
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1988 |
|
SU1574513A1 |
| Устройство контроля работоспособности ленточного конвейера | 1989 |
|
SU1759758A1 |
| Устройство контроля смещения ленты конвейера | 1989 |
|
SU1616847A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |
| Устройство контроля колебаний ленты вертикального ленточного конвейера | 1989 |
|
SU1676953A1 |
| Способ контроля проскальзывания и скорости ленты конвейера | 1987 |
|
SU1546371A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Устройство контроля грузонесущей способности конвейера | 1989 |
|
SU1752688A1 |
| Устройство контроля смещения ленты конвейера | 1990 |
|
SU1740282A1 |
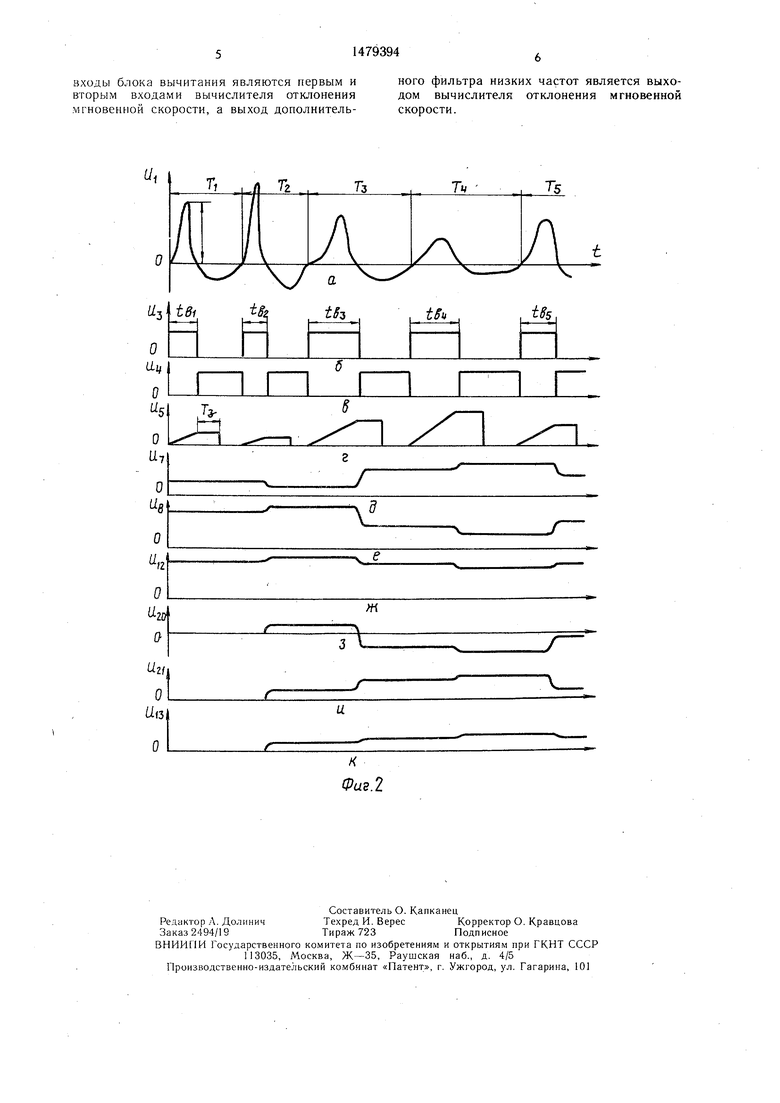
Изобретение относится к автоматизации конвейерного транспорта. Цель - повышение точности контроля скорости и проскальзывания ленты конвейера. Для этого устр-во снабжено вычислителем 21 отклонения мгновенной скорости от ее среднего значения и вычислителем 20 мгновенной скорости. Последний содержит источник 6 стабилизированного опорного напряжения, интегратор 5, блок 7 памяти, блок 9 деления, блок 11 масштабирования, элемент НЕ 4, элемент 8 задержки и задатчик 10 пути взаимодействия. К входу вычислителя 20 подключен через последовательно-соединенные генераторы аналогового сигнала 2 и дискретных импульсов 3 выход датчика 1 взаимодействия с грузонесущим органом конвейера. Выход вычислителя 20 подключен к входам вычислителя 21 и фильтра 12 низких частот, выходы которых подключены соответственно к входам измерительных приборов 14 и 15 и компараторов 16 и 17. Вычислитель 21 состоит из фильтра 13 низких частот, блока 18 вычитания и блока 19 определения модуля сигнала. Фильтр 12 определяет усредненное значение, характеризующее текущую скорость ленты конвейера. Этот сигнал в блоке 18 вычитается из сигнала о мгновенном значении скорости, сформированного блоком 11 масштабирования. Результирующий сигнал, пропорциональный величине проскальзывания ленты относительно приводного барабана, с выхода блока 18 поступает через блок 19 и фильтр 13 на вход компаратора 17. При превышении сигналами, пропорциональными величинам средней скорости и проскальзывания ленты, их допустимых значений на выходах компараторов 16 и 17 появляются сигналы, которые м.б. использованы для автоматического управления конвейером. 1 з.п. ф-лы, 2ил.
«в О
«и
о а
20
и
к Фаз.2
е
| Устройство для измерения величины проскальзывания ленты конвейера | 1982 |
|
SU1027116A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Патент США № 4282967, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
