Изобретение относится к области электрофизических установок, а более конкретно к устройствам, обеспечивающим перемещения объектов больших габаритов и массы по шести координатам, в частности, для изменения положения одного узла установки относительно другого.
Известно устройство для перемещения объекта (В.В. Мизилин и А.А. Ковальчук, «Координатный стол», авторское свидетельство SU №917378, кл. МПК H05K 13/02, 13/08, опубл. 30.03.82), содержащее неподвижное основание, платформу для размещения объекта, две расположенные под прямым углом каретки, снабженные направляющими прямолинейного перемещения и винтовыми приводами.
Недостатком конструкции данного устройства является то, что направляющие элементы приводов выполнены в виде цилиндрических стержней и фасонных роликов, которые обладают недостаточной жесткостью и поэтому деформируются в случае расположения на платформе массивного объекта. Кроме того, устройство перемещения обладает только двумя степенями свободы.
Известно также устройство для регулирования положения крупногабаритного объекта (В.И. Марьин и Л.И. Лагерев. «Устройство для регулирования положения объекта по двум взаимно перпендикулярным направлениям», авторское свидетельство SU №436394, кл. МПК G12B 5/00, опубл. 15.07.74), содержащее неподвижное основание, на котором установлена пластина с круглым центральным отверстием, а также два винтовых привода для перемещения пластины в двух взаимно перпендикулярных направлениях и две каретки, установленные в направляющих прямолинейного перемещения.
Недостатками указанного устройства является то, что изменение положения объекта производится только по двум координатам, что ограничивает функциональные возможности устройства; использование V-образных направляющих с шариковыми опорами существенно снижает допустимую массу объекта.
Указанное устройство выбрано в качестве прототипа предложенного решения.
Задачей изобретения является создание устройства для регулирования положения крупногабаритного массивного объекта с большим количеством степеней свободы.
Технический результат изобретения заключается в расширении функциональных возможностей устройства за счет обеспечения перемещения крупногабаритного объекта по трем координатам (X, Y, Z), возможности поворота относительно трех взаимно перпендикулярных осей и повышения грузоподъемности устройства.
Указанный технический результат достигается тем, что в устройстве для регулирования положения крупногабаритного объекта, содержащем неподвижное основание, на котором установлена пластина с круглым центральным отверстием, а также два винтовых привода для перемещения пластины в двух взаимно перпендикулярных направлениях и две каретки, установленные на направляющих прямолинейного перемещения, новым является то, что основание выполнено в виде прямоугольной рамы с прикрепленной к ней снизу плитой, пластина с помощью четырех винтовых шаровых опор с подпятниками установлена на плите основания, на пластине установлена платформа для размещения крупногабаритного объекта с возможностью вращения вокруг оси центрального отверстия пластины, винтовые приводы установлены на перпендикулярных сторонах рамы, а каретки выполнены в виде Т-образных пластин, установленных параллельно плите основания с вертикальным зазором друг относительно друга, причем на концах центральных выступов Т-образных пластин жестко закреплены гайки, в которые входят винты приводов, а на концах поперечных частей Т-образных пластин выполнены пазы, в которых расположены три подпятника с возможностью их перемещения только вдоль поперечных частей Т-образных пластин, при этом один из этих трех подпятников находится одновременно в пазах обоих Т-образных пластин, кроме того, Т-образные пластины установлены на направляющих прямолинейного перемещения, жестко связанных с плитой основания, причем Т-образные пластины имеют возможность перемещения поперек их поперечных частей.
Кроме того, каждая винтовая шаровая опора содержит винт, закрепленные на пластине втулку с резьбовым отверстием и дополнительную втулку, с внутренним диаметром, равным наружному диаметру резьбы, соосную с втулкой с резьбовым отверстием, причем втулки расположены на расстоянии друг от друга вдоль оси винта.
Кроме того, Т-образные пластины расположены с зазором относительно внутренних поверхностей рамы основания.
