Изобретение относится к области транспортной автоматики.
По основному авт. св. 401603 известно реле пробуксовки ленточного конвейера, содержащее кинематически связанный с лентой конвейера датчик скорости, выход которого через усилитель-ограничитель соединен с входом ждущего мультивибратора, логический элемент «ЗАПРЕТ, включенный между входом и выходом ждущего мультивибратора, интегратор, вход которого подключен к выходу ждущего мультивибратора, а выход - ко входу измерительного прибора и через пороговый элемент ко входу исполнительного органа, датчик скорости, кинематически связанный с приводным барабаном конвейера.
Однако при практическом применении известного устройства в большинстве случаев для получения сигнала постоянного тока, характеризующего скорость приводного барабана конвейера, в устройство вводят инерционные выпрямитель и фильтр, что понижает надежность в работе известного устройства, особенно в быстродействующих переходных режимах работы привода конвейера. Кроме того, известное устройство не позволяет контролировать непосредственно скорости ленты и приводного барабана.
Цель изобретения - повыщение надежности в работе и расщирение функциональных возможностей устройства.
Для этого предложенное реле пробуксовки ленточного конвейера содержит умножитель частоты, преобразователь частоты в постоянный ток, дополпительные усилитель-ограничитель, интеграторы, пороговые элементы и исполнительные органы, причем вход каждого из пороговых элементов подключен к выходу
соответствующего интегратора, а выход - ко входу соответствующего исполнительного органа, вход умножителя частоты соединен с выходом датчика скорости, кинематически связанного с приводным барабаном конвейера, а
выход - со входом преобразователя частоты Б постоянный ток, выходы которого подключены к базе открытого в исходном состоянии триода ждущего мультивибратора и входу одного из дополнительных интеграторов, вход
дополнительного усилителя-ограничителя соединен с выходом датчика скорости, кинематически связанного с лентой конвейера, а выход - со входом другого дополнительного интегратора.
Это позволяет исключить ложные срабатывания устройства из-за различной инерционности во входных цепях и повысить надежность его в работе. Кроме того, указанные отличия обеспечивают совмещение устройством функций по раздельному контролю нробуксовки ленты и скоростей ленты и нриводного барабана конвейера.
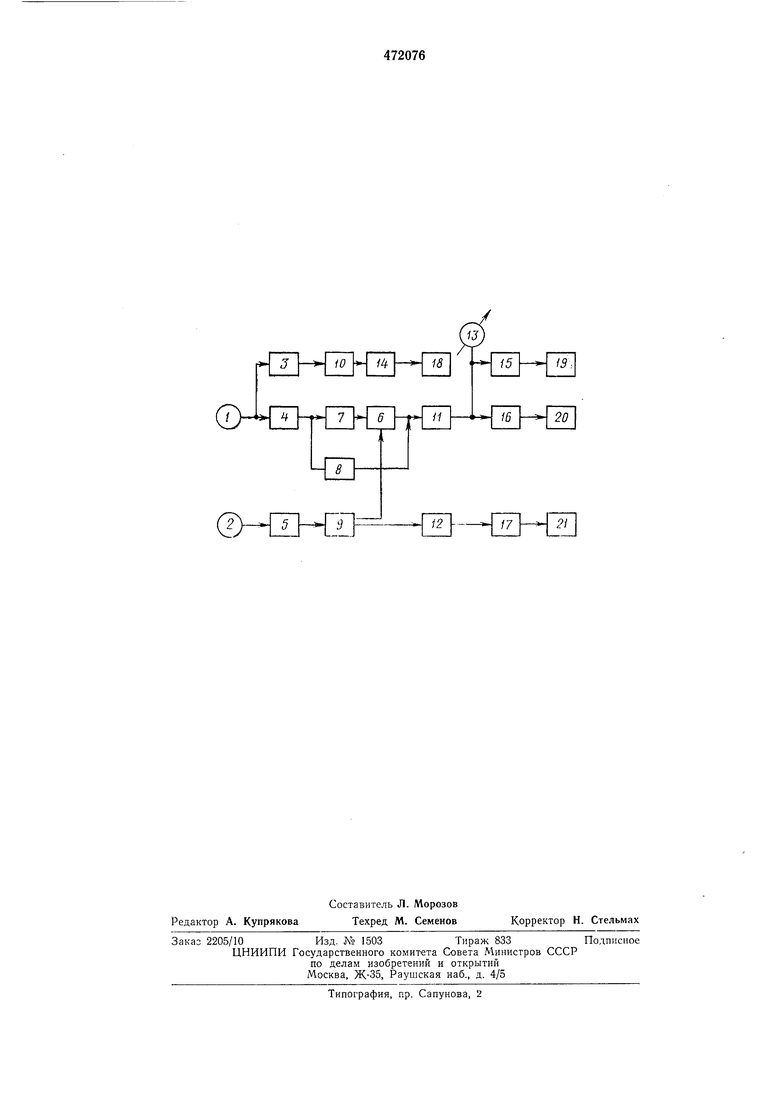
На чертеже представлена функциональная схема предлоЛсенного устройства.
