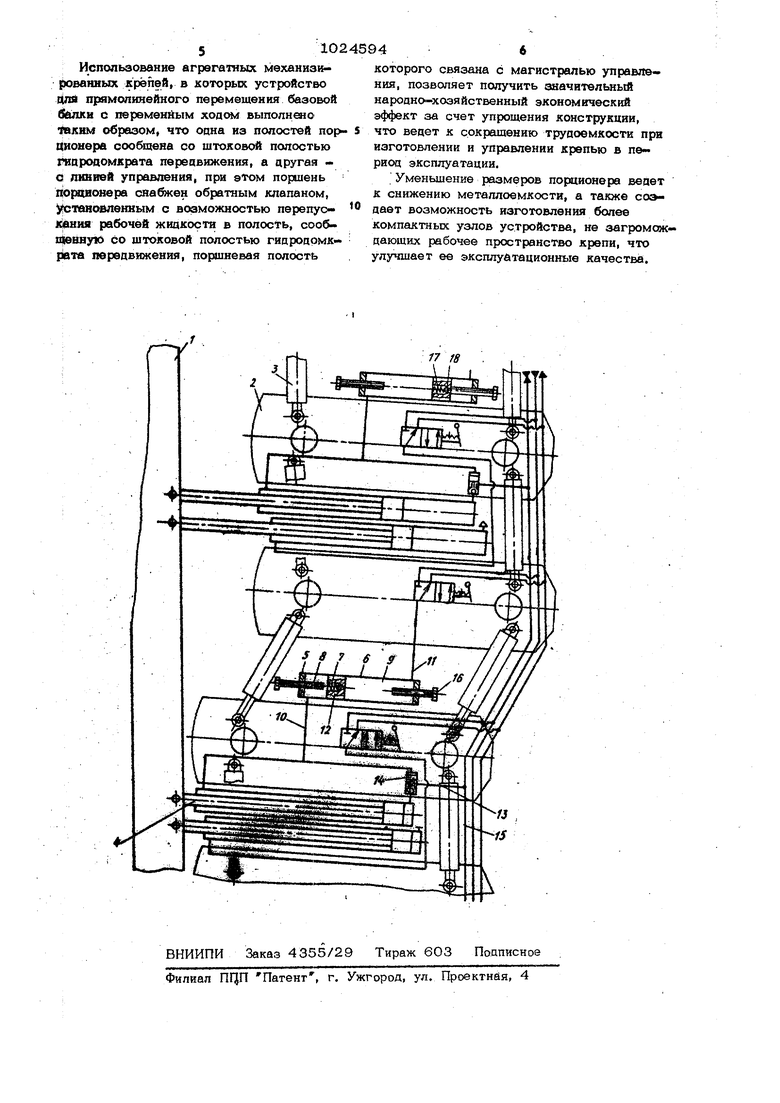
4 ч102 Изобретение относится к целу и может быть использовано в угольной прсж1ышленйост11 для механизированного крепления и управления кровлей очистных забоев крутых и наклонных пластов. Известны агрегатные шахтные системы для перемещения забойного оборудования, состоящие из средств крепления и базы, гидравлического устройства для перемещения базы выемочной машины с переменным ходом, включающего один или нескопь ко подающих гидроцнлиндров двухсторонне- го действия, установленных нг извлекаемых опорах и, п яшадлежашие гидроцилинд- рам дозирующие устройства, ход поршней которых регулируется с помощью переставляемых ограничителей. Пориень дозирующе- го устройства является дифференциальным, а рабочие камеры дозатора через клапан управления и обратный клапан гидравличе ски сообщены с поршневой полостью пода- - ющего гидроцилиндра и с линией управления . Наиболее близким к предлагаемому является устройство для перемещения базовой балки мехавизированнсй крепи, включающее закрепленные одними концами на секциях базовой балки, а другими - на секциях крепи гидродомкраты передвижения с поршневыми полостями, связанными с линией управления, порционер двух стороннего действия, х выполненный в виде цилиндра с разделенными поршнем полостями, одна из которых сообщена с линией управления, и гидравлические линии связи 2 , Конструкция устройства для прямолинейного перемещения базы с регулируемым ходом в известной крепи выпиэлнена таким образом, что для производства очередного .цикла передвижения на какой-либо постоянно установленный шаг попеременно вводится в действие каждая полость порционера. Это обусловленотем, что обе камеры порционера сообщены с по|зщневой полостью гидроцилиндра, при этом каждая из них управляется отдельной линией. Наличие двух линий и двух позиций на блоке управления, с которъгх подается одна и та же команда, создает неудобства для оператора по управлению крепи и снюкает надежность выполнения точной последовательности операцийпередвижки, так как всегда возникает необходимость выбора при переключении рукояти на блоке управления из нейтрали в одно из двух возможнъ1х рабочих положений. Наличие двух гидрораспр1еделителей золотникового типа и трех магистралей 94 управления усложняет коиструкцию гидросистемы-крепи в целом и снижают надежность ее работы в особенности при работ на водно-масляных эмульсиях. Так как порцисжер сообщен с поршневой полостью гндроцилиндра, то для произвсиства полного шага гицроцилиндром он имеет такой же объем, как и объем последнего. При том же диаметре порционера, что и у гидроцилиндров, длины обоих оказывают ся равными. Но так, как порционер снабжен еще и регулирующими элементами, с помощью которых регулируется шаг гицроцилиндра от минимальной до максимальной величины, то общие габариты порци1 онера оказываются значительно большими, чем размер гидроцилиндра. Размещение такого громоздкого устройства, в стестенньЬс условиях рабочего пространства секций механизированной крепи, имеющей большой щаг передвижения, к,ак, например крепи КГУ, весьма затруднительно и не всегда возможно. . Указанные недостатки известных механизированных крепей, оборудованных устройствами для прямолинейного перемещения базы, снижают их эксплуатационные качества. Необходимость применения агрегатных механизированньсх крепей, имеющих устройства для получения переменного шага передвижения на наклонных и крутых пластах, стоит особо остро в связи с тем, что при увеличении глубины разработки угольных пластов в Центральном районе Донбасса, ухудшается состояние вмещающих пород в призабойном пространстве. Это требует от механизированных крепей, в частности механизированных комплексов КГУ, работакших в этих условиях, наличия в их конструкции более соверщенных средств, обеспечивающих дифференциацию величины щага передвижения. Целью