ю ел
со
4
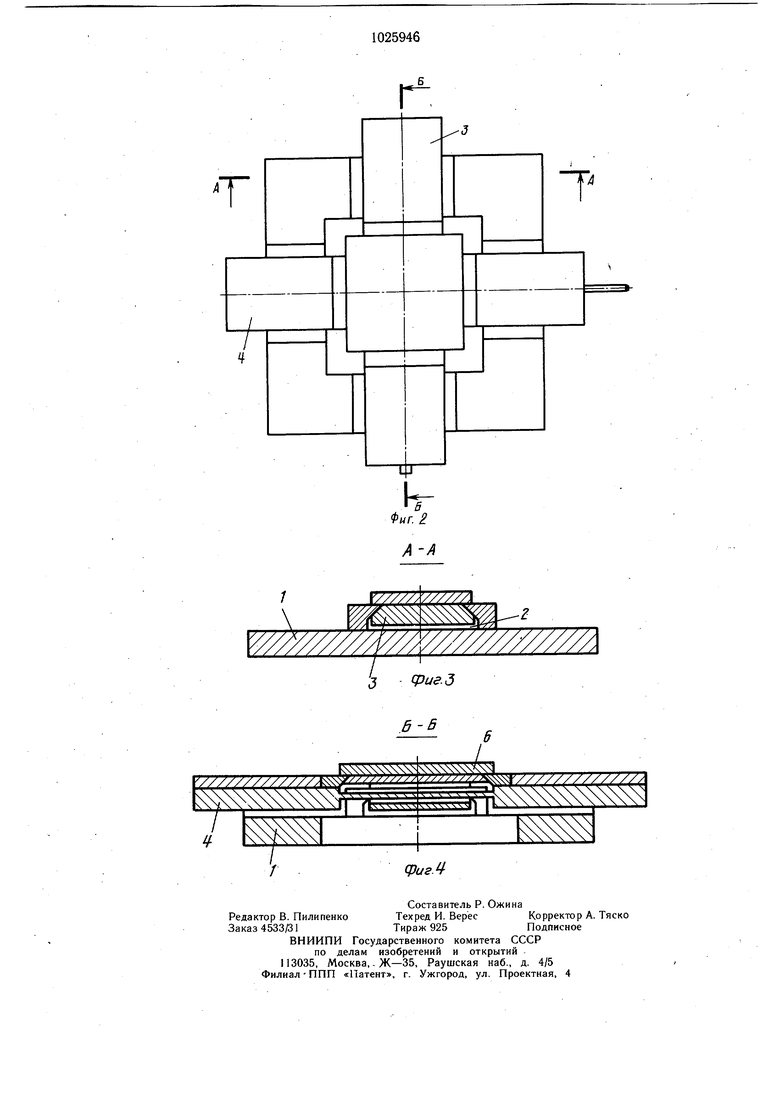
05 Изобретение относится к приборостроению и может быть использовано для перемещения изделия объекта, инструмента по двум координатам. Известно устройство двухкоординатного перемещения, содержащее основание с взаимно перпендикулярными пазами, выполненными на его противолежащих сторонах, размещенные в них направляющие, а пазы выполнены на различной глубине 1. Недостатком известного устройства является низкая точность перемещения, обусловленная тем; что плоскости скольжения сторон направляющих отличны по высоте, что влечет за собой также трудности в их изготовлении и сборке устройства в целом. Цель изобретения - повыщение точности перемещения. Указанная цель достигается тем, что в устройстве двухкоординатного перемещения, содержащем основание с взаимно перпендикулярными пазами, выполненными на его противолежащих сторонах, размещенные в них направляющие и элемент, установленный с возможностью перемещения относительно последних, поверхности пазов расположены в одной плоскости. На фиг. 1 изображено устройство двухкоординатного перемещения, общий вид в разрезе; на фиг. 2 - то же, вид сверху с указанием взаимного расположения направляющих; на фиг. 3 - А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2. Устройство двухкоординатного перемещения содержит основание 1, выполненное в виде рамы с расположенными на одном уровне по центру каждой из сторон рамы пазами 2, поверхности которых расположены в одной плоскости. В соосных пазах 2 установлены прямолинейные направляющие 3 и 4, расположенные по отнощению друг к другу перпендикулярно и на одном уровне. В месте взаимного пересечения направляющих 3 и 4, в центральной их части, поперек каждой из направляющих выполнены дополнительные пазы 5 и 7, причем они открыты навстречу соответствующим направляющим и имеют глубину, позволяющую пересекаться направляющим 3 и 4 без соприкосновения. Ширина каждого из этих пазов равна сумме щирины входящей в него направляющей и длины хода направляющей по данной координате. В пазу 5 направляющей 4 установлен без зазоров подвижный элемент 6, выполненный в виде квадратной пластины, установленной без зазоров в дополнительном пазу 7 направляющей 3. Устройство двухкоординатного перемещения работает следующим образом. При приложении силы к направляющим или 4, или к обеим одновременно в наравлении вдоль их оси направляющие буут перемещаться на требуемое расстояние заданной точностью в пазах 2 рамы осноания 1. Вследствие расположения подвижого элемента 6 в пазу 5 направляющей 4 пазу 7 направляющей 3 он будет перемеаться по двум координатам на расстояия, равные перемещению направляющих и 4 по этим координатам в пазах 2 осноания 1. Паз 5 направляющей 4 будет удерживать подвижный элемент 6 при перемещении направляющей 3 в пазах 2 основания от его перемещения по отнощению к направляющей 4 в направлении ее перемещения. Аналогично паз 7, выполненный на направляющей 3, будет удерживать подвижный элемент 6, при перемещении направляющей 4в пазах основания от его перемещения в направлении движения направляющей 3 по отнощению к этой направляющей. Так как прямолинейные направляющие 3 и 4 установлены в пазах 2 основания, расположенных по обе стороны по отнощению к подвижному элементу 6, то они имеют максимально возможную и постоянную базу, определяемую габаритным размером основания 1, что значительно увеличивает точность и жесткость устро ства. Расположение направляющих 3 и 4 на одном уровне уменьщает габаритный размер устройства по толщине и увеличивает его точность и исключает возможный перекос подвижного элемента. Вследствие расположения пазов основания и установленных в них прямолинейных направляющих по центру сторон основания, сохраняется постоянная нагрузка на приводы направляющих для обеих координат, а также увеличивается жесткость и точность. Расположение пазов 5 и 7 на одном уровне исключает возможность перекоса подвижного элемента и увеличивает точность и жесткость устройства, а также уменьщает его габариты. Для повыщения технологичности устройства основание, направляющие и подвижный элемент могут быть выполнены составными. Устройство двухкоординатного перемещения обладает высокой точностью, имеет малые размеры, технологично в изготовлении и может использоваться в прецизионных роботах-манипуляторах.