Она содержит датчик 1 скорости, кинематически связанный с лентой конвейера, датчик 2 скорости, кинематически связанный с приводным барабаном конвейера, усилители-ограничители 3, 4, умножитель 5 частоты, ждущий мультивибратор 6 с блоком 7 дифференцирования на входе, логический элемент «ЗАПРЕТ 8, преобразователь 9 частоты в постоянный ток, интеграторы 10-12, измерительный прибор 13, пороговые элементы 14- 17 и исполнительные органы 18-21.
Работа предложенного устройства происходит следующим образом.
Синусоидальный сигнал с выхода датчика 1 скорости, кинематически связанного с лентой конвейера, поступает на вход усилителя-ограничителя 4, который формирует прямоугольные импульсы с длительностью, обратно пропорциональной скорости ленты. Задними фронтами импульсов с выхода усилителя-ограничителя 4 запускается ждущий мультивибратор 6, вырабатывающий прямоугольные импульсы с длительностью, обратно пропорциональной скорости приводного барабана конвейера. Средний разностный ток имнульса, выделяемого на входе интегратора 11 с помощью логического элемента «ЗАПРЕТ 8, после интегрирования однозначно определяет величину нробуксовки.
К выходу интегратора 11 подключен измерительный прибор 13, регистрирующий величину пробуксовки, и через пороговые элементы 15, 16 - исполнительные органы 19, 20, осуществляющие отключение привода конвейера в случае достижения опасной величины соответственно положительной или отрицательной пробуксовки. Подобное разграничение работы исполнительных органов обеспечивается выбором соответствующих уровней срабатывания нороговых элементов 15, 16.
Датчик 1 скорости, усилитель-ограничитель 3, интегратор 10, пороговый элемент 14 и исполнительный орган 18 представляют собой функциональный узел для контроля номинальное скорости ленты конвейера. В исходном состоянии, когда конвейер не работает, исполнительный орган 18 находится в отключенном состоянии. При нормально работающем конвейере исполнительный, орган 18 включен, а отключается при наличии опасного абсолютного снижения скорости ленты или при отсутствии сигналов с выхода датчика 1 скорости.
Датчик 2 скорости, умножитель 5 частоты, преобразователь 9 частоты в постоянный ток, интегратор 12, пороговый элемент 17 и исполпительный орган 21 представляют собой функциональный узел для контроля скорости приводного барабана. В исходном состоянии исполнительный орган 21 отключен. Включается он при достижении приводным барабаном скорости 0,3-0,5 м/сек и более, а отключается и выдает команду на наложение тормозов при снижении скорости нриводного барабана после оперативной остановки ниже указанной .величины.
При необходимости, для исключения ложных срабатываний исполнительного органа 20 узла контроля пробуксовки в моменты запуска конвейера носле остановок и в моменты самих остановок в цепях заряда интегратора 11 и связанного с ним вспомогательного резистивного делителя (на чертеже не показан) следует ввести переключающий контакт исполнительного органа 21 узла контроля скорости приводного барабана конвейера с тем, чтобы в указанные моменты времени осущест,влять разрыв цепи заряда интегратора с одновременным удержанием его напряжения на уровне, несколько большем уровня срабатывания порогового элемента 16.
Предмет изобретения
Реле пробуксовки ленточного конвейера по
авт. св. 401603, отличающееся тем, что, с целью повыщения надежности в работе и расщирения функциональных возможностей, оно содержит умножитель частоты, преобразователь частоты в постоянный ток, дополнительные усилитель-ограничитель, интеграторы, пороговые элементы и исполнительные оргапы, причем вход каждого из пороговых элементов подключен к выходу соответствующего интегратора, а выход - ко входу соответствующего исполнительного органа, вход умножителя частоты соединен с выходом датчика скорости, кинематически связанного с приводным барабаном конвейера, а выход - со входом преобразователя частоты в ностоянный ток, выходы которого подключены к базе открытого в исходном состоянии триода ждущего мультивибратора и входу одного из дополнительных интеграторов, вход дополнительного усилителя-ограничителя соединен с
выходом датчика скорости, кинематически связанного с лентой конвейера, а выход - со входом другого дополнительного интегратора.
(
| название | год | авторы | номер документа |
|---|---|---|---|
| Реле пробуксовки ленточного конвейера | 1972 |
|
SU495248A2 |
| Реле пробуксовки ленточного конвейера | 1976 |
|
SU653185A1 |
| Устройство контроля обрыва и пробуксовки ленты конвейера | 1979 |
|
SU876538A1 |
| Устройство для контроля пробуксовки ленточного конвейера | 1978 |
|
SU737322A1 |
| Устройство для измерения величины проскальзывания ленты конвейера | 1982 |
|
SU1027116A1 |
| Способ защиты ленточного конвейера от аварийного буксования | 1989 |
|
SU1779659A1 |
| Устройство для вибрационных испытаний лентопротяжных механизмов кассетных магнитофонов | 1991 |
|
SU1770981A1 |
| Источник импульсного магнитного поля | 1988 |
|
SU1529154A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1146084A1 |
| Система регулирования трехстадийного комплекса дробления | 1986 |
|
SU1450861A1 |