Кроме того, платформа имеет цилиндрический выступ, входящий в центральное отверстие пластины.
Кроме того, пластина и платформа для размещения крупногабаритного объекта связаны приводом вращения платформы.
Усилие от объекта передается непосредственно от пластины к плите основания через шаровые винтовые опоры с подпятниками, не нагружая подвижные элементы устройства (каретки, направляющие кареток, винты приводов кареток).
Выполнение кареток в виде Т-образных пластин, установленных параллельно плите основания с вертикальным зазором друг относительно друга, а также установка винтовых приводов на перпендикулярных сторонах рамы основания и жесткое закрепление гаек, в которые входят винты приводов, на концах центральных выступов Т-образных пластин позволяет обеспечить возможность взаимоперпендикулярного перемещения кареток с небольшим усилием друг относительно друга в плоскости, параллельной основанию. Это дает возможность перемещения объекта по двум координатам. Кроме того, устройство кареток позволяет исключить воздействие на них непосредственного веса перемещаемого объекта.
Обеспечение перемещения крупногабаритного объекта по вертикальной оси (чего не было в прототипе) возможно благодаря вращению шаровых винтовых опор.
Обеспечение вращения крупногабаритного объекта вокруг двух взаимно перпендикулярных осей в горизонтальной плоскости (OX, OY) обеспечивается вращением винтов шаровых винтовых опор. Вращение крупногабаритного объекта вокруг вертикальной оси (OZ) обеспечивается вращением винтов привода вращения платформы.
При вращении пластины вокруг двух взаимно перпендикулярных осей в горизонтальной плоскости соединение подпятников с шаровой поверхностью винтов предотвращает возникновение перекосов и внутренних напряжений в конструкции устройства.
Перемещение объекта в вертикальной плоскости обеспечивается вращением четырех винтов винтовых шаровых опор.
Выполнение основания в виде прямоугольной рамы с прикрепленной к ней снизу плитой обеспечивает необходимую прочность и жесткость основания.
Размещение винта шаровой опоры в соосно расположенных на расстоянии друг от друга вдоль оси винта втулках уменьшает величину сил, воздействующих на винт от втулок, возникающих от силы трения при перемещении подпятника по плите основания (предотвращает заклинивание винта шаровой опоры в резьбовом отверстии).
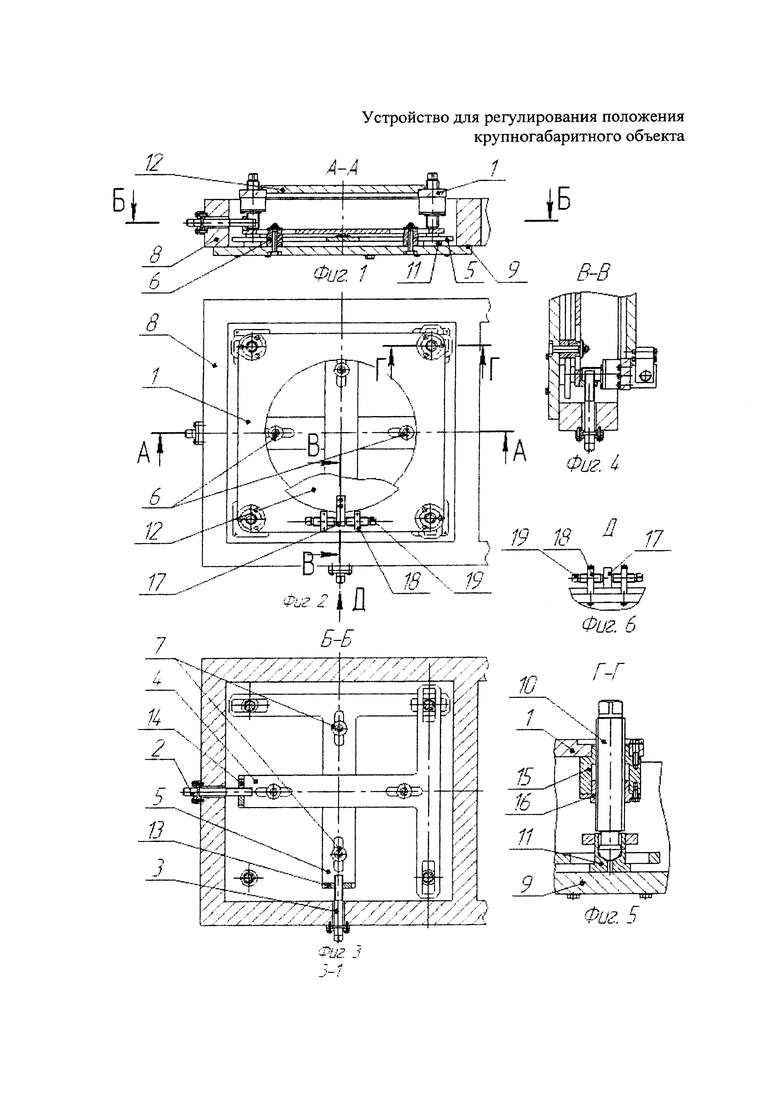