изобретения является повыше- ние надежности работы крепи путем уменьшения влиятия утечек на величину щага передвижки крепи. Поставленная цель достигается тем, что в устройстве для перемещения базоБОЙ балки механизированной крепи, включакхцем закрепленные одними концами на секциях базовой балки, а другими - на секциях крепи гидродомкраты передвижения с поршневыми полостями, связанными с линией управления, порционер двухстороннего действия, выполненный в виде цилиндра с разделенными поршнем полостями, одна из которых сообщена с линией управления, и гидравлические линии связи. вторая попсють порционеpa сообщена со штоковсй полостью гидроцомкрата перецви жения, а- поршень порционера снабжен о&ратным клапаном, установленным с возможностью перепускания рабочей жидкости из первой полости порционера во вторую. Гидравлическая связь одной из полосте порционера со штоковой полостью гидродомкрата передвижения позволяет сократить объем порционера, а, следователь но, и его размеры, так как объем штоко вой полости всегда меньше по{Ш1невой на величину объема штока, В обычных силовых шахтных гиароцомкратах объемы полостей относятся, применяю, как 1:2. Наличие в поршне порционера обратног клапана, установленного с возможностью перепускания рабочей жидкости в полость сообщенную со штоковой полостью гидродомкрата передвижения, позволяет пожимать гидродомкрат в конечное положение после того, как поршень,порционера использовал весь свой ход, а штоковая полость гидродомкрата еще не вся заполнена рабочей жидкостью в результате ее возмошныа потерь. Наличие двух линий управления вместо трех, а также отсутствие золотниковых гидрораспределителей упрощает конструкцию крепи и управление ею. На чертеже показана конструкция креп и принципиальная гидравлическая схема устройства для прямолинейного перемещения базы с регулируемым ходом, установ ленного на четных секциях. Агрегатная механизированная крепь содержит базовую балку 1 и секции 2 с телескопическими связями 3 и с уст ройствами для прямолинейного перемещения базовой балки 1. Каждое устройство состоит из гидродомкрата 4 пере- движения, соединенного своими концами . с базовой балкой 1 не секцией 2, порционера 5 двухстороннего действия, выполненного в виде цилиндра 6 с размвшв ным в нем .поршнем 7, разделяющим его на ПОЛОСТИ 8 и 9. Одна из полостей, например 8, гидравлически сообщена со штоковой полсстыо гидродомкрата 4 лини ей Ю, а пойостью 9 - с линией 11 управления. Поршень 7 порционера 5 снабжен обратным клапаном 12, который установлен с возможностью перепускания рабочей жидкости в полость 8 порционе- ра 5, сообщенной со штоковой полостью гидродомкрата 4, поршневая полость которого линией 13 через обратный разгру зочный клапан 14 гидравлически связана с транзитной магистралью 15. В торцо. вых стенках порционера 5 установлены регулировочные элементы 16 в виде фиксируемых стержней с делениями. Пружина 17 обратного клапана 12, поджимак. щая запирающий щарик 18, выполнена на усилие, равное разности давления в полостях порционера 5. При фланговой передвижке крепи, например, снизу вверх, устройства для прямолинейного перемещения базовой балки 1 могут быть установлены на четных секциях 2. Работе механизированной крепи предшествует настройка пориисжеров 5 с помощью регулировочных элементов 16 на необходимую величину хода гидродомкратов передвижения. Подачей рабочей жид- : кости под давлением в линии 11 управления производится перемещение поршней 6 порционеров 5 в крайнее рабочее положение и одновременно через обратные клапаны 12 заполнение штоковых полостей гидродомкратов 4. Затем производится фронтальное передвижение базовой балки 1 в сторону забоя. Лля этого в транзитную магистраль 15 подается под давлением рабочая жидкость, которая через лнкни 13 заполняет поршневые полости гидроцомк- ратов 4. При этом из их штоковых попоотей жидкость выдавливается через линии 10 в полости 8 пораионер«ю 5, перемещая их поршни 7 в противоположи ные стороны до упора на величину установленного хода. Полости 9 в это время , связаны со сливом через линии 11 управления. Окончание перемещения .