4 I
j
Г4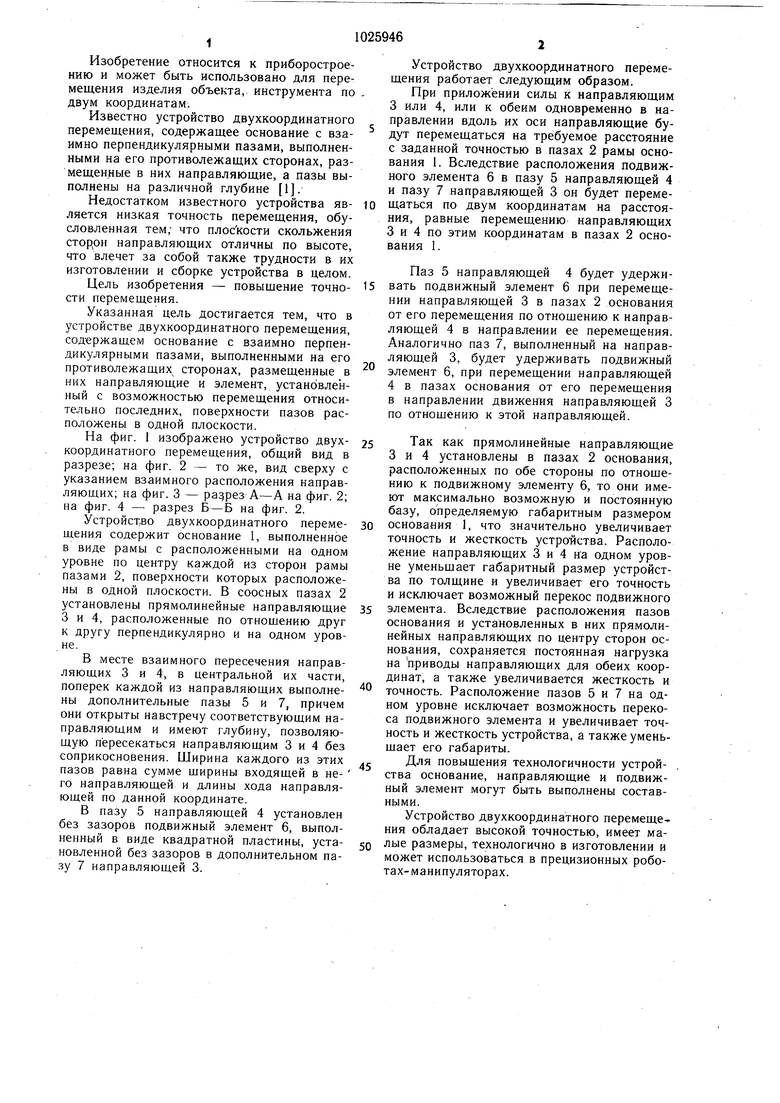
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Устройство двухкоординатного перемещения | 1977 |
|
SU702197A1 |
| Устройство двухкоординатного перемещения | 1981 |
|
SU1032258A1 |
| Устройство двухкоординатного перемещения | 1987 |
|
SU1460485A1 |
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| ТРЕХКООРДИНАТНЫЙ ПРЕЦИЗИОННЫЙ СТОЛИК (ВАРИАНТЫ) | 2007 |
|
RU2368021C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| 3D-ПРИНТЕР | 2017 |
|
RU2649738C1 |
| ПЛАНАРНЫЙ СКАНЕР | 1989 |
|
SU1841123A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ КРУПНОГАБАРИТНОГО ОБЪЕКТА | 2016 |
|
RU2624599C1 |
УСТРОЙСТВО ДВУХКООРДИНАТНОГО ПЕРЕМЕЩЕНИЯ, содержащее основание с взаимно перпендикулярными пазами, выполненными на его противолежа- щих сторонах, размещенные в них направляющие и элемент, установленный с возможностью перемещения относительно последних, отличающееся тем, что, с целью повышения точности перемещения, поверхности пазов расположены в одной плоскости.
-jr
. /4-Л
У//////////А////////////9У /Л
qjue.d
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство двухкоординатного перемещения | 1977 |
|
SU702197A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