На фиг. 1 изображен продольный разрез по А-А заявляемого устройства.
На фиг. 2 изображен вид сверху заявляемого устройства.
На фиг. 3 изображен разрез по Б-Б заявляемого устройства.
На фиг. 4 изображен разрез по Г-Г заявляемого устройства.
На фиг. 5 изображен разрез по В-В заявляемого устройства.
На фиг. 6 изображен вид Д.
На фиг. 1, 2, 3, 4, 5, 6 изображено:
1 - пластина;
2, 3 - винтовые приводы для перемещения пластины;
4, 5 - каретки;
6, 7 - направляющие прямолинейного перемещения кареток;
8 - прямоугольная рама;
9 - плита основания;
10 - винтовая шаровая опора;
11 - подпятник винтовой шаровой опоры;
12 - платформа для размещения юстируемого объекта;
13, 14 - гайки кареток;
15 - втулка с цилиндрическим отверстием, диаметр которого равен наружному диаметру резьбы;
16 - втулка с резьбовым отверстием;
17 - кронштейн, закрепленный на платформе;
18 - стойки, закрепленные на пластине;
19 - винты.
Устройство для регулирования положения крупногабаритного объекта содержит неподвижное основание, на котором установлена пластина 1 с круглым центральным отверстием, а также два винтовых привода 2 и 3 для перемещения пластины 1 в двух взаимно перпендикулярных направлениях и две каретки 4 и 5, установленные в направляющих 6 и 7 прямолинейного перемещения, причем основание выполнено в виде прямоугольной рамы 8 с прикрепленной к ней снизу плитой 9, пластина 1 с помощью четырех винтовых шаровых опор 10 с подпятниками 11 установлена на плите 9 основания, на пластине 1 установлена платформа 12 для размещения крупногабаритного объекта с возможностью вращения вокруг оси центрального отверстия, винтовые приводы 2 и 3 установлены на перпендикулярных сторонах рамы 8, а каретки 4 и 5 выполнены в виде Т-образных пластин, установленных параллельно плите 9 основания с вертикальным зазором друг относительно друга, причем на концах центральных выступов Т-образных пластин жестко закреплены гайки 13 и 14, в которые входят винты приводов 2 и 3, а на концах поперечных частей Т-образных пластин выполнены пазы, в которых расположены три подпятника 11 с возможностью их перемещения только вдоль поперечных частей Т-образных пластин, при этом один из подпятников находится одновременно в пазах обоих Т-образных пластин, кроме того, Т-образные пластины установлены на направляющих 6 и 7 прямолинейного перемещения, жестко связанных с плитой 9 основания с возможностью перемещения поперек поперечных частей Т-образных пластин.