поршней 7 до упора в регулировочный элемент 16 во всех nopuHOHepiax 5 является окончан ем передвижения базовой балки 1, после чего производится передвижение секций 2 к базовой балке 1. Для этого через линию 11 управления каждой передвигаемой секции последовательно подается .рабочая жидкость под давление в п лость 9 порционера 5, которая воздвй-, ствуя на поршень 7, выжимает жидкость из полости 8 в штоковую полость гядродомкрата 4, вынуждая его производить работу. В случае утечек жидкости из штоковой полости гидродомкрата 4, при кажпом цикле передвижения производится автоматическая ее подпитка через обратный клапан 12, который настраивается на усилие, равное разности давлений в полостях 8 и 9 и срабатывает в случае уменьщения давления в полости 8, когда поршень 7 уже использовал весь свой ход в сторону полости 8. 510 Использование агрегатных механизированных крепей, в хоторьк устройство aind прямолинейного перемещения базовой бйлки с переменйым xoacMwf выполнено f&KHM обрезом, что оцна из полостей пор ционера сообщена со штоковой полостью гипроаомкрата передвижения, а другая с пинией управления, при этом поршень Т1О{х1ионера снабжен обратным клапаном, установленным с возможностью перепусJKBHHfl рабочей жидкости в полость, сооб пленную со штоковой полостью гипродомкрвта передвижения, поршневая полость
улучшает ее эксплуатационные качества. 4 которого связана с магистралью управления, позволяет получить значительный народно-хозяйственный экономический эффект за счет упрощения конструкции, что ведет к сокращению трудоемкости при изготовлении и управлении крепью в пе риод эксплуатации. Уменьшение размеров порционе ра ведет к снижению металлоемкости, а также соэдает возможность изготовления более компактных узлов устройства, не загромождающих рабочее пространство крепи, что

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прямолинейного перемещения базы крепи | 1982 |
|
SU1116171A1 |
| Гидросистема секции механизированной крепи | 1984 |
|
SU1213212A1 |
| Устройство для прямолинейного перемещения базы крепи | 1975 |
|
SU654804A1 |
| Секция механизированной крепи | 1982 |
|
SU1113562A1 |
| Устройство для прямолинейного перемещения базы крепи | 1975 |
|
SU575427A1 |
| Устройство для прямолинейного перемещения базы крепи | 1990 |
|
SU1760184A1 |
| Устройство для обеспечения прямолинейности базы крепи | 1977 |
|
SU735795A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления гидравлической крепью | 1974 |
|
SU726345A1 |
| Устройство для передвижки крепи | 1985 |
|
SU1259032A1 |
УСТРОЙСТВО ДЛЯ ПЕРЕМЕШЕНИЯ:БАЗОВСЙ БАЛКИ МЕХАНИЗИРОВАННОЙ КРЕПИ, включающее закрепленные оаними концами на секциях базовой балки, а другими - на секциях крепи гид родом- краты передвижения с поршневыми полостями, связанными с линией управления, порци жер двухстороннего действия, выполненный в виде цилиндра с разделенными поринем полостями, одна из которьк сообщена с линией управления, и гидрав|лические линии связи, отличающееся тем, что, с целью повышения надежности работы путем уменьшения влияния утечек на величину шага передвижки крепи, вторая полость порционера сообщена со -штоковой полостью гидродомкрата передвижения, а поршень порционера снабжен обратным клапаном, установлен; ным с возможностью перепускания рабо,чей жидкости из первой полости порцио- /f нера во вторую.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПИИ | 2004 |
|
RU2264239C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для прямолинейного перемещения базы крепи | 1975 |
|
SU575427A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ; | |||