Пластина 1 и платформа 12 для размещения крупногабаритного объекта связаны приводом вращения платформы, состоящим из кронштейна 17, закрепленного на платформе, стоек 18, закрепленных на пластине 1, и двух соосно расположенных винтов 19 в резьбовых отверстиях стоек, упирающихся в кронштейн.
Работает заявляемое устройство следующим образом.
При вращении винта привода 2 для перемещения пластины движется каретка 4 с находящимися в пазах поперечной части каретки подпятниками 11 винтовых опор, винтовыми опорами пластины и пластиной 1 с платформой 12. При этом подпятник, находящийся одновременно в пазу первой 4 и второй 5 каретки, свободно перемещается по пазу второй каретки, так как паз направлен параллельно оси винта привода первой. Второй привод 3, расположенный перпендикулярно первому, аналогично перемещает пластину 1 с платформой 12 в поперечном направлении (винтовые приводы 2 и 3 независимы один от другого). Перемещение платформы 12 с размещенным на ней объектом по вертикальной оси происходит при вращении всех четырех винтов 10 шаровых опор.
Наклон платформы 12 с размещенным на ней объектом относительно горизонтальных осей производится вращением винтов шаровых опор (с одной из сторон винты поднимают край пластины, с другой - опускают противоположный край пластины).
Вращение платформы 12 с размещенным на ней объектом относительно оси центрального отверстия пластины 1 осуществляется вращением винтов 19 в стойках 18 на пластине (один винт вывинчивается, другой ввинчивается навстречу первому, вращая платформу 12 за прикрепленный к ней кронштейн 17).
В примере конкретного выполнения была выполнена подставка для регулирования положения электромагнита бетатрона весом порядка 500 кг. Основные детали устройства для перемещения крупногабаритного объекта выполнены металлическими. Для прикрепления элементов устройства друг к другу использован крепеж. Подпятники для уменьшения силы трения выполнены из латуни. Детали заявляемого устройства просты по форме и не требуют для изготовления высокоточного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Устройство для наполнения мягких контейнеров сыпучим материалом | 1986 |
|
SU1342823A1 |
| 3D-ПРИНТЕР ДЛЯ ПАРАЛЛЕЛЬНОЙ ПЕЧАТИ | 2019 |
|
RU2719528C1 |
| Автоматизированный штамповочный комплекс | 1986 |
|
SU1375398A1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Устройство для вырубки заготовок из плоского материала | 1984 |
|
SU1234003A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
Заявленное изобретение относится к устройствам, обеспечивающим перемещения объектов больших габаритов и массы по шести координатам, в частности, для изменения положения одного узла установки относительно другого. Устройство для регулирования положения крупногабаритного объекта содержит основание, на котором установлена пластина с центральным отверстием, а также два винтовых привода для перемещения пластины в двух взаимно перпендикулярных направлениях и две каретки, установленные на направляющих. Основание выполнено в виде рамы с прикрепленной к ней снизу плитой, а пластина с помощью винтовых шаровых опор с подпятниками установлена на плите основания. При этом на пластине установлена платформа для размещения объекта с возможностью вращения вокруг оси центрального отверстия пластины, а каретки выполнены в виде Т-образных пластин, установленных параллельно плите основания с вертикальным зазором друг относительно друга. Технический результат заключается в расширении функциональных возможностей устройства за счет обеспечения перемещения крупногабаритного объекта по трем координатам (X, Y, Z), возможности поворота относительно трех взаимно перпендикулярных осей и повышения грузоподъемности устройства. 4 з.п. ф-лы, 6 ил.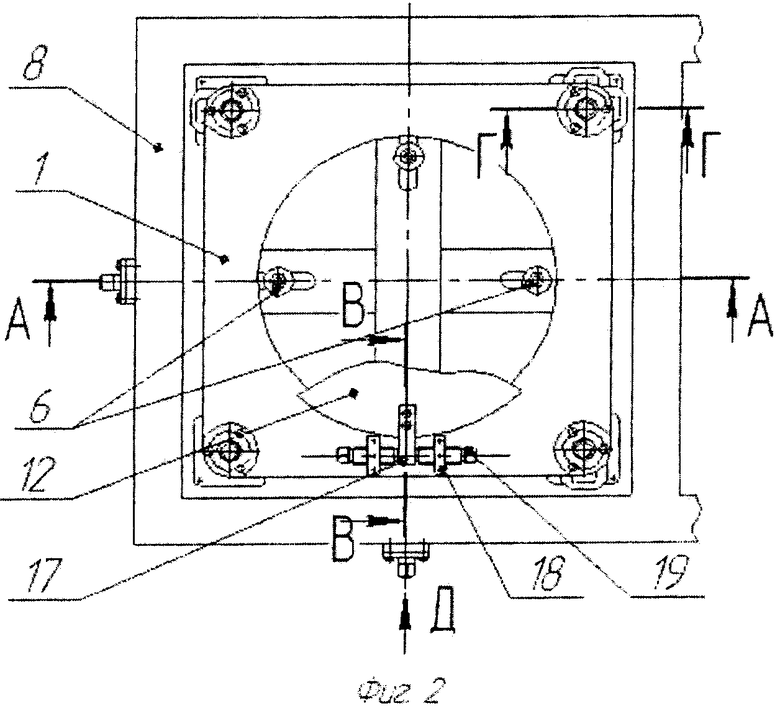
1. Устройство для регулирования положения крупногабаритного объекта, содержащее неподвижное основание, на котором установлена пластина с круглым центральным отверстием, а также два винтовых привода для перемещения пластины в двух взаимно перпендикулярных направлениях и две каретки, установленные на направляющих прямолинейного перемещения, отличающееся тем, что основание выполнено в виде прямоугольной рамы с прикрепленной к ней снизу плитой, пластина с помощью четырех винтовых шаровых опор с подпятниками установлена на плите основания, на пластине установлена платформа для размещения крупногабаритного объекта с возможностью вращения вокруг оси центрального отверстия, винтовые приводы установлены на перпендикулярных сторонах рамы, а каретки выполнены в виде Т-образных пластин, установленных параллельно плите основания с вертикальным зазором друг относительно друга, причем на концах центральных выступов Т-образных пластин жестко закреплены гайки, в которые входят винты приводов, а на концах поперечных частей Т-образных пластин выполнены пазы, в которых расположены три подпятника с возможностью их перемещения только вдоль поперечных частей Т-образных пластин, при этом один из подпятников находится одновременно в пазах обоих Т-образных пластин, кроме того, Т-образные пластины установлены на направляющих прямолинейного перемещения, жестко связанных с плитой основания с возможностью перемещения Т-образных пластин поперек их поперечных частей.
2. Устройство по п. 1, отличающееся тем, что каждая винтовая шаровая опора содержит винт, закрепленные на пластине втулку с резьбовым отверстием и дополнительную втулку, с внутренним диаметром, равным наружному диаметру резьбы, соосную с втулкой с резьбовым отверстием, причем втулки расположены на расстоянии друг от друга вдоль оси винта.
3. Устройство по п. 1, отличающееся тем, что Т-образные пластины расположены с зазором относительно внутренних поверхностей рамы основания.
4. Устройство по п. 1, отличающееся тем, что пластина и платформа для размещения крупногабаритного объекта связаны приводом вращения платформы.
5. Устройство по п. 1, отличающееся тем, что платформа имеет цилиндрический выступ, входящий в центральное отверстие пластины.
| Стенд для разборки неподвижных соединений | 1979 |
|
SU774899A1 |
| RU 2003938 C1 30.11.1993 | |||
| Устройство для регулирования положения объекта | 1986 |
|
SU1406448A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| JPH 60080708 A 08.05.1985. | |||

